

步进电机是将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机是一种感应电机,它的工作原理是利用电子电路,将直流电变成分时供电的,多相时序控制电流,用这种电流为步进电机供电,步进电机才能正常工作,驱动器就是为步进电机分时供电的,多相时序控制器。
步进电机S型曲线加减速算法与实现
S型曲线的的方程
,在[-5,5]的图形如下图所示:
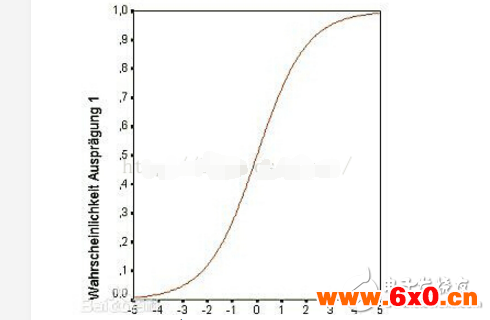
如要将此曲线应用在步进电机的加、减速过程中,需要将方程在XY坐标系进行平移,同时对曲线进行拉升变化:

其中的A分量在y方向进行平移,B分量在y方向进行拉伸,ax+b分量在x方向进行平移和拉伸。
项目中加速过程:从5600Hz加速到64000Hz,采用4细分。输出比较模块所用的定时器驱动频率为10M,采用1000个点进行加速处理。最终根据项目的需要,在加速过程中采用的曲线方程为:
 。
。
其中的Fcurrent为length(1000)个点中的单个频率值。Fmin起始频率为5600;Fmax为最大频率64000;-flexible*(i-num)/num是对S型曲线进行拉伸变化,其中flexible代表S曲线区间(越大代表压缩的最厉害,中间(x坐标0点周围)加速度越大;越小越接近匀加速。理想的S曲线的取值为4-6),i是在循环计算过程中的索引,从0开始,num为length/2大小(这样可以使得S曲线对称)。在项目中i的区间[0,1000),num=1000/2=500。这些参数均可以修改。提供的计算接口如下。
对应的计算接口code:
voidCalculateSModelLine(floatfre[],unsignedshortperiod[],floatlen,floatfre_max,floatfre_min,floatflexible)
{
inti=0;
floatdeno;
floatmelo;
floatdelt=fre_max-fre_min;
for(;i《len;i++)
{
melo=flexible*(i-len/2)/(len/2);
deno=1.0/(1+expf(-melo));//expfisalibraryfunctionofexponential(e)
fre[i]=delt*deno+fre_min;
period[i]=(unsignedshort)(10000000.0/fre[i]);//10000000isthetimerdriverfrequency
}
return;
}
//startmovemotor
voidStartPWM()
{
DriverMotorFlag=TRUE;
Index=0;
MOTOR_EN_DISABLE=ENABLE;
OpenOC4(OC_ON|OC_TIMER_MODE16|OC_TIMER3_SRC|OC_PWM_FAULT_PIN_DISABLE,0,0);
//maprc13tooc4output
RPC13R=11;
//50percentduty
OC4RS=OC_PERIOD_MIN/2;
OpenTimer3(T3_ON|T3_PS_1_8,OC_PERIOD_MIN);
INTSetVectorPriority(INT_TIMER_3_VECTOR,INT_PRIORITY_LEVEL_6);
INTSetVectorSubPriority(INT_TIMER_3_VECTOR,INT_SUB_PRIORITY_LEVEL_1);
EnableIntT3;
}
//stopmotor,hereisnodeceleration
voidStopPWM()
{
DriverMotorFlag=FALSE;
Index=0;
MOTOR_EN_DISABLE=DISENABLE;
OpenOC4(OC_OFF|OC_TIMER_MODE16|OC_TIMER3_SRC|OC_PWM_FAULT_PIN_DISABLE,0,0);
//maprc13tooc4output
RPC13R=0;
PORTCbits.RC13=0;
CloseTimer3();
DisableIntT3;
}
//changethetimerPeriodvalueinthecorrespondtimerratherthantheotherplace,Orthemotorwillbestalledoccasionally.
//刚开始我在另外的一个定时器中断中每隔1ms改变应用在OC模块的timer3的Period值,结构偶发的造成电机在加速过程中堵转。其实应该是在timer3的中断中修改。
staticunsignedshortCountForAcc=0;
void__ISR(_TIMER_3_VECTOR,ipl6)Timer3OutHandler(void)
{
//cleartheinterruptflag,ortheinterruptwillnotoccuragain.
mT3ClearIntFlag();
if(CountForAcc++》2)//herecanadjustthetotallytimeofacceleration
{
CountForAcc=0;
//if(DriverMotorFlag==TRUE&&PR3》OC_PERIOD_MAX+SPEED_STEP)
if(DriverMotorFlag==TRUE&&Index《ACC_TIMES)
{
PR3=Period[Index++];
OC4RS=PR3/2;
}
}
}
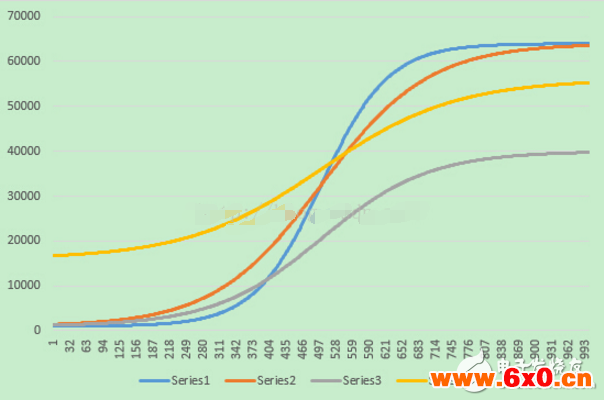
通过CalculateSModelLine接口得到如下不同的几条加速曲线:
黄色:CalculateSModelLine(Freq,Period,1000,56000,16000,4);
橙色:CalculateSModelLine(Freq,Period,1000,64000,500,8);
蓝色:CalculateSModelLine(Freq,Period,1000,64000,500,15);
灰色:CalculateSModelLine(Freq,Period,1000,40000,500,5);
最后可以估算加速过程的时间和角位移,以橙色曲线为例:CalculateSModelLine(Freq,Period,1000,64000,500,8)为例(假设在中断中没有if(CountForAcc++》2)条件限制):
时间:Period第一个点的值为10000000/500=20000,最后也点的值10000000/64000=156,平均值为10000左右,timer中断的平均时间Tn=10000/10000000=1ms,1000个点,总时间为1s,当然,起始频率大加速时间就越短,比如Fmin=16000Hz,Fmax=64000,则40ms左右即可完成加速过程。
角位移:1.8(单步)*1000(步数)/4(细分)=450°
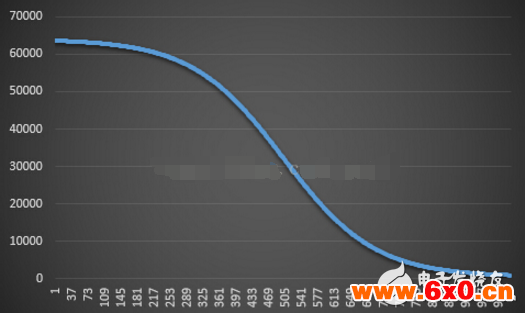
上述为加速过程,减速同样的道理,只要将方程改为:

可以得到减速曲线如下所示:








 QQ交流群
QQ交流群

