

随着电力电子技术以及新型永磁材料的发展,直流电机以其良好的线性特性以及优异的控制性能等特点,在多数变速运动控制和闭环伺服控制系统(如机器人、精密机床、汽车电子、家用电器以及工业过程等)领域中得到了广泛的应用。
目前,直流电机控制数字化已成为主流趋势,而高性能的电机控制算法多数是通过主控芯片实现的,随着高速度、多功能的数字信号处理器(DSP)的出现,使得更复杂的电机控制策略得以实现。本文以TMS320F28335为主控芯片、IRF530为驱动芯片、IR2110为驱动控制芯片对直流电机进行了H桥驱动控制设计,该控制达到了很好的效果,具有较高使用价值。
1、直流电机驱动原理
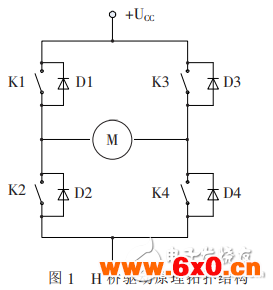
直流电机的驱动方式很多,现成的驱动芯片有33886、L298N以及TB6539等,这些芯片都是基于H桥原理进行控制的。如果设计一些大功率的驱动,只能用分立元件自行搭接H桥驱动。H桥驱动电路能方便地实现电机的4象限运行,其原理拓扑结构如图1所示。组成H桥驱动电路的4只开关管工作在开关状态,K1、K4为一组,K2、K3为一组,两组开关管工作状态互补。当K1、K4导通且K2、K3截止时,电机两端加正向电压实现电机的正转;当K2、K3导通且K1、K4截止时,电机两端加反向电压实现电机的反转。实际控制中,电机可以在4个象限之间切换运行。电路中的4个二极管D1~D4为续流二极管,用来保护开关元件。
2、硬件电路设计
硬件电路设计的整体思路是:用PWM波控制图1中开关K1、K4以及K2、K3通断的方式来控制电机的正反转,通过改变PWM波的占空比使电机得到不同的电压,从而控制电机的速度。
2.1、开关元件的选择
开关元件可选择双极型晶体管或场效应管,由于功率场效应管是电压控制型元件,具有输入阻抗大、开关速度快、无二次击穿等特点,能满足高速开关动作的需求。本文设计中4个开关均选用IR公司的N沟道增强型功率MOSFET管IRF530,其漏极电流为14A,并可以承受49A的单脉冲电流,最大电压100V,其导通电阻不大于0.16Ω,满足驱动要求。
2.2、MOSFET栅极驱动器件的选择
IR公司提供了多种桥式驱动集成电路芯片,典型产品为IR2110。该芯片是一种双通道、栅极驱动、高压高速功率器件的单片式集成驱动模块,由于芯片中采用了高度集成的电平转换技术,大大简化了功率器件对逻辑电路的控制要求,同时提高了驱动电路的可靠性。尤其是上管采用外部自举电容上电,使得驱动电源数目较其他IC驱动大大减少。本次设计采用IR公司的IR2110作为驱动芯片。
IR2110工作频率可达500kHz,逻辑电源电压范围为5V~15V,其浮置电源采用自举电路,功率端驱动电压最大可达500V,容许逻辑电路参考地与功率电路参考地之间有±5V的偏移量,其逻辑端和功率端使用单个15V电源即可工作,简化了设计。IR2110典型应用电路图如图2所示。
图2中的C1、C3和C4均为各电源与地之间的电容,其作用是利用电容的储能防止电压有大的波动,一般根据具体情况取10μF~100μF(本文设计选用10μF);R1和R2取值均为1k?赘。C2为自举电容,VCC经D1、C2、负载、T2给C2充电,以确保在T2关闭、T1导通时,T1管的栅极靠C2上足够的储能来驱动。自举电容一般选用1.0μF,具体与PWM的频率有关,频率低时,选用大电容;频率高时,选择较小的电容,本设计选用1.0μF电解电容。需要说明的是,若自举电容取值不合适,将导致不能自举,具体容量算法可参考参考文献。
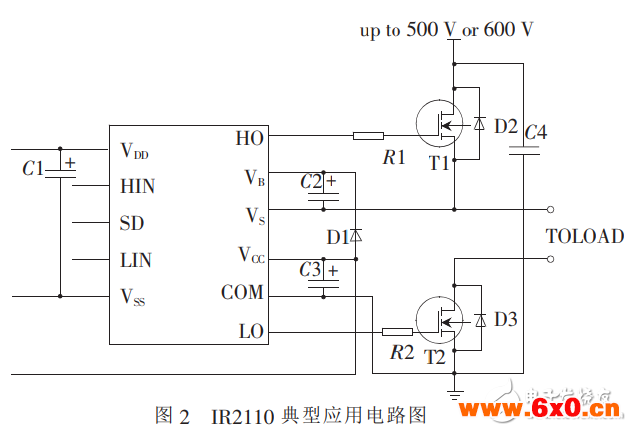
图2中的D1为保护二极管,其作用是防止T1导通时高电压串入VCC端损坏该驱动芯片。D1应选用快速恢复二极管,且导通电阻要小,以减少充电时间,如1N4148、FR系列或MUR系列等,本设计选用1N4148。
2.3、开关频率的选择
PWM波的频率将影响到电机能否输出最大转矩以及转矩的平稳性,这里主要考虑最大转矩。要得到最大的输出转矩,必须知道转子磁极的方向,即确定转子的位置,这对本设计的小型直流电机来说可暂不考虑。为了避免电机发出比较大的噪声,应尽可能让PWM波频率在声波范围之外;另一方面,由于电机绕组的感性性质,频率越高感抗越大,高的频率会使电机的转矩变小[9]。经分析比较,本文最终确定的电机频率为250Hz,虽然有一定的低频噪声,但输出转矩效果很好。
2.4、控制器的选择
目前,PWM波的产生有多种方式,可以用专门的PWM波产生芯片产生,也可由微控制器(如单片机、ARM、DSP、FPGA等)产生。本文微控制器选用了TI公司TMS320F28335型DSP,它是整个控制系统的核心部分,其性能在一定程度上决定了整个硬件系统的稳定性。TMS320F28335为32bit浮点型DSP,其工作主频达150MHz,有12路PWM输出,其中6路是高精度PWM波通道,非常适合电机控制。
2.5、驱动控制电路整体设计
根据以上关键部件的选择,设计得到图3所示的驱动控制硬件电路图。
PWM波由DSP的PWM产生,然后通过180欧电阻R5送至光耦TLP521。由于本设计的PWM波频率不高,普通光耦TLP521已满足要求。
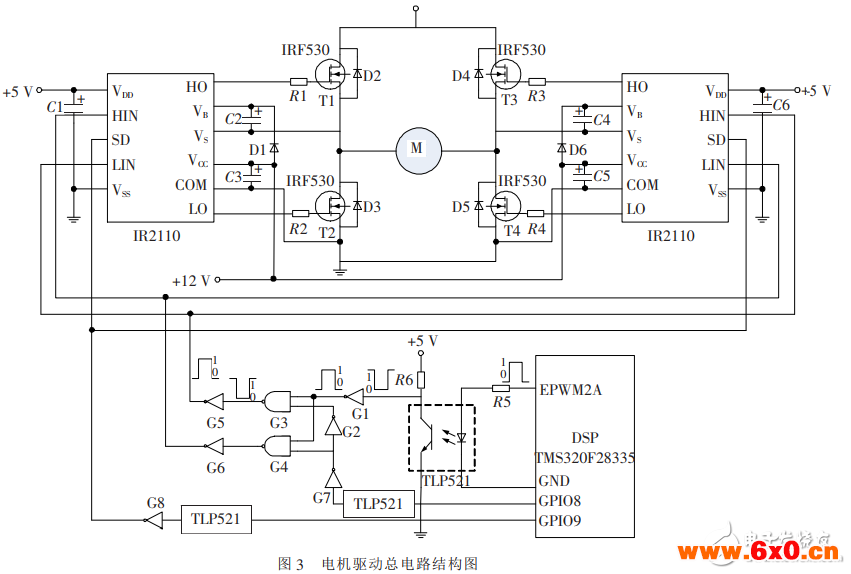
图3中,“非门”和“与非门”不仅是逻辑控制的需要,同时起到了对光耦输出波形信号进行整形的作用。
T1~T4由4片IRF530构成H桥驱动对电机M进行控制,IRF530的栅极驱动由两片IR2110完成,其中一片IR2110的HIN和另一片的LIN连在一起,用一个PWM控制信号驱动电机的上桥臂和下桥臂MOSFET。
两片IR2110的SD端连在一起,由DSP的GPIO9管脚通过光耦合反相器G8后进行控制,GPIO9低电平时正常工作。
DSP的GPIO8管脚为高电平时G4门输出有效,电机正转;否则G3门输出有效,电机反转。所以可由DSP的GPIO8方便地控制电机的正反转。
另外,由图3可以看出,DSP输出的正脉冲传输到IR2110的控制端时也是正脉冲,因此可以直接由PWM波占空比的大小控制直流电机转动的快慢。
3、电路的测试
根据以上设计,由DSP产生PWM波,经过逻辑电路输入到IR2110,从而控制IRF530的通断,调节PWM波的占空比即可控制电机的转速。
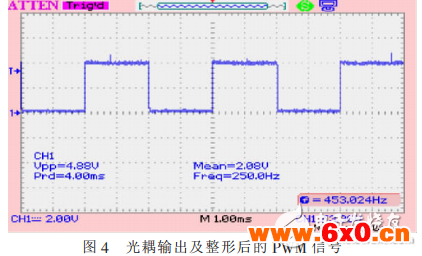
占空比即可控制电机的转速。电路中,C1、C6取值为10μF,C2~C5取值为1μF,D1~D6选1N4148二极管,R1~R4取值为1kΩ,R5取值为180Ω,R6取值为10kΩ,反相器选为74LS04,“与非门”选74LS00,逻辑电压取为+5V,栅极驱动电压取为+12V,电机电压取为+5V,3个电源均共地,但DSP电源是隔离的。当PWM波的频率为250Hz、占空比为50%时,对型号为RN260-CN38-18130的电机进行了测试。测试示波器型号为安泰信ADS1102C。
图4为经过“与非门”和反相器的信号,也是IR2110的控制信号。可以看出,信号经过门电路后不仅干扰被大量减少,而且波形更加规则平整。
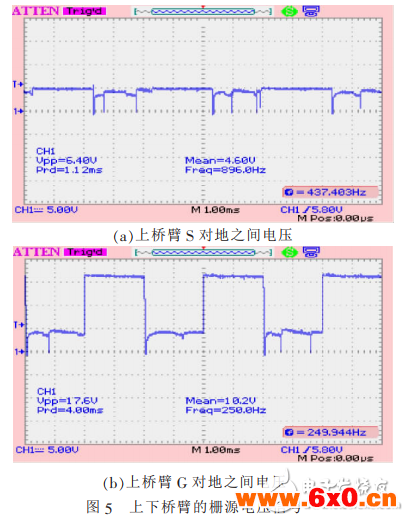
下桥臂的栅源电压容易控制,但上桥臂的栅源电压是由自举电路形成的,因为在上桥臂导通时源极电压基本等于驱动电机的电源电压,这时要上桥臂的MOSFET继续导通就必须使栅极电压随着源极电压一起升高,不管源极电压是多少,栅源电压要保持不变,这就使得栅极电压要随着源极电压进行浮动。
图5(a)为上桥臂的源极对地电压信号,图5(b)为上桥臂的栅极对地电压信号。可以看出,源极电压随着PWM波的变化而变化,其平均电压浮动值为4.6V;而栅极电压会随着源极电压的变化而相应浮动,其峰峰值为17.6V,则相对于源极电压基本是13V,最终使得栅源电压为稳定值。
整体测试结果表明,直流电机运转平稳,控制精确,达到了设计要求。
本文对直流电机进行了H桥驱动控制的全过程设计,采用功率MOSFET芯片IRF530作为开关元件,IR2110作为MOSFET的栅极驱动控制,用DSP产生PWM信号并通过光耦及逻辑控制送至IR2110。成功地使上桥臂驱动电压进行浮动控制,可以方便地进行启停和正反转控制,电机运行平稳良好,达到了设计目的。本文给出的驱动控制电路也适合其他类似的应用,具有较大的实用参考价值。








 QQ交流群
QQ交流群

