
ABB机器人的基本知识介绍
ABB机器人的基本认识一、机器人基本介绍1、ABB机器人示教器组成部分,共分为八部分,分别为:A连接电缆B触摸屏C急停开关D手动操作摇杆E数据备份用USB接口F使能器按钮G触摸屏用笔H示教器复位按钮 2、机器人本体介绍,本体与控制柜之间的连接主要是电动机动力电缆与转…
标签: 2020-04-19根据资料了解到,加工机器人近些年大范围面世,已经成为衡量机床生产实力的重要指标。这无不说明机床在行业内的重要性。各方企业的布局下,现阶段的加工机器人市场是什么样的呢?消费主力军改变,探索市场趋势在疫情影响下,机床走出了一轮新行情,同时也反映了市场…
标签: 2021-01-16机器人市场价值持续提升 中国为最大机器人研究投资国时间:2020年10月10日 机器人是“业皇冠顶端的明珠”,其研发、、应用是衡量一个国家科技创新和高端业水平的重要标志。进入21世纪以来,全球业正在向自动化、集成化、智能化和绿色化方向发展,作为智能的主力军,…
标签: 2020-12-09RAPID 程序指台与功能 ABB 机器人提供了丰富的RAPID 程序指令,方便了大家对程序的编制,同时也为复杂应用的实现提供了可能。以下就按照 RAPID 程序指令、功能的用途进行了一个分类,并对每个指令的功能作一个说明,如需对指令的使用与参数进行详细的了解,可以查看 …
标签: 2020-04-19
ABB机器人的基本认识一、机器人基本介绍1、ABB机器人示教器组成部分,共分为八部分,分别为:A连接电缆B触摸屏C急停开关D手动操作摇杆E数据备份用USB接口F使能器按钮G触摸屏用笔H示教器复位按钮 2、机器人本体介绍,本体与控制柜之间的连接主要是电动机动力电缆与转…
标签: 2020-04-19ABB机器人更换电机过程及注意事项 ABB机器人各轴的伺服电机因每台都有不同的偏移值,所以在因损坏更新后由于偏移值的改变对程序焊点位置产生影响,这时需对电机的偏移值进行人为修正补偿以直接使用原有的程序,过程如下:1. 在更换电机前,先备份原有的程序,如一台…
标签: 2020-04-19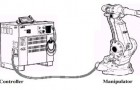
ABB机器人的组成IRB型机器人是著名的瑞典机器人生厂商ABB公司的产品,IRB指ABB标准系列机器人。IRB机器人常用于焊接、涂刷、搬运与切割。常用的型号有:IRB 1400,IRB 2400,IRB 4400,IRB 6400。其型号的解释如下:IRB指的是ABB机器人。第一位数(1,2,4,6)指机器人…
标签: 2020-04-19
近日,国家统计局发布了2020年1~2月份全国规模以上工业企业营收数据以及工业机器人相关的统计数据。据显示2020年2月工业机器人产量累计生产21292套,累计下降19.4%。同时,1~2月份,全国规模以上工业企业实现利润总额4107.0亿元,同比下降38.3%。其中,制造业实现利…
标签: 2020-04-01
工业机器人销量快速增长,国产龙头有望逐步崛起!(中泰证券)医药行业内在向好,高景气子板块相对优势突出(国泰君安)变为不变、适者生存,壁垒深厚白电龙头值得关注(申万宏源)新股发行制度渐变,或为券商带来持续业务增量(东北证券)非航业务快速扩张,这个机…
标签: 2020-04-01人机互动的接触传统的工业机器人,通常使用安全监控停止以及速度分离监控等手段,从时间和空间两个维度,将操作人员和机器人进行安全隔离。如果在同一时间和空间内,操作人员与机器人依然具有互动的需求,便可能产生直接的物理接触。这些物理接触,特别是其中
标签: 2019-10-10传感器整合拓应用领域 机器人再增十八般武艺:对于下一代机器人的发展而言,控制和通讯IC扮演重要的角色。 然而,许多全新、小型和低成本感测技术的出现及融合,才是这些现代及复杂机器人的心脏。要实现下一代机器人,有数种关键传感器技术发挥极重要的作
标签: 2019-10-10
2018年8月21-23日,中国纺织工程学会第八届纺机器材专业委员会三次会议在内蒙呼和浩特市召开。会议重点围绕纺织机械和专件器材产品质量、性能提升,搭建纺织机械企业与自动控制产品供应商、专业加工制造、高校及研究院所等单位之间的交流合作平台,
标签: 2019-10-10
目前许多制造商家使用全自动机器人替代员工完成繁琐的工作(比如装卸工件等),并重新安排这些员工去完成更有价值的工作,为工厂降低成本、提高生产效率。但是机器人的使用不仅仅局限于此,机器人与检测设备配合其应用领域更加广泛,前景更加远大。
标签: 2019-10-10
DH参数校准模块(Denavit-HartenbergModeling&Calibration) ISO9283:1998回答了如何进行机器人性能试验的问题。人们在了解到机器人的性能后,希望能够对其进行修正补偿。目前机器人领域的国外厂商都有
标签: 2019-10-10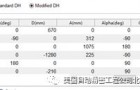
DH参数校准模块(Denavit-HartenbergModeling&Calibration)(上接)一、D-H模型背景知识和API RMS建模过程 a)、DH模型简介 Denavit 和Hartenberg这两位科学家在1955年提出一
标签: 2019-10-10
DH参数校准模块 (Denavit-HartenbergModeling&Calibration) (上接) c). DH模型补偿的基本原理 在软件中模拟机器人控制器中的DH模型后,接下来选取一系列位姿进行校准测量,如果想要获得机器人全范围
标签: 2019-10-10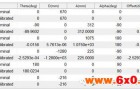
DH参数校准模块 (Denavit-HartenbergModeling&Calibration) (上接) b). 关节角θ零位误差机器人关节一般使用绝对编码器来控制关节角,机器人开机后,首先通过控制系统存储的编码器零位信息来
标签: 2019-10-10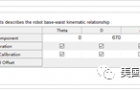
DH参数校准模块 (Denavit-HartenbergModeling&Calibration) (上接) 三、在API RMS系统中对DH参数进行标定 a). DH参数标定求解的补偿参数(变量)配置问题; 选定需要补偿的变量进行
标签: 2019-10-10
DH参数校准模块 (Denavit-HartenbergModeling&Calibration) (上接) c) 基坐标系和工具坐标系的处理; 基坐标系是机器人DH模型的起始坐标系,根据厂家的不同定义,有的可能存在明确的几何特征,
标签: 2019-10-10皮尔磁机器人的人机协作有那些分析方案? 本届工博会皮尔磁带来了机器人安全应用解决方案,使用传感器及控制技术,结合皮尔磁专业的安全理念为工博会量身打造。在现场3米x3米的区域内有一台协作型机器人,在一般模式下进行自动循环动作,周围由安全光栅、
标签: 2019-10-10
现如今很多银行大厅正在慢慢普及人工智能服务机器人,银行服务机器人凭借一系列智能产品特征,正在逐步渗透、参与到智慧银行体系建设中,成为其不可或缺的组成部分。2019年5月5日,卓富智能全新一代银行服务机器人-ALICE-PLUS正式发布上市。
标签: 2019-10-10

 QQ交流群
QQ交流群

