
工业机器人虚拟样机系统的研究
该文提出将虚拟样机技术应用于工业机器人仿真研究过程,研究与开发工业机器人虚拟样机系统。首先说明虚拟样机技术并分析其关键技术,然后说明了工业机器人虚拟样机系统的构成与样机系统在机器人仿真研究中的研究内容。总结该项技术主要解决以下两方面的问题,
标签: 2019-09-22国网济南供电公司、国网山东省电力公司检修公司的研究人员申文伟、逯遥,在2018年第8期《电气技术》杂志上撰文指出,智能变电站的防误闭锁系统与常规变电站基本架构差异很大,目前电力运行部门关于智能变电站防误闭锁系统认知、验收、运行管理等方面的经
标签: 2019-09-22导读:我国的工业主要有轻工业以及重工业两种类别,所谓的轻工业也就是原材料的采购以及加工,而重工业则指的是化工行业。以往的工业制造都是借助手工业来完成的,因此,导致很多产品的质量很难得到保障。 1传统制造模式的缺陷 1.1生产质量低 我国的工
标签: 2019-09-22摘要:工业机器人在东莞的应用有着巨大的市场和前景,本文介绍的是一种精密型装配机器人,从它的基本构成数据通信方式、控制器等方面进行介绍,同时总结了现有技术的局限性,也对以后研究方向做了探讨。关键词:东莞;工业机器人;串行通信;控制器1 简介
标签: 2019-09-22工业机器人轴承作为工业机器人的关键配套件之一,在我国还是一个薄弱环节。现有的轴承国家标准不能满足和指导工业机器人轴承的设计、生产和检验。为了突破这一瓶颈,我公司几年来,查阅了大量的相关资料,了解了国际上著名工业机器人轴承生产企业的相关产品和
标签: 2019-09-22摘要:随着计算机技术的不断向智能化方向发展,机器人应用领域的不断扩展和深化,工业机器人已成为一种高新技术产业,为工业自动化发挥了巨大作用,将对未来生产和社会发展起越来越重要的作用。文章介绍了工业机器人的国内国外的发展状况和应用趋势,以及带来
标签: 2019-09-22
该文提出将虚拟样机技术应用于工业机器人仿真研究过程,研究与开发工业机器人虚拟样机系统。首先说明虚拟样机技术并分析其关键技术,然后说明了工业机器人虚拟样机系统的构成与样机系统在机器人仿真研究中的研究内容。总结该项技术主要解决以下两方面的问题,
标签: 2019-09-22DingDukun1,XieCunxi2 (1DepartmentofMechanicalandElectricalEngineering,DongguanPloytechnic,Dongguan523808,GuangdongProvin
标签: 2019-09-22【摘要】本文对一款可用于煤矿井下危险区域探测的搜救机器人进行研究。中国是一个矿难事故多发的国家,中国矿井地质差、高瓦斯的特点,给煤矿生产带来很多隐患。每年都有矿难事故的报道,带来很大的负面社会影响。当事故发生时,井下环境如瓦斯浓度、CO浓度
标签: 2019-09-22
机械手是能够模仿人手和手臂的功能,按固定程序抓取、搬运物件或操作工具的自动装置,它是近代自动控制领域当中出现的一项新技术,并成为现代机械制造生产系统中的一个重要的组成的部分。机械手的迅速发展是由于它的积极作用正日益为人们所认识:其一、它能部
标签: 2019-09-22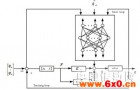
焊接机械手的轨迹跟踪是焊接机器人控制的难点。机械手是一个典型的非线性动力系统,具有大惯性和大延迟。目前对机械手的控制,主要采用传统PID控制。由于系统复杂性较高,设计人员为建立系统模型做出各种假设和简化,因此数学模型的控制精度会受到很大的影
标签: 2019-09-22
摘要:目的:本文采用阻抗控制的方法,将模糊PD自整定控制器运用到阻抗控制当中,并通过模糊调节器来有效的调节阻抗模型系数,实现在不确定环境下工业机器人的力/位置控制.方法:运用基于位置的阻抗控制方法,在位置控制内环,采用模糊自整定PD控制器,
标签: 2019-09-22
地图创建是移动机器人一个基本而且十分重要的技术,它是移动机器人在未知环境中导航定位及路径规划等技术的基础[1]。对于移动机器人地图创建这个问题我们可以这样理解:从任意时刻,任意位置开始,一个移动机器人应该能够通过所带的传感器探索环境,获取相
标签: 2019-09-22
摘要:因为工业机器人应用领域的不断扩大和现代产业的快速发展,人们期望更高品质的机器人,所以对机器人的工作速度和精度要求越来越高。机器人控制技术为实现这些功能的核心,其控制问题十分复杂,而轨迹跟踪控制是工业机器人控制问题中的一个重要方面。本文
标签: 2019-09-22
机器人的智能化经过多年的发展,已越来越贴近人类,使其成为具有人类的学习能力、运动能力、执行能力、感知能力、认知能力等的新型智能机器人是人类追求的目标,其中示教学习是研究机器人学习能力的重要分支之一,是智能型仿人机器人发展和应用的关键。因此,
标签: 2019-09-22
机械手臂作为自动化设备中的一个重要组成部分,以其操作灵活性,被广泛应用于工业生产、医疗服务、军事科技等各个方面。对于不同的工作工作环境,我们要对机械手臂的各个关节进行具体的轨迹规划,从而得到机械手臂末端的位姿,因此,对机械手臂进行精确快速的
标签: 2019-09-22
随车吊可以应用于导弹武器装备运输、导弹半自动填装系统、危险环境救援和果树农产品喷洒农药采摘等。在应用到导弹武器装备中时,导弹武器从生产到作战训练和战场运用都需要运输手段,运输方式包括船舶运输、车辆运输和人员携带等;而装备可靠性与装备运输性能
标签: 2019-09-22
抛光是零件加工的最后一个环节,材料去除量很少,抛光有电化学抛光、磁流变抛光、等离子抛光、超声波研磨抛光和机械抛光等,而机械抛光的效率最高且可控性好,本文提出基于并联机器人技术的自动抛光机床系统设计方案并研制样机,进行了抛光实验。 本文提出基
标签: 2019-09-22
抛光打磨是提高压铸件表面质量最重要的一道工序。针对工艺复杂的压铸件打磨问题,采用双机器人从工件两侧进行协同打磨,可大大提高机器人打磨效率。 目前中小企业大部分仍然采用人工打磨的方式,对工人的身心健康损害极大,少部分采用工业机器人末端执行器夹
标签: 2019-09-22
柔性臂因其质量轻、结构设计紧凑等优点被广泛应用在航天器、柔性机器人等领域,但是,其末端在运行过程中易产生抖动,严重影响其工作效率和定位精度,甚至危害整个系统的安全。国内外研究人员针对柔性臂的振动抑制问题,提出了PID控制、模糊控制、自适应控
标签: 2019-09-22
两轮移动机器人是一个强耦合、欠驱动、复杂的非线性系统,其原理类似于行走的倒立摆系统,这种系统在控制理论和实际工程中极为典型,具有很高的学术研究价值。本文针对基于陀螺效应的双飞轮移动机器人的单输入四阶非线性动力学系统的控制器进行研究。首先对双
标签: 2019-09-22

 QQ交流群
QQ交流群

