

引言
飞行器仿真转台是一种通过伺服控制并且需要高精度控制系统的重要实验仿真设备,它可仿真模拟飞机空中飞行状态和动作,如:俯仰、滚转和偏航。飞行器仿真转台实际上是一种将电信号转换到机械运动的设备。但如何提高飞行器仿真转台的动态性能一直是这一领域研究的热点问。我国对飞行仿真转台的研究开始于20世纪中期,主要分布于航天、兵器、航空、船舶等相关领域。在新产品的研制开发过程中发挥着重要作用,随着目前计算机技术的迅速发展和伺服技术的广泛应用,在高精度三轴飞行仿真转台中实现伺服控制已成为可能。
近几年以来,国际上对多速率采样理论的分析研究已经取得了很大的进步,并为离散控制系统的前馈控制分析研究开辟了广阔的研究空间。H.Fujimoto(日本学者)曾提出采用多速率采样系统实现对指令完全跟踪的控制方案,此控制方案的核心是将SISO的被控对象通过MIMO的状态方程描述出来,从而构造出被控对象状态的传递函数矩阵来。该方法的提出目前逐渐成为此领域的研究热点。目前国际上对该方案在单相逆变器、基于视觉的伺服控制、永磁同步电机谐波电流抑制、交流伺服等相关领域的研究上取得了很大进步,而我国对该方案的研究才刚刚起步。
转台作为飞行仿真器和导航测试主要组成部分,为使飞行仿真器具有更高的精度,提高转台的精度是必不可少。但目前对飞行器转台的研究还存在很多的制约因素,如:无法准确确定被控对象、现有控制理论的局限性、外界干扰因素等。但其中最主要的因素之一就是被控对象的不确定性。由于在实际应用是系统比较复杂,又无法建立比较完善的建模理论,因此,无法精确的建立被控对象的数学模型。在对控制系统进行建模时,往往采用低阶模型代替高阶模型,用线性模型代替非线性模型。由于环境因素不确定,往往使得被控对象与所建立的数学模型间存在差异。目前,随着自动化控制技术的不断发展和完善,航空、航天领域对飞行器仿真转台的精度和响应频率等技术参数的要求也越来越高,给转台的制造和控制水平提出了新的挑战,也给伺服控制系统提出了更高的要求。
1、飞行器仿真转台控制系统介绍
飞行仿真转台主要由外框、中框和内框三部分组成,如图1所示为某型号的三轴飞行仿真转台示意图,中框和内框都采用闭合式结构,外框采用音叉式结构,内中外三框采用伺服电机进行驱动可进行连续旋转。将陀螺仪和导引头等传感器安装在内框上用于感应飞机的飞行姿态和角运动,其传感器和控制器的I/O信号通过导电环从底座引出,从而将各种姿态采集到的信号转化为转台的机械转动。外中内三框分别表示的物理意义为:外框表示飞机偏离航线、中框表示飞机俯仰、内框表示飞机滚转,三个框同时进行动作就可仿真出飞行在三维空间的真实姿态。
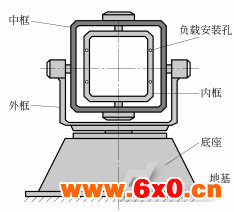
图1某型号的三轴飞行仿真转台示意图
本系统的驱动部分主要是外框、中框和内框分别采用伺服电机进行驱动,伺服电机都由各自的伺服控制器进行电机动作的控制。三框还分别安装了一个感应同步器和一个测速机,用以监测仿真转台的旋转角位置和角速度。
转台的内中外三个框架在控制上是相互独立的,因此本控制系统采用如图2所示的方案。该控制方案采用上位机和下位机相结合的控制方式。采用一台计算机作为上位机,实时对伺服控制系统进行监控和管理。下位机则用于对三个通道的执行机构进行直接控制。因为每个通道控制回路的物理结构是相同的,所以三个通道之间的控制关系为并行关系。
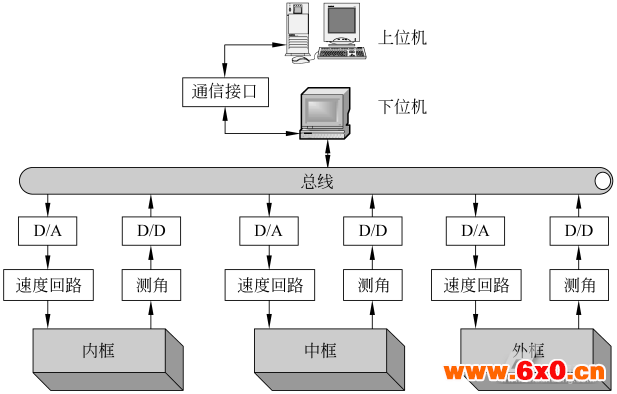
图2飞行器仿真转台系统总体控制结构图
上位机的操作面板用于设置系统的工作状态,并且将工作状态的相关信息在上位机进行显示。上位机在将设置的指令传送给下位机,上位机与下位机之间采用总线方式进行数据交换。下位机可将实时根据采集到的反馈信号,依据编写的控制程序算法,换算出输出量,然后通过数字量/模拟量输出,经控制器控制电机,从而实现飞行器转台的实时控制。
2、转台数学模型建立
因为转台的内中外三个框架在控制方式上是相互独立的,因此可分别对单个框架进行控制系统的设计[6]。以下所建立的飞行器仿真转台的数学建模:
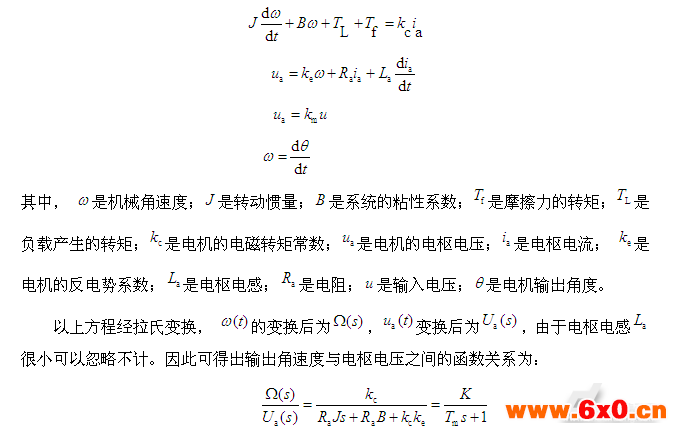
本控制系统为保证控制系统的静态精度和稳定性,并且使控制系统具有良好的动态性能和对外界扰动的调节能力,依次采用了设计位置环、速度环和电流环对输出进行控制。
3.1电流环设计
采用电流环负反馈可允许电机具有过载能力,也可限制最大电流值,从而对电机得快速起动或制动起到保护作用。
3.2速度环设计
速度环设计是位置控制系统中必不可少的一个环节,可以保证速度回路的静态精度。本系统采用测速机作为速度反馈元件,从而构成速度反馈环。
3,3位置环设计
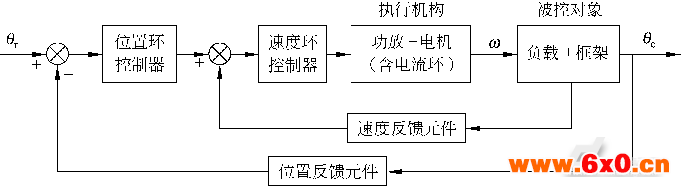
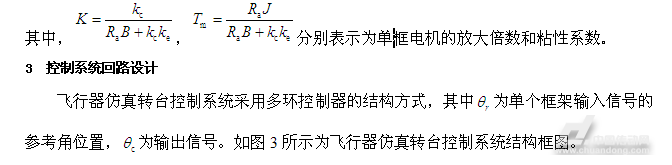
图3飞行器仿真转台控制系统结构框图
本系统的位置环控制系统由:速度环、PWM、力矩电机和测速机等组成。因位置环控制器为数字式控制器,因此可通过计算机来实现。当控制系统在进行速度跟踪控制时,只有精确的位置信号,但没有准确的测速元件,因此只能通过位置信号差分的方法来得到速度信号,然后再进行位置闭环控制,通过位置环的精度来控制速度环的精度。
4、控制系统仿真
本控制系统是针对三轴飞行器仿真转台进行设计的,其中内框采用PID方式进行控制。为了是控制系统具有良好的动态精度,对输入信号进行微分补偿,从而构成了对PID进行前馈复合控制。如图4所示为在MATLAB/Simulink软件中建立的飞行器仿真转台伺服系统仿真图。
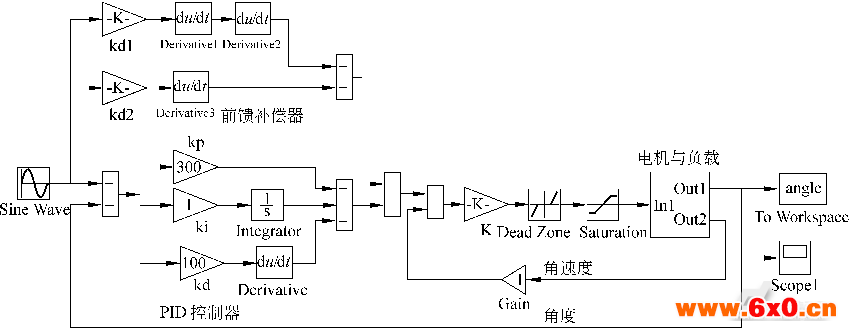
图4飞行器仿真转台伺服系统仿真图
本控制系统中设定定时中断为1ms,采集数据间隔为1ms,并在内框中增加30公斤的负载。采用PID前馈复合控制,分别设定输入位置命令为0.5度,输入信号频率为1.5Hz正弦信号,设定输入位置指令为1o、输入信号频率为2Hz正弦信号,通过运行仿真软件可以得到如图5所示的输入信号与转动角度的仿真效果(图中X轴单位为o,Y轴单位为s)。
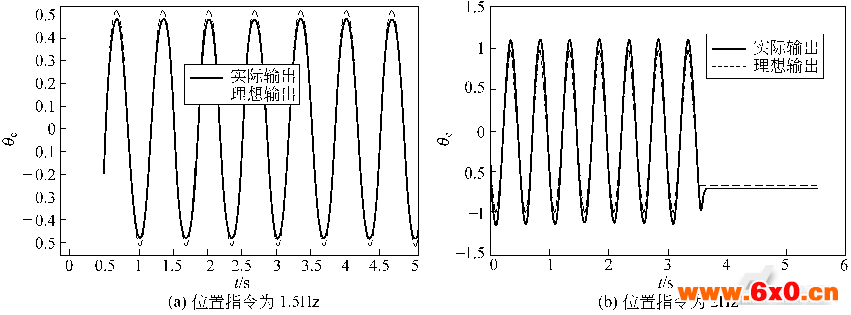
图5飞行器模拟转台PID前馈复合控制仿真图
通过仿真图可以看出,加入PID前馈的复合控制非常符合理想输出,从而证实了本控制系统的可应用性。
5、结论
本文对飞行器仿真转台的总体控制方案进行介绍,并搭建了单框转台的数学模型,对转台的控制器进行了设计方法的介绍,并对控制方案的稳定性和精度问题进行了分析。通过MATLAB仿真平台搭建了控制系统的仿真模型,采用算例模拟仿真输入信号,为仿真模型发送固定频率信号和位置指令,并对仿真结果进行了分析。通过实验结果证明了该控制方案的有效性。









 QQ交流群
QQ交流群

