

步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。

主要分类
步进电机从其结构形式上可分为反应式步进电机(VariableReluctance,VR)、永磁式步进电机PermanentMagnet,PM)、混合式步进电机(HybridStepping,HS)、单相步进电机、平面步进电机等多种类型。
接线方式
四线引出与六线引出的区别在于与驱动器连接的灵活性上。两相四线的步进电机只能用双极性的驱动器。
两相六线的步进电机既可以用双极性的驱动器也可以用单极性的驱动器。
下面以几个图说明一下两相六线引出的接法区别
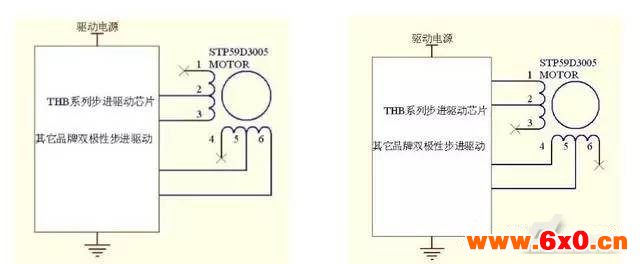
与双极性驱动器连接。图中的中心抽头2和5空着不接,只接两端引出线。实际就是将每组的两个相线圈串联起来使用,电机堵转矩大和效率高些,但是高速性能差。低速大力矩应用优先考虑的接法。不过要注意实际工作时的最大电流要小于额定电流,大概是0.7倍左右。例如额定电流是3A,按图中的接法实际工作电流应该设定在2.1A左右。
上图两种接是是一样的效果,抽头与一端连接,另一端空着不接入。这种接法电机高速性能好些,但是每相有一组线圈空闲,堵转矩小和效率低些;适合应用在工作速度相对高的场合优先考虑。这两种接法的最大工作电流就是电机的额定电流。
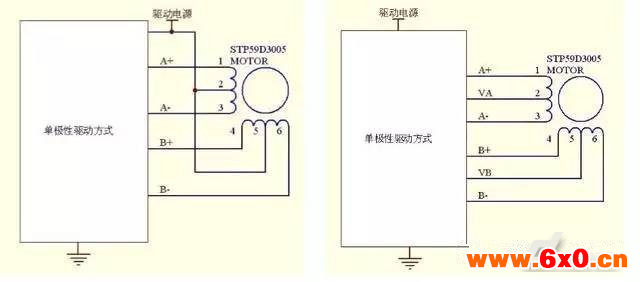
上面两种是与单极性驱动器的连接。两种单极性驱动的接法对电机来说都是一样的,区别在于驱动内部的处理有分别。单极性驱动方式的电源利用率相比双极性驱动方式的要低。电机最大的工作电流与电机标称的额定电流是一样的。
更多资讯请关注电机频道








 QQ交流群
QQ交流群

