
通过模型控制改善机器人性能
多年以来,对机械手进行动力学建模是学术圈当中的一个已知方法。它通常被用作机器人和工程实验室的一个工具,用于研发仿真机器人与高级控制算法、运动模拟以及其他学术追求。动力学建模涉及数学公式的开发,用于描述机器人的动态特性,比如惯性、质量、重心以
标签: 2019-09-22
多年以来,对机械手进行动力学建模是学术圈当中的一个已知方法。它通常被用作机器人和工程实验室的一个工具,用于研发仿真机器人与高级控制算法、运动模拟以及其他学术追求。动力学建模涉及数学公式的开发,用于描述机器人的动态特性,比如惯性、质量、重心以
标签: 2019-09-22
在过去的半个世纪里,人们生产设计了大量的机器人[1]。机器人控制理论的发展有着巨大的进步,如PID控制、滑模控制、自适应控制、模糊控制、神经网络控制等[2-6]。工业机器人的动力学模型具有非线性和各种不确定性,如摩擦、外部扰动和负载变化等,
标签: 2019-09-22
近几年来,随着经济和电子商务的飞速发展, 网购 和 快递 已经走入了人们的日常生活中。目前,国内快递基本为人工投递,对于快递行业而言,这是严峻的考验,同时消费者也对快递行业提出了新的要求。人们关注快递的费用、运输速度和安全性等问题,并期望良
标签: 2019-09-22
机器人足球的最初想法由UniversityofBritishColumbia,Canada的AlanMackworth教授于1992年正式提出。他在OnSeeingRobots一文中以机器人足球为例,指出传统的机器人研究中存在的不足:Def
标签: 2019-09-22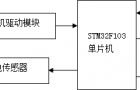
摘要:移动式机器人主要由遥控操作器、自动控制系统和传感器等三部分为移动载体而组成系统。移动式机器人的核心技术是控制系统,其中运动控制技术是关键环节。本文以移动机械手作为研究对象,设计了一种准确抓取物体的运动控制系统,利用模糊控制算法控制移动
标签: 2019-09-22
柔性臂因其质量轻、结构设计紧凑等优点被广泛应用在航天器、柔性机器人等领域,但是,其末端在运行过程中易产生抖动,严重影响其工作效率和定位精度,甚至危害整个系统的安全。国内外研究人员针对柔性臂的振动抑制问题,提出了PID控制、模糊控制、自适应控
标签: 2019-09-22
两轮移动机器人是一个强耦合、欠驱动、复杂的非线性系统,其原理类似于行走的倒立摆系统,这种系统在控制理论和实际工程中极为典型,具有很高的学术研究价值。本文针对基于陀螺效应的双飞轮移动机器人的单输入四阶非线性动力学系统的控制器进行研究。首先对双
标签: 2019-09-22
复杂的交通状况和发动机的转动带给汽车的冲击和多维振动将会严重影响车载设备的性能。车体运动带来的振动是不可能被完全消除的,因此通过隔振设备减弱振动能量从车体向车载设备的传递是最为有效的方式。车体的振动是多维的,根据隔振系统与振源自由度相一致的
标签: 2019-09-22
①焊接、搬运、上下料、包装、码垛、拆垛、检测、探伤、分类、装配、贴标、喷码、打码、(软仿型)喷涂、目标跟随、排爆等一系列工作。 ②特别适用于多品种,便批量的柔性化作业,对于稳定,提高产品质量,提高劳动生产率,改善劳动条件和产品的快速更新换代
标签: 2019-09-22工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。 6轴
标签: 2019-09-22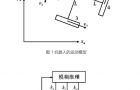
摘要:通过对足球机器人运动学模型的分析,考虑到系统的时变、非线性和干扰大等特点,以全向移动机器人为研究平台,提出一种将模糊控制与传统的PID控制相结合的方法,应用到足球机器人的运动控制系统中。针对足球机器人运动控制中的重点问题,着重提出了基
标签: 2019-09-22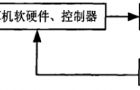
摘要:机器人运动控制是为移动机器人提供一种运动控制方式。本文通过对移动机器人的运动控制进行分析和研究,设计出以单片机为中央控制器的闭环调速的机器人伺服电机驱动控制系统,采用超声波传感器完成测距,方便和简化了机器人障碍物的距离检测。应用MAT
标签: 2019-09-22
摘要:模糊技术具有人类智能的模糊性和推理能力,在路径规划中,模糊推理的应用主要体现在基于行为的导航方式上,机器人的最终操作由高层控制机构对基本行为进行平衡后作出综合反应。模糊控制方法将信息获取和模糊推理过程有机结合,同时计算量小,构成方法较
标签: 2019-09-22
机器人在军事侦察、扫雷排险、防核化污染等危险与恶劣环境中以及工业自动化生产的物料搬运上应用很广,随着任务复杂性的增加,对移动机器人的要求也越来越智能化。然而,功能较完备的路径跟踪控制方法普遍具有计算复杂,不易实现等特点。主要针对移动机器人即
标签: 2019-09-22
摘要:为了实现SCARA机器人的高速高精度控制,将带偏心负载的SCARA机器人简化成三连杆机构,并建立机构的惯性力模型,进行辨识计算出机器人各惯性项系数的值,建立基于惯性力模型的加速度自适应控制方法,自适应计算关节一理论最大运动角加速度。通
标签: 2019-09-22
我们深知,在智能化工厂进程中准确、精细的控制可以帮助减少过程的维护时间和停工时间对于企业的成本控制和效率提高越来越重要,这就要求连接必须稳定可靠。工业自动化已经进入高进阶段,如何更好解决的自动化控制问题,TE给出最新的方案。1.工业智能:在
标签: 2019-09-22
在工业自动化控制中,我们经常会遇到开关量,数字量,模拟量,脉冲量等各种概念,对于这些概念如何理解、又是如何采集呢?本文将和大家分析一下。一、概述1、数字量很多人会将数字量与开关量混淆,也将其与模拟量混淆。数字量在时间和数量上都是离散的物理量
标签: 2019-09-22移动机器人是机器人学一个重要分支,且随着相关技术的迅速发展,它正向着智能化和多样化方向发展,应用广泛,几乎渗透所有领域。于春和采用激光雷达的方式检测道路边界,效果较好,但干扰信号很强时,就会影响检测效果。付梦印等提出以踢脚线为参考目标的导航
标签: 2019-09-22
概要在当今竞争日益激烈的全球市场中,高效的工业生产能力通常取决于每间工厂自动化系统的速度、精度和可靠度。即使是在一些低劳动力成本的地区,制造厂商们也渴望提高其自动化系统的精密度,因为他们知道,如果不这么做就会危及其在全球经济中的位置。工业自
标签: 2019-09-22
摘要:本文介绍了一种基于旋转电弧传感器的焊接机器人系统。系统采用惯量小,成本低,灵活性大的新型十字滑块系统作为机械传动机构;旋转电弧传感器的位置精度高,焊缝偏差小,使用各类焊缝类型;配合步进电机完成整个系统位移单元的传动,并进行位置伺服。环
标签: 2019-09-22

 QQ交流群
QQ交流群

