
微能变频器调试指南(级联控制1)
二、系统方案 选用深圳市微能科技有限公司研发生产的WIN-V63系列矢量控制变频器。采用高频脉冲频率给定方式实现级联控制,下面以两台变频器级联进行说明(多台级联方案与两台思路一样),接线示意图如下: 主变频的频率设定由工业设备的工艺决定
标签: 2019-09-22
二、系统方案 选用深圳市微能科技有限公司研发生产的WIN-V63系列矢量控制变频器。采用高频脉冲频率给定方式实现级联控制,下面以两台变频器级联进行说明(多台级联方案与两台思路一样),接线示意图如下: 主变频的频率设定由工业设备的工艺决定
标签: 2019-09-22
PID控制原理简单,适应性强,容易实现,是机器人控制的常用方法,PID控制系统设计的核心内容是如何确定其比例系数Kp、积分常数Ti和微分常数Td的最优解。控制参数的选定直接影响仿人机器人控制系统的响应速度、调节偏差的强度,以及控制系统的精度
标签: 2019-09-22
非线性系统在现实世界中普遍存在,可以说绝大多数系统是非线性的,例如卫星的定位与姿态控制系统、机器人控制系统、精密数控机床控制系统等等,这些都不可能采用线性模型,因此研究非线性系统的最优控制问题有重要的理论及应用价值。因为对非线性系统的最优控
标签: 2019-09-22
焊接机械手的轨迹跟踪是焊接机器人控制的难点。机械手是一个典型的非线性动力系统,具有大惯性和大延迟。目前对机械手的控制,主要采用传统PID控制。由于系统复杂性较高,设计人员为建立系统模型做出各种假设和简化,因此数学模型的控制精度会受到很大的影
标签: 2019-09-22
摘要:本次课题主要是基于ARM机械手控制系统的设计,并且还涉及到基于ARM嵌入式系统的开发和应用以及QT人机界面的设计,针对用于注塑机的三轴伺服机械手,设计其控制系统人机界面。实现对机械手运行参数的设定、运行指令的下发和运行状态的监视。系统
标签: 2019-09-22
奇瑞汽车股份有限公司是中国最大的自主品牌汽车生产商之一。目前,奇瑞公司已具备年产整车90万辆、发动机65万台和变速箱40万套的生产能力。随着生产规模不断扩大,对自动化生产线需求也越来越高,工业机器人的应用数量也越来越多。为了降低生产成本,奇
标签: 2019-09-22
SEPRO公司多年来一直希望提高其机械手的运动控制水平,他们面临的一个极富挑战性的目标是,如何在性能和精度之间寻找最佳平衡。另一个针对SEPRO的VISUAL2数控系统的目标是,如何为任意尺寸大小和有效载荷的机械手提供最佳控制。 然而,最有
标签: 2019-09-22
摘要:目的:本文采用阻抗控制的方法,将模糊PD自整定控制器运用到阻抗控制当中,并通过模糊调节器来有效的调节阻抗模型系数,实现在不确定环境下工业机器人的力/位置控制.方法:运用基于位置的阻抗控制方法,在位置控制内环,采用模糊自整定PD控制器,
标签: 2019-09-22
2010年,德国学术界和产业界提出 工业4.0 的概念,即是以智能制造为主导的第四次工业革命,或革命性的生产方法。该战略旨在通过充分利用信息通讯技术和网络空间虚拟系统 信息物理系统相结合的手段,将制造业向智能化转型。所以,近些年许多工业自动
标签: 2019-09-22
供稿:深圳博美德机器人有限公司 本文链接:https://www.chuandong.com/tech/detail.aspx?id=27779 深圳博美德机器人股份有限公司地 址:深圳市宝安福永大洋路福安第二工业城六栋二楼 电 话:075
标签: 2019-09-22
供稿:深圳博美德机器人有限公司 本文链接:https://www.chuandong.com/tech/detail.aspx?id=27781 深圳博美德机器人股份有限公司地 址:深圳市宝安福永大洋路福安第二工业城六栋二楼 电 话:075
标签: 2019-09-22博美德机器人系统可搭配独特的智能力矩控制模块,支持恒定力矩补偿,读取力矩-移动位置补偿,循环补偿等力矩控制方式,在抛光,组装等应用环境尤其适用。 博美德机器人系统采用工业现场总线(CANOpen或EtherCAT),进行全闭环控制,不同于其
标签: 2019-09-22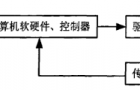
随着机器人技术的迅速发展及其在工业、军事等领域中的广泛应用,有关智能机器人的理论、设计、制造和应用的新的技术科学---机器人学,已逐渐形成,并越来越引起人们广泛的关注。智能机器人的研究将进入了一个崭新的阶段。同时,太空资源、海洋资源的开发与
标签: 2019-09-22
工业机器人的运动学控制对系统的实时性具有很高的要求,目前主流的工业机器人都是采用专门定制的运动控制卡,加上实时操作系统,这样既保证了数据的实时传输又能保证运动控制的精确执行,大大提升了整个系统的稳定性,从而提升机器人的性能。另外的一些机器人
标签: 2019-09-22
近几年来,随着机器人技术与控制技术的发展,机器人在日常生活和工农业生产中得到广泛应用。机器人对象是一个非线性、强耦合的多变量系统,在运动过程中.由于存在摩擦、负载变化等不确定因素,因而它还是一个时变系统。传统的机器人控制技术大多是基于模型的
标签: 2019-09-22
机器人的传动和布局设计从理论上讲应该是比较成熟的领域,如果有样机,拆开一看就可以知道大部分的结构。但是在结构优化设计经验、装配规范的标准化、零配件的按需定制以及供应链优化等方面国内厂商还需要很长时间的积累。 本文以KUKA为例,分协作机器人
标签: 2019-09-22
摘要:因为工业机器人应用领域的不断扩大和现代产业的快速发展,人们期望更高品质的机器人,所以对机器人的工作速度和精度要求越来越高。机器人控制技术为实现这些功能的核心,其控制问题十分复杂,而轨迹跟踪控制是工业机器人控制问题中的一个重要方面。本文
标签: 2019-09-22
随着科学技术的发展,人类的研究活动领域已由陆地扩展到海底和空间。利用移动机器人进行空间探测和开发,己成为21世纪世界各主要科技发达国家开发空间资源的主要手段之一。研究和发展月球探测移动机器人技术,对包括移动机器人在内的相关前沿技术的研究将产
标签: 2019-09-22控制器是机器人系统的核心,国外有关公司对我国实行严密封锁。近年来随着微电子技术的发展,微处理器的性能越来越高,而价格则越来越便宜,目前市场上已经出现了1-2美金的32位微处理器。 1、工业机器人控制系统硬件结构 控制器是机器人系统的核心,国
标签: 2019-09-22
合信技术多机器人协同控制方案,它由Co-Motion系统中的C37运动控制器为主控单元,它使用Cortex A8 1Ghz主频芯片,运算速度快,支持CNC功能及多种机器人算法。控制器通过EtherCAT总线通讯方式搭配合信技术新款绝对值的H
标签: 2019-09-22

 QQ交流群
QQ交流群

