

1 引言
电动机作为拖动机械广泛应用于工矿企业、交通运输,国防工业等领域中。电动机在直接起动时瞬时冲击电流很大,在电动机经常起动的情况下过大的电流会造成电动机严重发热,缩短电动机的使用寿命,另外还会对电网造成不良影响,影响电网供电和同一电网上的其它负载[1,2]。随着电力电子技术的快速发展,采用晶闸管为主电路元件,单片机为控制核心的智能型起动设备完成电动机的起动过程已成为现实。针对传统电动机软启动器由于PID初始参数选取不当或工作工程中受外界环境影响而发生漂移从而影响控制精度的问题,本文研究了一种将模糊自整定PID(FSA-PID)代替传统PID应用于电动机软起动器设计中的策略。将模糊控制思想与常规PID控制器相结合,吸收了模糊控制与常规PID控制两者的优点。主要用于解决传统方法难以解决的控制对象参数在大范围变化的问题,比常规PID控制器控制性能好,可靠性更高。介绍了模糊自整定PID原理、软启动器原理和系统的软、硬件设计过程。最后通过计算机仿真实现了电动机软启动器的工作过程,结果证明了所提出的策略的正确性和有效性。
2 软启动器模糊自整定PID控制原理
2.1 FSA-PID控制策略
以常规PID控制为基础,采用模糊推理思想根据不同的E 和EC对PID参数进行在线自整定[3]。按这种思想构成的控制系统由两部分组成。即常规PID控制部分与模糊推理的参数校正部分。如图1所示。
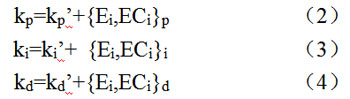
图1 FSA-PID控制系统框图
PID控制作用可用以下位置式算式来描述:
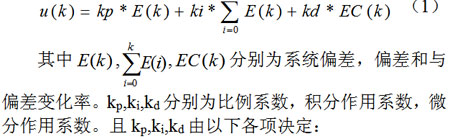
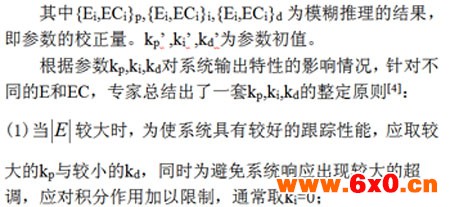
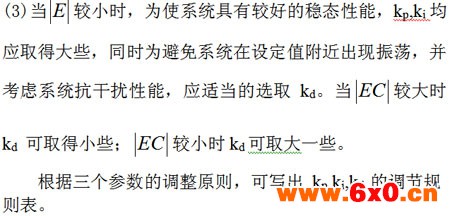
表1 Kp调节规则表
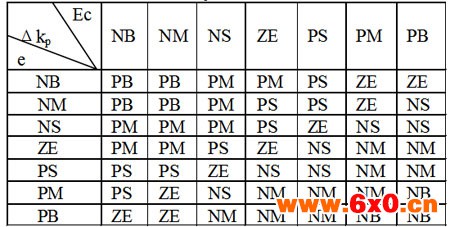
表2 Ki调节规则表
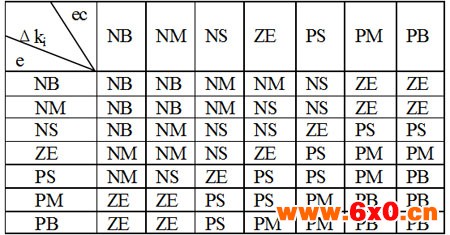
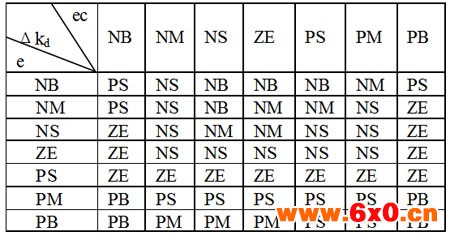
表3 Kd调节规则表
以电动机输出电流与期望电流值之差E及其变化率EC作为输入变量,以晶闸管触发角的变化Δα作为输出变量,经过模糊控制器对输入信息进行模糊化、模糊推理、模糊决策和清晰化,从而得到控制量,施加于被控电机实现软启动的全过程。
2.2 模糊控制参数选择
2.2.1 论域、隶属函数、控制规则的确定
模糊软启动器的输入E、EC与输出U可划分为五个模糊子集,即{NB,NS,ZR,PS,PB}。E、EC的论域为[-6,6],U的论域为[-3,3]。除了ZR的隶属函数选三角形隶属函数以外,其余均选梯形隶属函数。模糊控制器输出曲面图如下所示,从规则曲面图可以看出曲面比较光滑且由高至低覆盖了论域所有范围,规则设计的比较合理。
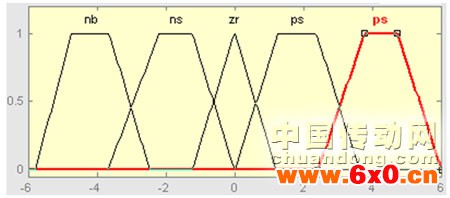
图2 输入E与EC的隶属度函数
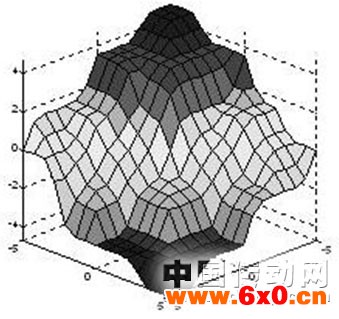
图3 Kp输出曲面图
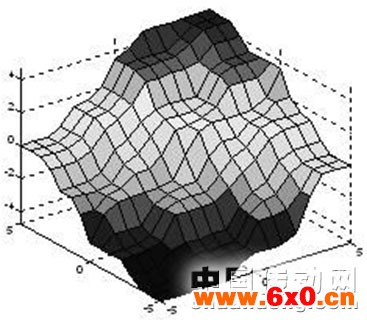
图4 Ki输出曲面图
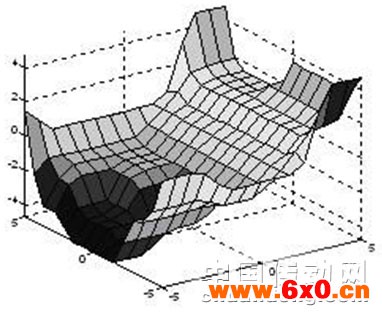
图5 Kd输出曲面图
2.2.2 输入、输出比例因子的确定
假设某类型电动机参数为Pe=7.5kw,Ie=15A,ne=3000r/min,f=50Hz ,Y接。电流误差的实际变化范围[-10A,10A]。若设定的起动电流为额定电流2倍,即30A。则相对值论域为[-1/3,1/3]。为使其转换至整数论域[-6,6],需Ke=6/(1/3)=18。同理,偏差变化率实际变化范围[-8A,8A]时可确定Kec =22.6。触发角α的实际变化范围[-20o,20o],为转换至[-3,3]需Ku=20/3=6.7。同理,还可以确定出被控量为电压时的Ke’、Kec’、Ku’的值。
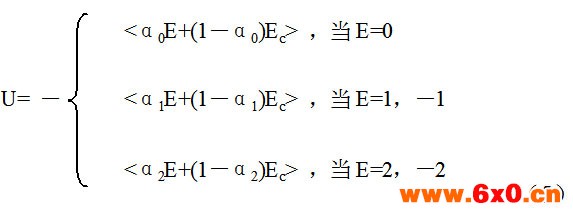
2.3 模糊决策
从节约单片机内存资源的角度出发,本文不采用存控制表格的方式,而是采用在线计算控制量的解析法。选用多修正因子法,如下式所示。其中α0=0.4,α1=0.6,α2=0.75。计算时NB,NS,ZR,PS,PB的取值分别对应-2,-1,0,1,2。
3 软启动器的软、硬件实现
如图6所示,采用三相平衡调压式主回路,它利用晶闸管的开关特性将三对反并联的晶闸管串接于电动机的三相回路上,用单片机控制其触发角的大小,改变晶闸管的开通程度,进而改变电动机起动电压的大小,控制电动机的起动特性。当起动完成后,程序控制将真空接触器闭合,短接所有晶闸管,使电动机直接投网运行,以避免在元件上的持续损耗。
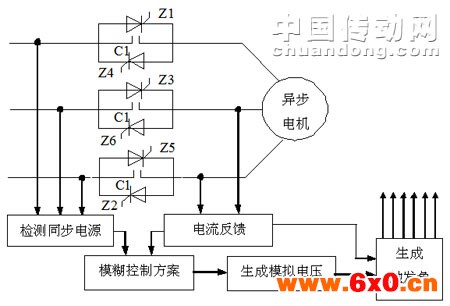
图6 软启动器硬件结构框图
控制系统的硬件由AT89C52单片机系统、电压同步信号采样及处理电路、电流检测电路、脉冲触发电路等组成。由同步变压器来的电压信号经电压比较器、光电隔离及功率驱动后送入AT89C52外部中断。电流检测电路以电流互感器测出电动机的实际工作电流,经整流、滤波、放大、A/D转换及光电隔离后送入单片机,用软件对其非线性进行补偿,以此电流信号作为计算晶闸管导通角大小的依据,并用于故障检测及数码管显示。系统的软件流程图如图7所示。
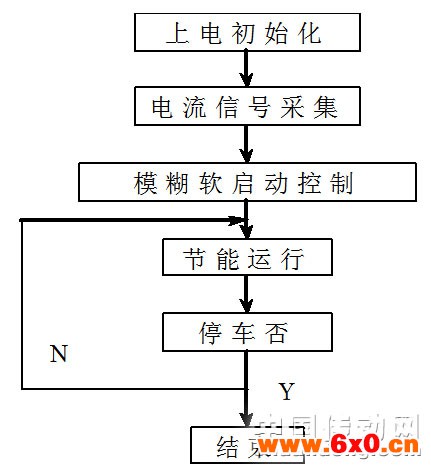
图7 软启动器软件流程图
4仿真结果与分析
控制系统的计算机仿真是应用现代科学手段对控制系统进行科学研究的十分重要的手段之一。MATLAB载[5]软件应该说是仿真软件中的佼佼者,它以功能强大、操作简单等特点受到广大科研人员的青睐。本文采用MATLAB语言编程对软启动器中的FSA-PID算法进行仿真研究。
按编程顺序,仿真程序主要由五个部分组成。
1) 仿真模型和仿真初值的给定部分
2) 语言变量及其隶属函数定义部分
3) 规则列表矩阵定义部分
4) 仿真计算部分
5) 仿真图形的输出部分
仿真结果如图8所示。整个过程分为软启动、平稳运行和软停车三个阶段。由图可见,与常规PID控制相比,模糊软启动过程响应快、超调小,对电网冲击小,不会造成大的电压降落,保证了电网电压的稳定,可提高供电设备的使用寿命。在接到停车指令后模糊控制均使输出电流按设定电流变化,一直到完全停车,晶闸管全部关断,具有更好的跟踪性能。
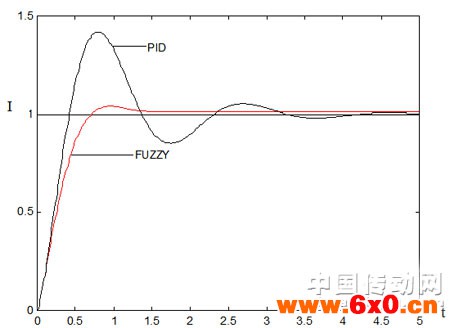
图8 软启动全过程仿真结果
5 结论
本文尝试将模糊自整定PID控制策略应用到电动机软启动器的设计中,使控制器智能化,使系统鲁棒性增强,从而解决电动机起、停过程中电流、转矩对电机本身的机械冲击及对电网的负面影响等问题载。仿真结果表明了该策略的正确性,进一步拓宽了模糊控制的应用领域。
参考文献
[1] 王艳杰, 曾毅, 吕凤. 基于ATmega128的智能软启动器的设计. 自动化技术与应用, 2010(2):72-75.
[2] 周俊. 基于DSP的三相异步电机智能软起动器. 浙江大学硕士学位论文, 2006.
[3] 余永权,曾碧.单片机模糊逻辑控制.北京航空航天大学出版社,1995.
[4] 毛盾,郭丙君. 基于模糊PID控制的Cuk变换器研究,2010(3):1-3.
[5] 楼顺天,胡昌华,张伟.基于MATLAB的系统分析与设计——模糊系统.西安电子科技大学出版社, 2001.
作者简介:
赵启迪,1992年生,沈阳理工大学信息学院在读本科生,测控技术与仪器专业,研究兴趣为智能检测与控制。邮箱:yusongh@126.com
作者简介:
赵启迪,1992年生,沈阳理工大学信息学院在读本科生,测控技术与仪器专业,研究兴趣为智能检测与控制。邮箱:yusongh@126.com








 QQ交流群
QQ交流群

