
艾而特:多摩川伺服电机原理
伺服 词源于希腊语 奴隶 的意思。人们想把 伺服机构 当个得心应手的驯服工具,服从控制信号的要求而动作。在讯号来到之前,转子静止不动;讯号来到之后,转子立即转动;当讯号消失,转子能即时自行停转。由于它的 伺服 性能,因此而得名 伺服系统。
标签: 2019-09-26
伺服 词源于希腊语 奴隶 的意思。人们想把 伺服机构 当个得心应手的驯服工具,服从控制信号的要求而动作。在讯号来到之前,转子静止不动;讯号来到之后,转子立即转动;当讯号消失,转子能即时自行停转。由于它的 伺服 性能,因此而得名 伺服系统。
标签: 2019-09-26
步进、伺服电机主要用于精确定位场合,也都可以用于调速应用。步进电机因效率低,一般不做为动力用;因存在一定的转矩脉动,不推荐用于转矩控制。伺服系统则可以做转矩控制,还可考虑取代变频驱动当动力用。 步进电机做调速应用时,控制指令通常用脉冲指令,
标签: 2019-09-26
故障原因:①电源未通(至少两相未通);②熔丝熔断(至少两相熔断);③过流继电器调得过小;④控制设备接线错误。 故障排除:①检查电源回路开关,熔丝、接线盒处是否有断点,修复;②检查熔丝型号、熔断原因,换新熔丝;③调节继电器整定值与电动机配合;
标签: 2019-09-26
电动代替液压,伺服电动缸取代液压系统 用于全自动工件成型、压制或自动化装配越来越多地采用机电一体化驱动技术。对用户而言,除显著降低运行成本外,无级调节特性也是首要的决定性优势。Ortlieb精密设备公司将如SICKStegmann的SKS3
标签: 2019-09-26
在越来越多的高标准工业自动化应用领域,技术的进步正在改变步进电机和伺服电机之间的性能-成本比。 在采用了闭环技术后,成本更低的步进电机正在逐渐渗透到原本被高成本伺服电机所支配的应用领域。 步进电机与伺服电机 根据传统的观念,在需要速度超过8
标签: 2019-09-26两相混合式步进电机步距角一般为3.6°、1.8°,五相混合式步进电机步距角一般为0.72°、0.36°。也有一些高性能的步进电机步距角更小。如四通公司生产的一种用于慢走丝线切割机床的步进电机,其步距角为0.09°;德国百格拉公司(BERGE
标签: 2019-09-26
当前在机器人的反应速度、精度上,国内外产品还是存在一定差距的。解决这一问题的关键在于机器人的核心零部件——伺服电机。当前国内机器人发展迅猛,尤其是工业机器人领域。但在机器人的反应速度、精度上,国内外产品还是存在一定差距的,那么关键点是在哪呢
标签: 2019-09-26交流伺服电机定子的构造基本上与电容分相式单相异步电动机相似.其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流伺服电动机又称两个伺服电动机。 交流伺服电机的
标签: 2019-09-26
伺服系统是数控装置和机床主机的联系环节,它用于接收数控装置插补器发出的进给脉冲或进给位移量信息,经过一定的信号转换和电压、功率放大,由伺服电机带动传动机构,最后转化为机床工作台相对于刀具的直线位移或回转位移。 为了提高数控机床的性能,对机
标签: 2019-09-26速度就是金钱,尤其对于要进行连续物料加工、印刷和卷料输送等生产过程的制造商来说更是如此。借助罗克韦尔自动化的新一代AllenBradleyKinetixVPC伺服电机,制造商能够以更快速度和更大扭矩运行机器,显著提高机器吞吐量。 “Kine
标签: 2019-09-26工业机器人有4大组成部分,分别为本体、伺服、减速器和控制器。工业机器人电动伺服系统的一般结构为三个闭环控制,即电流环、速度环和位置环。一般情况下,对于交流伺服驱动器,可通过对其内部功能参数进行人工设定而实现位置控制、速度控制、转矩控制等多种
标签: 2019-09-26
随着伺服电机技术的飞速发展,数控机床、工业机器人、自动化生产设备开始广泛使用伺服电机作为运动控制的关键零部件,自然而然对伺服电机的性能要求也越来越高,尤其是其动态特性,此时传统测功机已然无法实现相关测试,于是行业内亟需能够提供高性能伺服电机
标签: 2019-09-26近些年来,有目共睹的是:人民生活水平在日益的提高,消费也在不断的攀升,随着认知度以及对自身生活品质的要求不断被提到日程上,消费者不仅对内在物质的品质提出了要求,还在包装上也提出了相应的要求,这就使得生产厂商不得不将自己的生产设备更新换代,以
标签: 2019-09-26JC35导读:伺服电机控制技术的发展推动加工技术的高速高精化。80年代以来,数控系统逐渐应用伺服电机作为驱动器件。交流伺服电机内是无刷结构,几乎不需维修,体积相对较小,有利于转速和功率的提高。 目前交流伺服系统已在很大范围内取代了直流伺服系
标签: 2019-09-26工业机器人电动伺服系统的一般结构为三个闭环控制,即电流环、速度环和位置环。一般情况下,对于交流伺服驱动器,可通过对其内部功能参数进行人工设定而实现位置控制、速度控制、转矩控制等多种功能。 那么关于伺服电机有哪些需要知道的呢?下面小编总结了伺
标签: 2019-09-26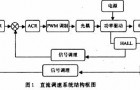
直流伺服电机具有响应快、低速平稳性好、调速范围宽等特点,因而常常用于实现精密调速和位置控制的随动系统中,在工业、国防和民用等领域内得到广泛应用,特别是在火炮稳定系统、舰载平台、雷达天线、机器人控制等场合。尽管交流伺服电机的发展相当迅速,但在
标签: 2019-09-26
步进电机主要是依相数来做分类,而其中又以二相、五相步进电机为目前市场上所广泛采用。二相步进电机每转最细可分割为400等分,五相则可分割为1000等分,所以表现出来的特性以五相步进电机较佳、加减速时间较短、动态惯性较低。 二相/五相步进电机差
标签: 2019-09-26在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。 在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。一般来说,
标签: 2019-09-26伺服电机(servomotor)是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动
标签: 2019-09-26电机伺服控制三种模式的选择方法,一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。想知道的就是这三种控制方式具体根据什么来选择的?速度控制和转矩控制都是用模拟量来控制的。位置控制是通过发脉冲来控制的。 如何选择控制方式?
标签: 2019-09-26

 QQ交流群
QQ交流群

