
用于行人检测的候选区域框提取方法
行人检测任务的目标是在图像中检测行人并确定行人的位置。随着人工智能技术的发展,越来越多的研究人员关注这项任务并且做了很多相关的研究工作。准确的行人检测方法可以应用于很多领域,例如智能辅助驾驶,智能视频监控和智能机器人等。 近年来,区域卷积
标签: 2019-09-22
行人检测任务的目标是在图像中检测行人并确定行人的位置。随着人工智能技术的发展,越来越多的研究人员关注这项任务并且做了很多相关的研究工作。准确的行人检测方法可以应用于很多领域,例如智能辅助驾驶,智能视频监控和智能机器人等。 近年来,区域卷积
标签: 2019-09-22
AGV的关键技术是什么?相信很多客户接触了一波AGV厂家后,仍不得要领。即使70%的AGV行业从业人员,也不能说出个所以然来。在一一例举AGV的关键技术之前,铽罗小编还是先列举我们认为最核心的两个关键技术,它们是:第一个关键技术:定位与导航
标签: 2019-09-22
如今很多的仓储物流公司都已经开始在使用AGV小车,那么AGV小车的导航方式原理是什么呢?其有什么优点呢,下面就由小编给大家普及一下这方面的知识吧。激光导航:AGV小车在行驶路径上安装精确反射板,AGV通过发射激光束,同时采集由反射板反射的激
标签: 2019-09-22
如今电商发展迅速的时代,仓库是电商企业必不可少的,像阿里巴巴那些拥有自己的大型仓库,他们也在使用AGV智能仓储机器人,然而这些机器人的工作导航原理是什么呢?下面给大家分享一下电磁导航以及磁带导航的原理以及优缺点吧:1、电磁导航电磁导航的原理
标签: 2019-09-22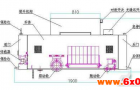
现在使用在AGV领域的导航有几种,今天嘉腾给大家介绍一下惯性导航的优缺点,以及和其他的导航的对比吧。(惯性导航工作原理图)惯性导航是不依赖外部信息以及不易受到干扰的自主式导航系统。惯性导航是AGV通过测量载体在惯性参考系的加速度,然后自动进
标签: 2019-09-22
所谓码垛是按照集成单元化思想,将物料按照一定模式堆码成垛,以便使单元化的物垛实现物料的存储、搬运、装卸、运输等物流活动。与传统的人工码垛及龙门式码垛机相比,码垛机器人因其生产效率高、占地空间小、动作灵活性大、人工劳动强度低等特点,逐渐被应用
标签: 2019-09-22
有专家指出,机器视觉将来被广泛应用于工业机器人领域,主要具有四个功能:1、引导和定位,视觉定位要求机器视觉系统能够快速准确的找到被测零件并确认其位置,上下料使用机器视觉来定位,引导机械手臂准确抓取。在半导体封装领域,设备需要根据机器视觉取得
标签: 2019-09-22
工业4.0解决方案Gulf、Oasis配合FleetManagementSystem可实现工业4.0的智能仓储及柔性物流,为原料库存区、备料库存区、制成品库存区的入库/出库提供了完美解决方案主要参数机身尺寸2500×800×1990mm(L
标签: 2019-09-22
CD纸箱制造股份公司是领先的生产化妆品精美包装的厂家;以前,在该企业中,每个班次均需要由两名工作人员专门负责将纸箱堆放到货盘上。这项工作相当紧张,因为每个班次内必须传送多达3000个平均重量为7kg的纸箱。为减轻工作人员的负担,该公司希望找
标签: 2019-09-22
工业4.0时代,仓储移动机器人将率先开启智慧物流大时代在工业4.0的推动下,智慧仓储与智慧物流作为其核心组成部分正在逐步渗透至各行各业,其中,仓储移动机器人如果发展到高级阶段,则可实现整个物流中心库区的无人化,提高物流效率,降低人力成本,促
标签: 2019-09-22公司简介贝加莱(B R)是一家自动化技术领域的全球性领导厂商,总部位于奥地利Eggelsberg,于1979年由ErwinBernecker先生和JosefRainer先生共同创建。经过30多年的发展,今天,B R已经在全球68个国家拥有1
标签: 2019-09-22随着‘智能制造’潮流的兴起,企业对工业机器人需求量增大,在仓储物流过程中运用机器人的案例也日益增多。如果说智能仓储系统是实现智能物流的基础之一,而从物流运输上打造一个完善的智能物流信息系统,实现信息的共享则是“基础的基础”。大族机器人中的“
标签: 2019-09-22由于城市用电负荷的快速增长,对供电可靠性提出了越来越高的要求;与此同时,城市规划建设和市容美观,也逐渐受到社会的关注。传统的城市配电网才采用架空线路,施工难度较大,容易发生危机人身安全的断导线、漏电等事故;并且时常发生私拉乱扯的情况,容易影
标签: 2019-09-22
工业自动化的市场竞争压力日益加剧,客户在生产中要求更高的效率,以降低价格,提高质量。如今让机器仍编程在新产品之始花费时间检测或试运行是行不通的,因为这意味着要停止现有的生产以对新的或修改的部件进行编程。ABB的RobotStudio是建立在
标签: 2019-09-22
机器人在军事侦察、扫雷排险、防核化污染等危险与恶劣环境中以及工业自动化生产的物料搬运上应用很广,随着任务复杂性的增加,对移动机器人的要求也越来越智能化。然而,功能较完备的路径跟踪控制方法普遍具有计算复杂,不易实现等特点。主要针对移动机器人即
标签: 2019-09-22
摘要:为了实现SCARA机器人的高速高精度控制,将带偏心负载的SCARA机器人简化成三连杆机构,并建立机构的惯性力模型,进行辨识计算出机器人各惯性项系数的值,建立基于惯性力模型的加速度自适应控制方法,自适应计算关节一理论最大运动角加速度。通
标签: 2019-09-22
我们深知,在智能化工厂进程中准确、精细的控制可以帮助减少过程的维护时间和停工时间对于企业的成本控制和效率提高越来越重要,这就要求连接必须稳定可靠。工业自动化已经进入高进阶段,如何更好解决的自动化控制问题,TE给出最新的方案。1.工业智能:在
标签: 2019-09-22
在工业自动化控制中,我们经常会遇到开关量,数字量,模拟量,脉冲量等各种概念,对于这些概念如何理解、又是如何采集呢?本文将和大家分析一下。一、概述1、数字量很多人会将数字量与开关量混淆,也将其与模拟量混淆。数字量在时间和数量上都是离散的物理量
标签: 2019-09-22随着现代科学技术的发展,PLC己广泛地应用于工业控制微型计算机中。 目前,工业机器人关节主要是采用交流伺服系统进行控制,本研究将技术成熟、编程方便、可靠性高、体积小的SIEMENSS-200可编程控制器,应用于可控环流可逆调系统,研制出机器
标签: 2019-09-22移动机器人是机器人学一个重要分支,且随着相关技术的迅速发展,它正向着智能化和多样化方向发展,应用广泛,几乎渗透所有领域。于春和采用激光雷达的方式检测道路边界,效果较好,但干扰信号很强时,就会影响检测效果。付梦印等提出以踢脚线为参考目标的导航
标签: 2019-09-22

 QQ交流群
QQ交流群

