

安全机器人和工业 4.0
柔性生产是工业 4.0 的一大主题。在工业生产中,柔性的自动化机器能够快速轻松地适应不断变化的生产条件,其需求量日益增长。人员应当能够不受阻碍地进入,同时免受危险。机器人的速度、力量和移动性往往离不开有效的防护措施。
随着人与机器人之间的交互愈发密切,安全解决方案将发挥关键作用:它不仅使工作环境更加安全,而且还将大幅提高生产力。这一点只能通过坚固可靠的智能传感器与安全系统所赋予的适应性环境感知能力得以实现。作为全套解决方案供应商,SICK 推出针对安全机器人应用的产品、系统和服务。

安全协作机器人应用的标准和要求
以下标准主要适用于工业机器人和机器人系统的安全性:ISO 10218-1 针对的是工业机器人制造商,而 ISO 10218-2 则面向机器人系统制造商或集成商。ISO TS 15066 技术规范为协作机器人应用设计奠定基础。
此类应用中的人机交互越密切,设计要求就越高。在这种情况下,风险降低措施的验证成本也在增加。与此同时,每项机器人应用均需执行风险评估,即使所使用的机器人具备结构性风险降低措施。

人机交互越密切,风险降低措施的验证成本就越高。
如何有效地降低人机交互的风险?
共存——联锁装置
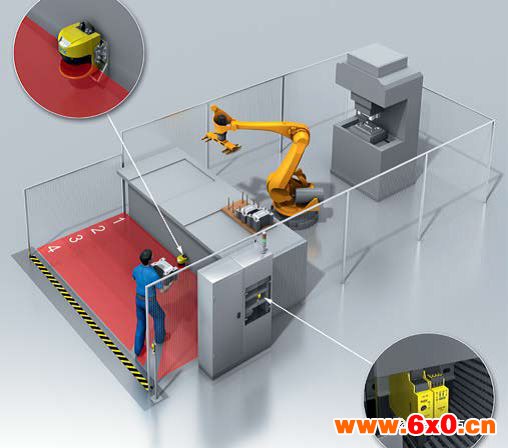
在通常不需人为干预的工业机器人应用中,操作者有时需要进入工作区域,例如进行检查或维护。此时,工作区域须使用栅栏隔开,防护门必须联锁。联锁装置须确保每当操作者进入危险区域时,机器人的相关功能都已关闭,并且当人员留在危险区域内或防护门打开时,必须保持联锁状态。


合作——SICK安全光幕/安全扫描仪
涉及操作者装载和卸载机器人单元的过程是工业机器人较常见的应用。在类似场景中,操作者和机器人在不同的时间与相同的工作区域中完成必要过程。根据装载和卸载系统的设置方式,可使用SICK安全光幕/安全扫描仪结合SICK安全控制器进行人员检测与防护。
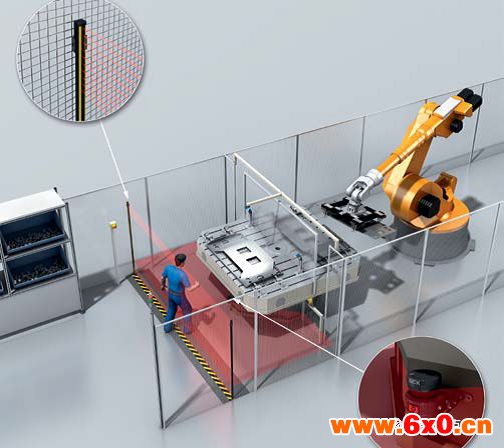
协作——安全装置、监控、检测
在特定应用中,人与机器人必须在同一工作区域中同时交互。在这种协作场景中,机器人的力量、速度和运动轨迹必须受到限制,同时根据实际风险程度进行监测与控制。
该风险程度直接取决于人与机器人之间的距离。为此需要可靠的SICK安全传感器进行人员检测。


未来,人和机器人将在需要高度灵活性的自动化应用(例如,在定制化的小批量生产)中更加紧密地工作。人工装配操作正逐渐被人机协作所取代。
ISO / TS 15066的设计原则补充了ISO 10218-1 / 2已经制定的要求,并为协作机器人应用的设计奠定了良好的基础。
西克(SICK)成立于1946年,历经多年的发展与积累,已成为极具影响力的智能传感器解决方案供应商,产品广泛应用于各行各业,包括包装、食品饮料、机床、汽车、物流、交通、钢铁、机场、电子和纺织等行业。西克中国目前已在广州、上海、北京、青岛和香港等地设有分支机构,并形成了辐射全国各主要区域的机构体系和业务网络。
如需了解更多详情,欢迎登录www.sickcn.com或拨打全国客服热线4000 121 000








 QQ交流群
QQ交流群

