
非同轴两轮机器人的自平衡分析与控制策略
非同轴两轮自平衡机器人是基于双陀螺转子的进动效应来实现自平衡。双陀螺转子的平衡作用可以加倍,但是其进动角过大与进动不同步是造成系统平衡失效的重要原因。针对前述问题,论文中提出了一种基于增益调度算法与进动角归零补偿的控制策略来消除进动角,同时
标签: 2019-09-22本文整理自IEEEFellow优必选悉尼大学人工智能研究院陶大程教授名为《人工智能正驱动机器人发展》稿件。 上一代机器人依赖的是计算智能,这个时代的机器人通过各种传感器在一定程度上实现了感知智能,未来的机器人将进一步实现高性能的感知智能并且
标签: 2019-09-22演化计算经常用到智能优化和机器学习当中,但是这种机器学习跟大家平常说的深度学习的机器学习不是很一样。演化计算在机器人的脑体一体化设计中应该有相当大的用武之地。演化计算可能是人工智能的下一个热点。本文整理自2018深圳国际机器人与智能系统院士
标签: 2019-09-22
非同轴两轮自平衡机器人是基于双陀螺转子的进动效应来实现自平衡。双陀螺转子的平衡作用可以加倍,但是其进动角过大与进动不同步是造成系统平衡失效的重要原因。针对前述问题,论文中提出了一种基于增益调度算法与进动角归零补偿的控制策略来消除进动角,同时
标签: 2019-09-22
现如今,没有工业机器人的生产配置是不可想象的,机器人的应用领域范围也在持续的增加。但由于自动化工厂期望的是永久稳定的多轴运动,因此驱动机器人的电缆将面临极大的压力。这对于电缆和连接器厂商是一个特殊的挑战。 根据工业行情预测,今年的工业机器人
标签: 2019-09-22
在工业机器人大量参与的自动化生产中,难免因各种情况而需停机调整机器人点位,这一过程往往将进行数小时,这段停机时间造成的产能损失往往让客户难以接受。“快速部署、易于调试”几乎是每个工业机器人集成销售商都会遇到的最大挑战之一。 3C制造行业中,
标签: 2019-09-22
摘要:由于机械加工误差、装配误差与间隙,摩擦磨损等因素的影响,SCARA机器人的实际臂长与理论臂长存在一定偏差;通常难以保证机器人大小臂严格成一直线,造成零点偏移。实际零点及臂长与理论值的偏差,影响机器人的绝对定位精度。传统的标定方法需要昂
标签: 2019-09-22摘要:本文首先对机器人控制器进行定义和分类,机器人控制器是影响机器人性能的关键部分之一,它从一定程度上影响着机器人的发展。本文介绍了目前机器人控制器的现状,分析了它们各自的优点和不足,探讨了机器人控制器的发展方向和要着重解决的问题。 0引言
标签: 2019-09-22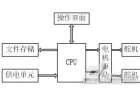
摘要:本文主要介绍了一种非人型打击类机器人。机器人工作方式类似于弹钢琴,用机械臂敲击音键来演奏。整体以STM32单片机为控制核心,机械敲击臂以舵机为活动关节并受芯片控制,它具有人机交互功能,用户可以使用操作界面来控制机器人、管理系统的音乐程
标签: 2019-09-22
摘要:本文所研究的温度测量系统包括:单片机,温度传感器,电源电路、液晶显示电路,温度采集电路,报警电路等组成,利用温度传感器将温度的变化,变换成电流的变化,再转换为电压变化最后再传给单片机,单片机把数据显示成温度变化,如超过规定温度范围则启
标签: 2019-09-22
内存是大脑和计算机的主要部件。在很多深度学习领域,我们通过和记忆匹配来扩展深度网络的能力,例如,提问与回答,我们先记忆或存储事先处理的信息,然后使用这些信息回答问题。 我们通过将神经网络连接到外部存储资源来扩展神经网络的功能,通过记忆过程与
标签: 2019-09-22机器人控制系统是机器人的重要组成部分,用于对操作机的控制,以完成特定的工作任务,其基本功能如下: 1、记忆功能:存储作业顺序、运动路径、运动方式、运动速度和与生产工艺有关的信息。 2、示教功能:离线编程,在线示教,间接示教。在线示教包括示教
标签: 2019-09-22
【应用了AI的机器人运动控制,会有着怎样的变化?】复杂机器人的运动控制,一直是阻挡机器人产业发展的老大难问题,迟迟没有得到很好的解决。即便是代表机器人最高水平的波士顿动力,其机器人离实用也还远。近两年发展迅猛的AI,俨然如万金油般,被用在各
标签: 2019-09-22
机器人电动伺服驱动系统是利用各种电动机产生的力矩和力,直接或间接地驱动机器人本体以获得机器人的各种运动的执行机构。 对工业机器人关节驱动的电动机,要求有最大功率质量比和扭矩惯量比、高起动转矩、低惯量和较宽广且平滑的调速范围。特别是像机器人末
标签: 2019-09-22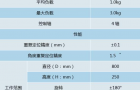
本文介绍CoolDriveA8伺服驱动器在高速并联机器人上的应用方案,通过测试验证,本系统可很好的达到机器人的应用指标。 概述 并联机器人是一类全新的机器人,它具有刚度大、承载能力强、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,
标签: 2019-09-22
内存是大脑和计算机的主要部件。在很多深度学习领域,我们通过和记忆匹配来扩展深度网络的能力,例如,提问与回答,我们先记忆或存储事先处理的信息,然后使用这些信息回答问题。 我们通过将神经网络连接到外部存储资源来扩展神经网络的功能,通过记忆过程与
标签: 2019-09-22
【KUKA结构——工业机器人末端关节结构图】机器人的传动和布局设计从理论上讲应该是比较成熟的领域,如果有样机,拆开一看就可以知道大部分的结构。但是在结构优化设计经验、装配规范的标准化、零配件的按需定制以及供应链优化等方面国内厂商还需要很长时
标签: 2019-09-22
ESTUN智能控制单元完整解决方案(以下简称智能单元),是行业内首个提出针对智能装备制造、自动化产线等,以标准工作单元形式,覆盖机器人控制、运动控制、逻辑控制、视觉控制、模拟仿真控制等功能的运动控制完整解决方案。智能单元方案能够大大提升装备
标签: 2019-09-22
机器人是和电脑、手机一样重要的终端,未来数据量也会是跟电脑、手机一样级别。人工智能是一个非常有AI能力消费的载体。怎么让机器人承担更多工作,取决于大家在人工智能领域的投入。在法务、税务、银行、展厅等领域方面,由机器人替代人的趋势已经非常明显
标签: 2019-09-22
人工智能不仅可以利用图像识别的技术来帮医生看X光片,帮助识别,还可以应用于其他行业,比如教育、汽车、金融领域。未来,我们应该更加关注人工智能,关注人工智能+。 人工智能 互联网VS人工智能 互联网分两个阶段,第一个阶段是电脑端的互联网,第二
标签: 2019-09-22
在实际生活中机器人需要与环境进行交互以执行多种任务,而每个任务都需要进行合理的定位。一种简单的定位检测方法是标注一个图像功能区域数据集,利用这个数据集训练一个深度分类模型,通过模型检测图像中所有可能的潜在功能区域。然而,标注一个这样的大规模
标签: 2019-09-22

 QQ交流群
QQ交流群

