

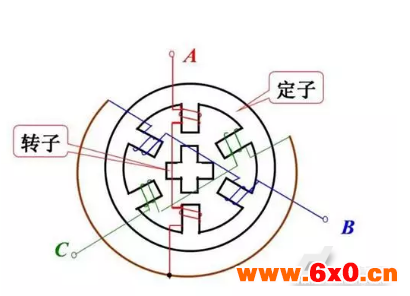
何为步进电机
当电流流过定子绕组时,定子绕组产生一矢量磁场。该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。每输入一个电脉冲,电动机转动一个角度前进一步。它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。改变绕组通电的顺序,电机就会反转。所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。
通常见到的各类电机,内部都是有铁芯和绕组线圈的。绕组有电阻,通电会产生损耗,损耗大小与电阻和电流的平方成正比,这就是我们常说的铜损,如果电流不是标准的直流或正弦波,还会产生谐波损耗;铁心有磁滞涡流效应,在交变磁场中也会产生损耗,其大小与材料,电流,频率,电压有关,这叫铁损。
铜损和铁损都会以发热的形式表现出来,从而影响电机的效率。步进电机一般追求定位精度和力矩输出,效率比较低,电流一般比较大,且谐波成分高,电流交变的频率也随转速而变化,因而步进电机普遍存在发热情况,且情况比一般交流电机严重。
三款步进电机电路图
电路图一:
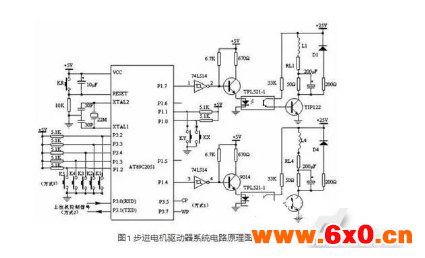
图1中的RL1~RL4为绕组内阻,50Ω电阻是一外接电阻,起限流作用,也是一个改善回路时间常数的元件。D1~D4为续流二极管,使电机绕组产生的反电动势通过续流二极管(D1~D4)而衰减掉,从而保护了功率管TIP122不受损坏。
在50Ω外接电阻上并联一个200μF电容,可以改善注入步进电机绕组的电流脉冲前沿,提高了步进电机的高频性能。与续流二极管串联的200Ω电阻可减小回路的放电时间常数,使绕组中电流脉冲的后沿变陡,电流下降时间变小,也起到提高高频工作性能的作用。
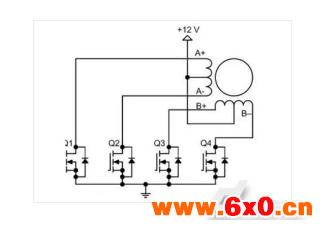
电路图二:
双极性步进电机的驱动电路如图所示,它会使用八颗晶体管来驱动两组相位。双极性驱动电路可以同时驱动四线式或六线式步进电机,虽然四线式电机只能使用双极性驱动电路,它却能大幅降低量产型应用的成本。双极性步进电机驱动电路的晶体管数目是单极性驱动电路的两倍,其中四颗下端晶体管通常是由微控制器直接驱动,上端晶体管则需要成本较高的上端驱动电路。双极性驱动电路的晶体管只需承受电机电压,所以它不像单极性驱动电路一样需要箝位电路。
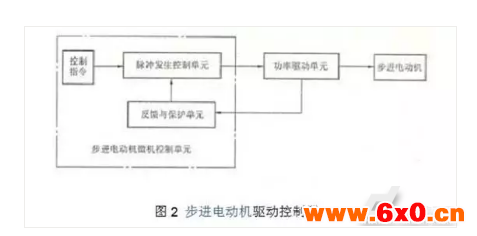
步进电动机不能直接接到工频交流或直流电源上工作,而必须使用专用的步进电动机驱动器,如图2所示,它由脉冲发生控制单元、功率驱动单元、保护单元等组成。图中点划线所包围的二个单元可以用微机控制来实现。驱动单元与步进电动机直接耦合,也可理解成步进电动机微机控制器的功率接口。
电路图三:
图8是使用L297(环形分配器专用芯片)和L298构成的具有恒流斩波功能的步进电动机驱动系统。
步进电机有没有编码器
步进电机没有编码器,如果你想在步进电机上加编码器可以步进电机双轴伸,在后面轴上面加编码器。
步进电机是执行原件,编码器属于反馈系统,编码器配合步进电机使用,用PLC控制其运行。按照原理来讲是PLC发送脉冲指令给步进驱动器,驱动器给步进电机提供相应电流使其运行,当编码器检测到步进电机运行到需要到达的位置的时候会反馈信号给PLC,PLC安装反馈的信号停止发送脉冲信号给步进驱动器,当步进电机没有了电动原提供电流当然也会立刻停止运行。(伺服电机就是此种装置),其实编码器会不停的反馈当前位置给PLC,PLC根据反馈值与目标值进行比较,调整转子转动的角度。
当然会不会停稳,停止后是不是自己想要的位置,这个要看电机有无制动装置?当然低速运行的话,一般进给精度都能满足。
还有一种就是提前计算好步进电机进给需要的脉冲数,然后用PLC编程,运行这么多脉冲数,步进电机停止,编码器反馈此时电机位置,形成半闭环控制。另外的高速定位,PLC程序里面就可以设置快到位置的时候电机进行减速进给,可满足定位精度。
进电机如何加编码器
步进电机加编码有点鸡肋,就是浪费资源;因为步进电机没法实时响应,必须有一个加速减速过程;
例:用带谐波减速器的东方步进马达,减速比100:1步距角:0.0072°,想加个编码器来防止丢步等等,以下是方法:
答:原则上也可以在丝杠的一头装电机,另一头装编码器。不过这样会受到减速机精度的影响,可能出现对丢步的误判。加编码器最好是双出轴的电机,电机后端加编码器,伺服电机都是这样做的,除非你是特殊使用或是条件限制(没有双出轴)。一般是加工2500线的就可以,线数太高也是浪费。
另外编码器的分辨率与你的步进电机的分辨率大致相同就好。如果驱动器上细分很高,而又只想检测是不是丢步了,编码器的分辨率只要与细分前的分辨率一致或略高就可以了。
进电机加编码器的意义
步进电机虽然是可以精确控制的器件,但是是开环的,需要加装编码器以实现闭环反馈控制;并可测得步进电机失步和旋转或移动速度,以用于动态速度控制。对于这种说法,小编觉得第一点开环控制需要编码器实现闭环反馈还算是可以理解,因为小编自己在使用中,偶尔也会因为步进电机的线连接不好,而导致步进电机并未能正常工作。对于第二点步进电机的速度控制就觉得不是很有必要,因为通过控制步进电机的脉冲频率就已经能够实现调速了,实在不觉得有必要再使用外部反馈。








 QQ交流群
QQ交流群

