

0 引言
转动惯量(Moment of Inertia)是刚体绕轴转动时惯性(回转物体保持其匀速圆周运动或静止的特性)的量度,用字母I或J表示。转动惯量在旋转动力学中的角色相当于线性动力学中的质量,可形象地理解为一个物体对于旋转运动的惯性。转动惯量对伺服系统的精度、稳定性、动态响应都有不小影响,伺服系统应用中,折算到电机轴的负载惯量与电机的惯量之比不能过大,必须合理取值,否则,系统一般会出现振荡甚至失控。但为何需要合适的惯量比,而且这个推荐的惯量比,在实践中如何取值比较合理,这些都是工程师常感到困惑的问题。
1 、伺服电机负载惯量比的适宜性分析
1.1 惯量匹配- -最佳的功率传输和最大加速度
所有的机械系统都存在一定程度的弹性(也即刚性是无法无穷大的),而有部分机械系统则存在背隙。这两种的任何一种达到了一定程度时,都会导致系统响应性能极差。因此所谓的惯量不匹配可能导致的问题,其实是由于机械刚性不足,可能存在着较大的弹性或背隙而可能产生的运动不稳定问题。伺服系统中我们需要控制的运动量是负载端的位置或转速,但实际上却是以安装在电机上的反馈装置检测到的位置或转速信号来代替目标负载控制量,而由于刚性的有限性,这种控制方式在一定条件下,特别是惯量比太大时,较大概率会出现不稳定问题。
要提高系统的快速响应性,首先必须提高机械传动部件的谐振频率,即提高机械传动部件的刚性和减小机械传动部件的惯量。其次通过增大阻尼压低谐振峰值也能为提高快速响应性创造条件。在不少装备应用中,机械传动部件刚性不足和惯量过大是很普遍的。因此在满足部件强度和刚度的前提下,应尽可能减小运动部件的惯量。
对于一个特定的电动机,如果采用减速机构,使归算到电动机轴上的负载惯量与电动机的惯量相匹配(负载惯量等于电机惯量,即惯量比为1),在忽略减速器所增加的惯量和效率损失的情况下,系统就能实现最佳的功率传输,并能得到最大的负载加速度,这就是惯量匹配的涵义。文献[5]也有类似解读。
但是在国内习惯用“惯量匹配”的概念来代替“合适惯量比”的概念。国外的惯量比研究中,基本都不提“惯量匹配”的概念,而是提“惯量不匹配”(Inertia Mismatch)的概念。如文献[2]、[3]、[4],都是基于绝大部分伺服系统应用都是“惯量不匹配”的实际情况下,研究如何实现伺服系统快响应又不产生不稳定问题。
文献[1]从加速度最大的原则出发,推导了负载惯量、电机惯量、减速比三者的关系符合公式(1)时,可以实现负载惯量匹配。
对于负载已经确定,而且电动机也已选定的系统而言,如果减速机构的减速比按照公式(1)来选取时,则称为最佳减速比,这时归算到电动机轴上的负载惯量与电动机的惯量实现了所谓的惯量匹配(即惯量比为1)。
文献[5]从负载功率变化率最大的原则出发,也推导出负载惯量与电动机的惯量相等时,实现了惯量匹配。
但在实际应用中考虑到减速机构本身的惯量、减速机构的低效、减速机构输入轴及电机的最高速度限制、机械空间限制、成本等原因,绝大部分装备制造业中应用的伺服驱动系统,减速机的选择都不是按照最佳减速比来确定的,也即负载惯量与电机惯量一般是不匹配的。因此工程应用中要研究的不是实现负载惯量匹配,而是实现负载惯量与电机惯量的比率在合理的范围,确保系统的快速响应同时能稳定运行即可。
1.2 常用传动机构适宜惯量比推荐值范围
在应用中需仔细考虑电机所驱动机械机构的类型(因为不同传动机构有不同的刚性)并采用适宜的惯量比。表1列出了不同类型的减速机构所具有的
 比值的不同推荐值范围。(注:为加入减速机构之后,归算到电动机轴上的负载惯量。而JL则是不加入减速机构的负载惯量)
比值的不同推荐值范围。(注:为加入减速机构之后,归算到电动机轴上的负载惯量。而JL则是不加入减速机构的负载惯量)

表1常用传动机构适宜惯量比 推荐指范围
推荐指范围
对表1应用补充说明:
当需要频繁快速启停时,为了保证足够的加速度使系统响应快速和满足系统的稳定性要求,则惯量比的选取宜往下限靠,可以考虑惯量比不要超过表1中最大值的一半来选取。
1.3 负载惯量比太大的不利影响分析及实验结论
伺服驱动系统负载惯量比过大时,系统一般会出现振荡甚至失控。如果系统传动刚性为无穷大,理论上负载惯量比也可以设置到无穷大。连轴方式的扭转刚性,以及负载惯量比都会影响振荡的频率和幅度,不过连轴方式的扭转刚性的影响程度大得多。如果希望根除系统振荡现象,更多的时候应该从增大系统传动刚性的角度下功夫。提高电机与负载之间的连轴器的抗扭刚度,可以提升振荡频率,同时可降低振荡的幅度。文献[4]的研究测试结果表明,如果连轴方式的扭转刚性较低,即使在负载惯量匹配(负载惯量比为1)的条件下,速度响应也可能会出现振荡的不稳定情况。
为了研究负载惯量比过大对伺服驱动系统的影响,在文献[3]中,做了电机带不同惯量负载的两类测试。两类测试结果结论如下:
1) 两种测试中,在一定的惯量比情况下,系统都能够运行稳定而且速度响应都无超调或振荡。(注意在不是惯量匹配,而是惯量比为5的条件下,伺服系统响应仍能够很稳定)
2) 相对于初始调试好驱动器参数时的惯量值,随着负载惯量较大幅度增大或减少,负载响应变得很差。例如测试一中,惯量比增大到一定程度之后,速度严重超调,甚者振荡,振荡的频率较低,而且随着负载惯量的增大,整定时间越来越长。在测试二中,相对于初始调试好驱动器参数时的惯量值,随着负载惯量的减少,在减少到小于初始调试好驱动器参数时的惯量值的一半时,系统就变得不稳定了,而且振荡的频率较高。
1.4 解决负载惯量比太大的策略
为了消除由于负载惯量与电动机惯量之间的不匹配倍数太大引起的系统不稳定,可以采取以下几项措施:
1) 首先是提高机械系统的刚度。(例如,提高连轴器的抗扭刚度,可以提升响应的振荡频率,同时可降低振荡的幅度)
2) 其次采用合适的减速机构(如减速箱、同步带轮减速等),尽可能把负载惯量与电动机惯量之间的不匹配程度降到最小。(推荐适宜惯量比见表1)
3) 在上述措施无效的情况下,可以采取增加电动机惯量的方法,尽可能把负载惯量与电动机惯量之间的不匹配程度降到最小。增加电机转动惯量可以明显降低谐振点谐振幅值,提高伺服系统稳定性。但要注意电机的体积、成本一般是随着额定转矩增大而升高的,因此为了惯量比合理而选用更大电机惯量的电机时,最好选用转矩定额一样的,而仅惯量较大的电机。这样才能避免电机体积、成本大增。
4) 另一种解决方案是采用考虑了连轴扭曲量的高阶伺服驱动系统,该系统需要用到电机本体的位置反馈、同时还需要负载端的位置反馈,构成全闭环系统。这种系统可以有更快、更稳的瞬态响应。
2 、负载惯量计算及电机选型举例
雷赛公司的交流伺服电机一般有不同惯量的型号可供用户选用,如60、80机座电机都有中惯量和小惯量两种。下面通过两个常见案例负载惯量计算,合理电机选型,来说明减小惯量不匹配的方法。
2.1 丝杆结构
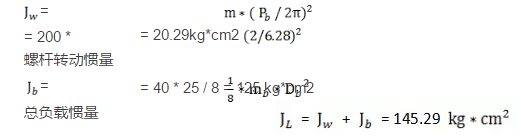
已知:负载重量m=200kg,螺杆螺距Pb=20mm螺杆直径Db=50mm,螺杆重量mb=40kg,摩擦系数µ=0.002,机械效率η=0.9,负载移动速度V=30m/min,全程移动时间t=1.4s,加减速时间t1=t3=0.2s,静止时间t4=0.3s。请选择满足负载需求的最小功率伺服电机。

解:1) 计算折算到电机轴上的负载惯量
重物折算到电机轴上的转动惯量
2)计算电机转速
电机所需转速 N = V / PB= 30 / 0.02= 1500 rpm
3) 计算电机驱动负载所需要的扭矩
克服摩擦力所需转矩
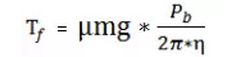
=( 200 * 9.8 * 0.002 * 0.02 )/ 2π / 0.9 = 0.01387 Nm
重物加速时所需转矩

= 200 * (30 / 60 / 0.2) * 0.02 / 2π / 0.9 = 1.769 Nm
螺杆加速时所需要转矩
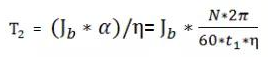
= 0.0125 * (1500 * 6.28 / 60 / 0.2) / 0.9 = 10.903 Nm
所需最大转矩

选定电机方案:运动系统总惯量为145.29kg*cm2,需要最大转矩为12.686Nm。雷赛ACM13030M2E-51-B电机,额定转速2500RPM,额定力矩12NM,转子惯量29kg*cm2,负载惯量比=145.29/29≈5倍,符合表1的负载惯量比推荐值范围。
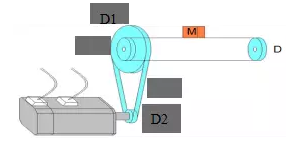
2.2 同步轮结构
已知:快速定位运动模型中,负载重量M=5kg,同步带轮直径D=60mm,D1=90mm,D2=30mm,负载与机台摩擦系数µ=0.003,负载最高运动速度2m/s,负载从静止加速到最高速度时间100ms,忽略各传送带轮重量,选择伺服电机。
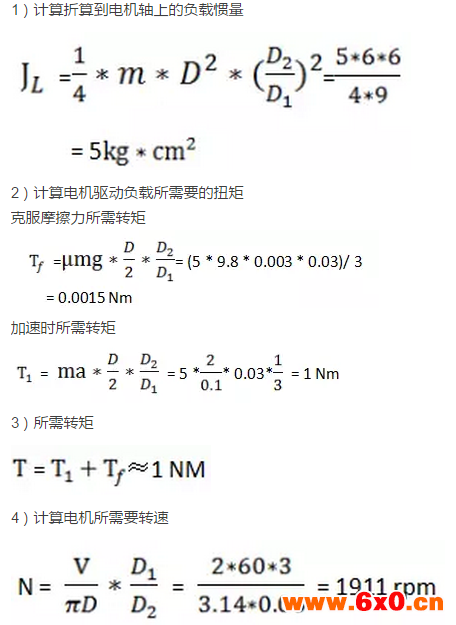
选定电机方案:
由上述计算结果,可选择雷赛伺服电机ACM6006L2H(额定转矩1.9NM,额定转速3000RPM,电机惯量0.6 kg.cm^2),惯量比为:5 / 0.6=8.3倍。
笔者在一些客户现场发现, 有部分用户选用了以下型号电机:ACM6004L2H(额定力矩1.27NM,峰值转矩3.81NM,额定转速3000RPM,电机惯量0.42 kg.cm^2)。如果选择了此方案,系统惯量比为5/0.42=11.9倍,动态响应性能及定位完成时间都会比选择ACM6006L2H伺服方案要差,合理的惯量比对整个运动系统的动态性能有很大的提升。
3、 结论
归算到电动机轴上的负载惯量与电动机的惯量比为1时,我们称之为惯量匹配。但在实际应用中绝大部分负载惯量是不匹配的。因此我们要研究的不是实现惯量匹配,而是实现负载惯量与电机惯量的比率在合理的范围。
要提高伺服系统的快速响应特性,首先必须提高机械传动部件的谐振频率,即提高机械传动部件的刚性和减小机械传动部件的惯量。其次通过增大阻尼压低谐振峰值也能提高快速响应特性创造条件。第三,如果负载惯量较大时,可以考虑采用减速机构,实现负载惯量与电机惯量之间的惯量比在合适范围(具体见表1)。在部分应用案例中,也可以考虑选用惯量更大的电机,来满足降低惯量比,提高加速性能和稳定性的要求。最后,伺服驱动控制算法很多新技术的成功应用,也为伺服系统更高精度、高平稳性运行提供了可能。
雷赛简介
雷赛智能是智能装备运动控制领域的世界知名品牌和行业领军企业。
自1997年成立以来,雷赛一直以“替代人类手工劳动”为企业使命、聚焦于伺服电机驱动系统、步进电机驱动系统、运动控制卡、运动控制器等系列精品的研发、生产、销售和服务,并通过锲而不舍、点点滴滴的持续努力来成就客户梦想和实现共同成长。
经过二十年如一日的产品创新、市场开拓和应用服务,雷赛已经成为全球产销规模领先的运动控制产品和解决方案提供商。由于雷赛产品兼具稳定可靠和性能优越的双重优势,在电子、机器人、机床、激光、医疗、纺织等行业获得上万家优秀设备厂家的长期使用,且远销美国、德国、印度等60多个国家。








 QQ交流群
QQ交流群

