

摘要:本文以数字电感转换器(LDC)作为探测模块,选择ATmega328单片机作为系统的主控制器,并且阐述了精准控制的步进电机的工作原理。编写程序控制代码,同时结合XY轴机械结构本文通过比较分析,选择数字电感转换器(LDC)作为探测模块,完成了结构简单,成本低廉的金属探测器的设计,该探测器灵敏度高,探测准确。
引言
随着科技水平的蓬勃发展,金属探测器的功能也随之增加。金属探测器的发展经历了好几次科学技术的革新,从开始的信号模拟技术,到今天使用的数字脉冲技术,都让金属探测器无论是灵敏度、分辨率、还是探测的精确度上都有了质一样的飞跃。本课题所研究的基于多普勒效应的金属探测器属于微波检测型金属探测器,具有结构简单、重量轻等特点,而且其体积、重量和制造成本不会随被检测物品体积的增大而快速增加,可以以较低的成本制作出轻便易用的金属探测器,具有广阔的应用前景。
1金属探测器设计模块
1.1系统总体模块介绍
整个系统模块如图1所示,主要分成主控制模块(MCU),电源模块,金属探测模块,电机驱动模块和电机定位模块这五大部分组成。为了使自主运动模块不能互相干扰,数据传输不能紊乱,我们利用主从控制结构来分别处理两主数据,通过中断控制,实现联动控制。速度块,影响小。
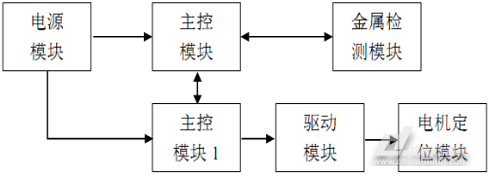
图1系统总体模块图
1.2主控模块介绍
主控模块以ATmega328单片机为核心,该单片机的核心是将32个工作寄存器和丰富的指令集联结在一起,所有的工作寄存器都与ALU(算术逻辑单元)直接相连,实现了在一个时钟周期内执行的一条指令同时访问(读写)两个独立寄存器的操作。这种结构提高了代码效率,使得大部分指令的执行时间仅为一个时钟周期。因此,ATmega328可以达到接近1MIPS/MHz的性能,运行速度比普通CISC单片机高出10倍。具有速度快,操作简便快捷等特点。
1.3金属探测模块介绍
本文采用的基于数字电感转换器(LDC)的金属探测模块。数字电感转换器利用PCB线圈或自制线圈可以实现非接触式电感线圈检测,通过分析待测金属物体对电感线圈磁场的影响可以很方便地实现金属检测。对LDC检测到数据进行分析处理后驱动电机运动,从而实现被测金属物体的精确定位。充分利用LDC在微距检测和精确定位方面的优势,实现了快速、精确、高效的金属物体定位。达到了低成本,自动化水平高的功能。
1.4定位模块介绍
本文采用简易的XY轴滑台进行定位,整体结构如图2所示。
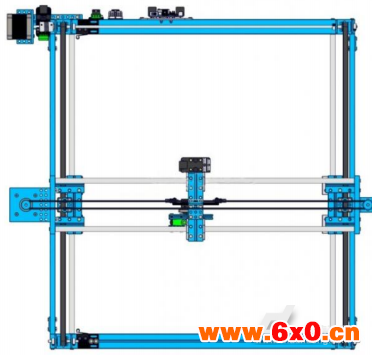
图2XY轴滑台
上述装置在金属探测的过程中,金属探测器在X轴的皮带的带动下完成水平方向
的扫描。通过步进电机控制Y轴方向的皮带,在金属探测器完成上一次X轴的扫描后,
向前移动一段距离,再进行X轴的扫描。从而完成了整个区域的扫描。此方案中金属
探测器是逐步扫描没有盲区,不会因为电机的抖动而产生偏移,因此能满足设计的精度
要求。
2 步进电机的工作原理及其驱动

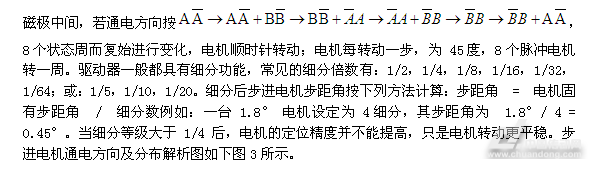
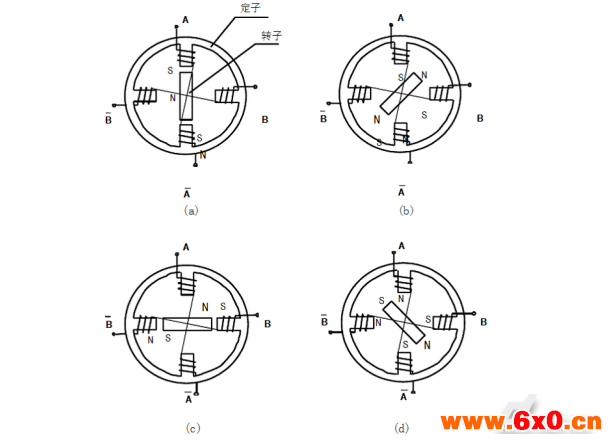
图3步进电机细分解析图
2.2电机驱动的设计
本文采用A3967SLB,PWM恒流控制的微步距驱动二相步进电机专用驱动器。A3967SLB是一个完善的微电机驱动器内置逻辑器。它的设计操作双极步进电机全,半,季,和第八步模式,输出驱动能力30V和±750毫安性。它的特点是有固定关断时间的电流调节器,有能力在慢,快,或混合电流衰减模式。此电流衰减控制方案以减少可听到的电流噪音,增加步进精确度,并减少功耗。同时它可通过“步进”输入中输入一个脉冲电动机将产生一个步骤即根据输入,产生全,半,四分之一,或八分脉冲。基于A3967驱动芯片的细分断路器能为两级步进电机提供大约每相750mA的驱动。它一般设置为8步细分模式,控制步进电机转动,其驱动原理图图4所示。
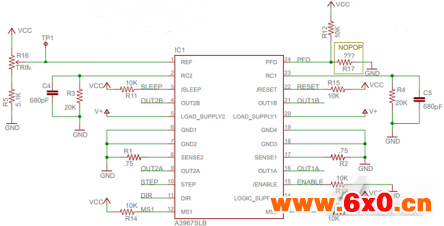
图4电机驱动原理图
3 系统软件程序设计
3.1金属检测器主程序流程图
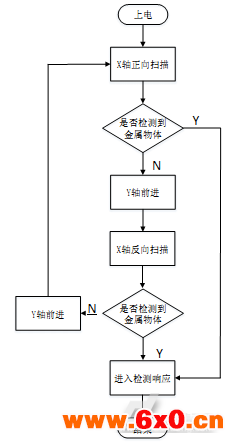
图5探测程序流程图
图5是程序的流程图,当系统接入电源启动后程序进入运行状态。,X轴的传送皮带开始进行横向扫描,如果在扫描过程中检测到了目标物体即直接停止运行进入检测响应阶段,如果没有检测到目标物体则Y轴的传送皮带开始运行向前走一小步后,X轴传送皮带开始反向运行,再次进行检测判断,如果检测到如果检测到目标物体则进入检测响应阶段,若没有检测到目标物,则Y轴的传送皮继续向前走一小步,X轴的传送皮带开始新的扫描,一直到检测到目标物体或者扫描完整片区域后停止。
3.2电机驱动模块程序设计
由于机械结构的限制,XY轴滑台只能在50cm*50cm的范围内滑动。而步进电机在
控制的过程中是记录脉冲个数,通过测试记录完成一个轴的脉冲个数是32000个脉冲,
步进电机走一步是1600个脉冲故完成一个轴需要20步。由于探测器线圈有2.5CM故
可以将其分为20等分每次步进电机向前走一步即可完成整个区域的扫描。
3.3金属探测模块程序设计
通过试验检测金属时线圈获取的脉冲峰值如图6,设置金属判断阈值,对探测器
检测到到的探测信号判断对比。待检测物体有一角硬币、一元硬币和直径为4cm的铁
丝圈。一元和一角硬币是相比铁丝圈而言是比较容易定位的
,对于一元硬币和一角硬币,金属探测模块的采集到的信号的是一个幅值较高的脉冲信号,并且检测测线圈经过硬币中心时返回的脉冲幅值最大如图5.4中第一副为1角硬币脉冲图第二幅为一元硬币的脉冲图,第三幅是铁圈的脉冲图。程序通过判断检测到的峰值数据与阀值对比即可判断是否为金属,进一步通过测试确定不同金属的阀值即可判断金属的区别。

图6金属检测脉冲图
4 金属探测器测试结果及分析
4.1时间测试结果及分析
对于该设计,需要测试的有两个方面,金属探测器的探测时间与精度。首先探测时间是从金属探测器开始运行到检测到目标物体所用的时间。要考虑到最极端的情况及目标物体与探测器的起点在对角线的两个角上,此时用的时间是最长的。测试结果的完整性对于检测时间,由于测试的时候考虑的是最恶劣的情况,其实只需要测试探测模块扫描整个XY轴滑台的时间,因此可以在玻璃板下放置金属物体。表1所示的是金属探测模块分别从四个角出发,扫描整个XY轴滑台所需要的时间。
表1金属探测模块扫描XY轴滑台时间
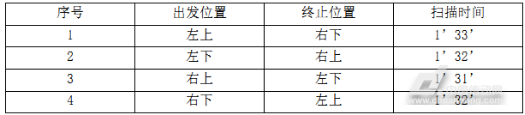
由于自制机械结构材质偏软无法保证完全垂直,故在扫描过程中两端不能完全的同步移动导致时间有些许误差。不同的对角线扫描也存在细微的误差,但是并不影响对检测时间的测试。通过对上表数据分析,证明系统方案的扫描时间满足设计的要求。
4.1精度测试结果及分析
就检测精度而言,一元和一角硬币需要检测到硬币的边沿内即可,因此目测就可以
断定定位的精度是否达到要求。同铁环只需要与标记位置对应即可,故同样的使用目测
即可判断是否到达要求。如表5.2所示,是不用物体的精度探测结果。
表2精度探测测试结果
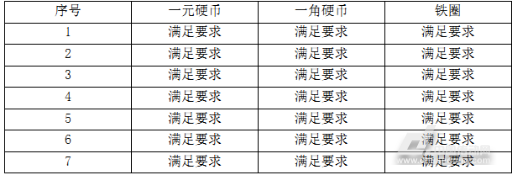
根据上述的数据分析,系统的检测时间和探测精度均能满足设计的要求。误差主要来自
于机械结构中的机械摩擦,但系统完成时间都在设计范围内,数据组几次测试精度也符合设计要求。因此设计满足要求。
5 设计实物图及其说明

图7金属探测器实物图
本文设计采用电感感测技术,该技术是金属探测技术中最常用的一种遥控的、短程感测技术,该技术使在导体目标在低成本,高分辨率感测,这使得它在恶劣的环境极为可靠的灰尘,污垢,油脂和湿气的环境中。它可以通过使用印刷电路板的感测元件的线圈,以达到超低成本的系统解决方案来创建。电感感测技术可实现线性/角位置、位移、运动、压缩、振动、金属成分以及市面上包括汽车、消费类、计算机、工业用、医疗用和通信应用在内的很多其它应用的高精度测量。
结束语
本文从电感感测技术的现状、电感数字转换器、步进电机发展、步进电机细分原理
以及细分技术应用方面进行了介绍。
本论文主要工作有:
(1)对电感感测技术的发展以及现状做出概述以及分析;
(2)对目前的数字电感转换器(LDC)进行分析,并对其他传感器与电磁传感器的
优缺比较,对比它的稳定性,灵活性,解析其原理与内部结构以及模块的设计原理
(3)对步进电机的发展以及现状做出概述以及分析,以及步进控制细分的原理
(4)最后通关单片机控制联结步进电机与LDC模块完成金属探测装置的设计。









 QQ交流群
QQ交流群

