

引言
据统计,目前我国在用的抽油机保有量在20多万台以上,且正以每年约1.5万台的速度增加,“抽油机”配用的电机平均功率在40KW左右,绝大多数抽油机仍采用游梁式结构,此结构特点是简单、可靠,但整机的效率和功率因数比较低,能耗也较大,一年耗电多达150亿度以上,因此石油工业作为产能大户,同时也是是耗能大户。我国是贫油国,主要是以水换油,以电换油,抽油机的耗电费用占到采油总成本的30%至45%,因此国家对于抽油机的节能控制器开发工作十分重视,因此抽油机降低能耗、提高效率的新型节能型抽油设备将成为将来抽油机生产行业的发展趋势和目标。
目前国内的长冲程抽油机大多采用开关磁阻电机,因开关磁阻电机具有磁路大饱和,双凸极结构和开关控制方式导致了其高度的非线性等特性。但是由于开关磁阻电机的非线性比较严重并且变参数、变结构的特点,因此采用常规固定参数的PID控制器是很难达得理想的控制性能,控制参数因其无法精确的建立数学模型也很难以得到确定。为适应开关磁阻电机具有的非线性特点,采用变参数的模糊控制策略。将人工神经网络与模糊控制相结合,充分发挥了神经网络的自适应性、自学习能力和非线性映射能力形成一种自适应能力很强的参数可调的模糊神经网络控制策略。
模糊神经网络(Fuzzynetwork-FNN)是模糊控制理论和神经网络控制理论相结合的产物,它包含了模糊理论和神经网络的诸多优点,是集学习、联想、识别、信息处理于一体控制方式。模糊控制是目前工程领域应用较多的一种智能控制方法,它主要是把人手动控制的经验转化成为控制的策略,因此不需要建立被控对象精确的数学模型,并且其动态品质优于普通的控制方法。但是由于普通的模糊控制器实质上是一中PD调节器,静态性能不好,并存在静差,为了解决这一问题,本文提出了模糊控制和神经网络控制相结合的控制方法,并加入积分环节用于克服静态静差
1、抽油机开关磁阻电机工作原理
目前,新型的长冲程抽油机大多采用开关磁阻电机(SRM)作为其动力元件。工作原理是通过减速齿轮带动驱动轮,然后通过钢丝绳驱动配重箱和抽油杆下降和上升来抽汲油液,此结构将有效的简化了传动结构,提高整体效率,并为抽油机的节能提供了可能性。长冲程抽油机结构框图如图1。

图1长冲程抽油机结构框图
三相开关磁阻电机定子和转子都采用双凸极结构,定子极上有集中的绕组,并且对应的磁极绕组之间相互串联,转子没有绕组,也没有永磁体,因此形成了A、B、C三相绕组。当三个绕组中某一相的绕组通电时,就会产生一个使邻近转子极与该绕组轴线相重合的电磁转矩,并按顺序对三相的绕组进行通电,就会带动转子连续的转动。通过改变绕组的通电次序,可以改变电机的转向;通过控制通电通断时间和电流大小,可改变开关磁阻电机的速度和转矩。
长冲程抽油机开关磁阻电机的调速系统主要由控制器、功率变换器和SRM电机等机构构成,本文所设计的控制器采用双闭环控制(如图2所示),内环是转矩控制,外环是速度控制,其中速度环的主要作用是对电机速度进行控制,并得到转矩内环的参考转矩。
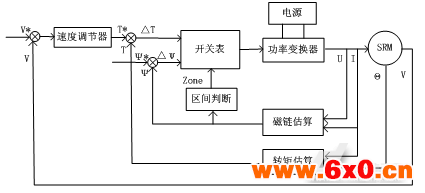
图2开关磁阻电机调速系统结构图
2、模糊速度调节器设计
模糊控制和神经网络复合控制是在模糊控制的基础上加入了神经网络的作用,如图3所示模糊控制器结构图,给定速度与检测速度的误差e=V*-V及误差变化率de作为系统的输入变量,系统的输出值是转矩内环的参考转矩,由此就构成单输出-两输入的模糊控制器。由于输入量在进行模糊化时,模糊控制器会将某些值比较小的误差近似为0,因此会出现控制的盲区,很难达到很好的控制精度,系统会一直存在静态静差。所以本文设计的系统在速度误差比较小的时刻切换到神经网络控制。为了对模糊控制盲区进行有效的控制,本系统还加入了积分环节。两种控制方式的切换条件由速度误差的大小确定。
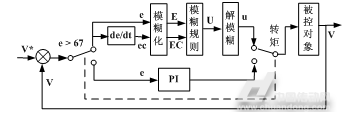
图3模糊控制器结构图
2.1模糊控制规则
根据人工手动操作的经验,控制规则可以用语言的形式表示为以下几段:
<1>如果抽油机电机的转速高于1000r/min,应减少参考的转矩。当电机的转速高出的越多,电机的参考转矩就应减少的越多。
<2>如果抽油机电机的转速等于1000r/min,电机的参考转矩保持不变。
<3>如果抽油机电机转速低于1000r/min,应增加电机的参考转矩。若电机转速越低,则电机的参考转矩增加的越多。
可用下面的控制规则表表示出来以上语言的控制规则,如表1所示。
表1模糊控制规则表
| E EC | NB | NM | NS | ZE | PS | PM | PB |
| NB | NB | NB | NB | NB | NM | NS | ZE |
| NM | NB | NB | NB | NM | NS | ZE | PS |
| NS | NB | NB | NM | NS | ZE | PS | PM |
| ZE | NB | NM | NS | ZE | PS | PM | PB |
| PS | NB | NS | ZE | PS | PM | PB | PB |
| PM | NB | ZE | PS | PM | PB | PB | PB |
| PB | ZE | PS | PM | PB | PB | PB | PB |
在表1模糊控制规则表中,每一行和每一列的交叉点是一条模糊规则可表示为“IfAiAndBj,thenCij”(其中Ai、Bj、Cij分别表示E、EC和U所对应的语言值)。
2.2模糊推理与模糊判决
本文的模糊推理采用Mamdani的推理方法,输出信息的模糊判决采用“重心法”的方式,也叫“加权平均法”:
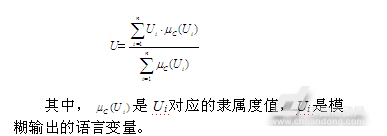
为达到实际控制过程中快速性能的要求,一般都采用离线计算的方式[5],把输入的数据离散化后,再进行模糊的推理、合成和判决等,进行离线化计算后,把模糊判决的结果统计成如表2所示的模糊控制决策表,供实时处理时应用。
表2模糊控制决策表
| E EC | -6 | -5 | -4 | -3 | -2 | -1 | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| -6 | -6 | -6 | -6 | -6 | -6 | -6 | -6 | -5 | -4 | -3 | -2 | -1 | 0 |
| -5 | -6 | -6 | -6 | -6 | -6 | -5.5 | -5 | -4 | -3 | -2 | -1 | 0 | 1 |
| -4 | -6 | -6 | -6 | -6 | -6 | -5 | -4 | -3 | -2 | -1 | 0 | 1 | 2 |
| -3 | -6 | -6 | -6 | -5.5 | -5 | -4 | -3 | -2 | -1 | 0 | 1 | 2 | 3 |
| -2 | -6 | -6 | -6 | -5 | -4 | -3 | -2 | -1 | 0 | 1 | 2 | 3 | 4 |
| -1 | -6 | -5.5 | -5 | -4 | -3 | -2 | -1 | 0 | 1 | 2 | 3 | 4 | 5 |
| 0 | -6 | -5 | -4 | -3 | -2 | -1 | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| 1 | -6 | -4.5 | -3 | -2 | -1 | 0 | 1 | 2 | 3 | 4 | 5 | 5.5 | 6 |
| 2 | -6 | -4 | -2 | -1 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 6 | 6 |
| 3 | -6 | -3.5 | -1 | 0 | 1 | 2 | 3 | 4 | 5 | 5.5 | 6 | 6 | 6 |
| 4 | -6 | -3 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 6 | 6 | 6 | 6 |
| 5 | -3 | -1 | 1 | 2 | 3 | 4 | 5 | 5.5 | 6 | 6 | 6 | 6 | 6 |
| 6 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 6 | 6 | 6 | 6 | 6 | 6 |
3.3模糊神经网络复合控制仿真实现

由此可见,当系统的速度误差为67r/min时,模糊控制器将认为系统偏差为0,不再进行调节,因此会造成系统存在很大的静态误差。所以,本文把模糊控制与神经网络控制器相结合,充分发挥模糊控制与神经网络控制的特点。
模糊神经网络控制的MATLAB仿真结构图如图4所示,用开关来进行模糊控制与神经网络控制之间的切换,当系统速度误差大于67r/min时,通过开关选择采用模糊控制方法进行控制,神经网络控制不起作用;当系统速度误差小于67r/min时,通过开关选择神经网络调节器进行控制。这样既可对控制中存在的盲区进行了控制,也可为控制系统加入了积分控制器的作用,能够有效的消除系统静态误差,并且切换开关也起到了延迟积分作用,可有效减少系统的超调量。
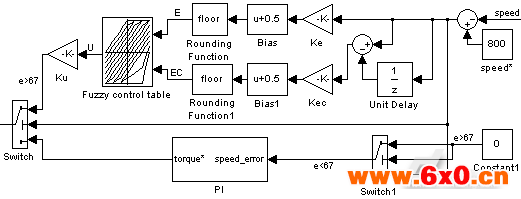
图4模糊神经网络控制器的MATLAB结构图
3、仿真结果及分析
三相的开关磁阻电机,设定电机转速800r/min,当电机进入匀速运行时,在0.4s时刻加入大小等于12N.m的负载,并在0.75s时间卸掉负载,并要求电机在此阶段的运转速度一直稳定在800r/min。为了直观的与其它的控制器进行比较,仿真时同时对三台速度控制器分别采用普通PI控制、模糊控制和模糊神经网络控制复合控制的方法进行比较,系统速度响应曲线如图5所示(图5中实线是模糊控制方法的系统速度响应曲线;点线是普通PI控制方法的系统速度响应曲线;虚线是模糊神经网络控制方法的系统速度响应曲线)。系统的局部速度响应曲线如图6所示。
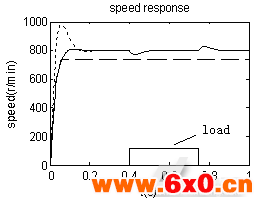
图5速度响应曲线
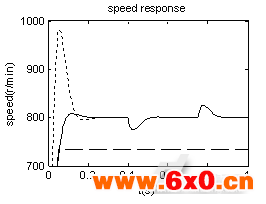
图6局部速度响应曲线
经过理论计算可以得到各种控制方法的动态和静态的性能指标如下表3所示:
|
| PI | 模糊 | 模糊神经 |
| Tr (s) | 0.02 | 0.1 | 0.07 |
| σ (%) | 27.3 | 1.2 | -8.4 |
| ess(r/min) | 0 | 0 | 67 |
表3各控制方法的动静态性能指标
从图5和表3中可以看出:模糊神经网络控制具有很强的抗干扰能力,并且系统稳定无静态误差。模糊神经网络控制能够解决普通单一调节器调节时间与超调之间的矛盾,动态和静态性能指标都优于单一的调节器。
本文所采用的调速系统内环采用的直接转矩控制原理能够对电机转矩进行直接的控制,给定磁链为0.4Wb,系统的输出转矩曲线如图7所示,转矩的波动仅为
N.m,有效的减少了转矩的波动。(由于开关磁阻电机的摩擦系数为0.02N.m.s,所以输出的转矩应该大于负载的转矩
1.67N.m。)
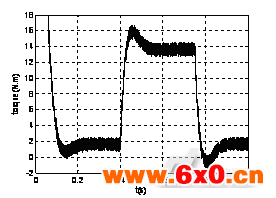
图7转矩曲线
4、结论
模糊控制通过把人们的手动控制经验转化语音控制策略,使用语言方法进行控制,不需要精确的数学模型,并且动态响应的品质优于常规的控制方式。抽油机开关磁阻伺服电机是非线性十分严重的系统,因此电机的数学模型很难精确的建立,所以采用模糊控制对开关磁阻电机进行控制是个很好的选择。但是模糊控制在控制策略上存在静态误差的问题,会对恒值系统的内外部干扰基本无抵抗的能力。所以本文采用了模糊控制,在速度误差过大的时候采用单一的模糊控制方式,此方式能够很好的解决响应时间与超调之间的矛盾问题,使系统的动态和静态性能也得到改良,并保证了系统运行中的抗干扰能力。
更多资讯请关注电机频道









 QQ交流群
QQ交流群

