

笔者旨在通过本文,阐述PMSM电机控制基本原理及获取电机位置offset值的方法,对PMSM电机控制入门者提供一定的帮助。
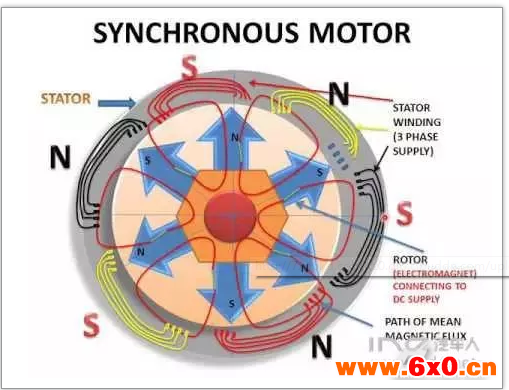
PMSM其英文全称为Permanent-magnetSynchronousMotor,直译为永磁同步电机。
它需要满足几个特点:
(1)三相定子之间通相序互差120度的交流电压产生旋转运动的定子磁场。
(2)转子采用永磁体励磁,不管其励磁材料是铝镍钴、铁氧体还是钕铁硼;不管其安装是内埋还是表贴,通过特殊的定子与转子形状设计,最终在气隙空间中呈现正弦排列的N-S磁场。
(3)基于以上两点,反电势必须是正弦波,这是PMSM与BLDC(反电势梯形波)的最大区别。
由于PMSM的转子已经固化,怎么样去控制电机这个问题就可以非常朴素的简化为:通过一种什么样的方式,能够让电机的转子轴产生一定的转动力矩?
(1)如果我是来自比较久远的年代不幸穿越来到现代,在我的那个年代里我掌握的知识这么一条:磁铁有N和S两个极性,同性相斥,异性相吸;
于我会想到我在拿另一个磁铁靠近转子,然后让手里的磁铁在定子周围画圈圈,那么我里的磁铁和转子之间就会产生作用力使得转子旋转起来;
(2)如果我来自稍近一点的年代,在那个年代伟大的奥斯特先生和安培先生已经发现电可以生磁的现象,正弦交变的电流能够产生在空间运动的圆形磁场(这不就是之前的我拿着磁铁画圈圈一样的效果么),那么我的工作就简单了,只要在转子周围布置定子线圈,在定子线圈上通过交变的电流就可以让转子受到磁场作用力而运动起来;
(3)如果我来自更近一些的年代,那个年代聪明的Park先生和Clark先生已经开始从事科研工作。他们发现一个问题,恒定转速标准的互差120°相位的三相交流电,其自由度只有两个,而如果站在三相电压所产生的运动的磁场的角度来观察这三相的电压,会发现其在磁场与磁场垂直方向所产生的投影是不随时间变化的,这就对控制的求解带来了很大的便利。
闲话说的稍微有点长,但是不管怎样,(2)和(3)都是要用到电机转角来产生交变的定子电压的。
标准的最简单的永磁同步电机控制算法框图如下:
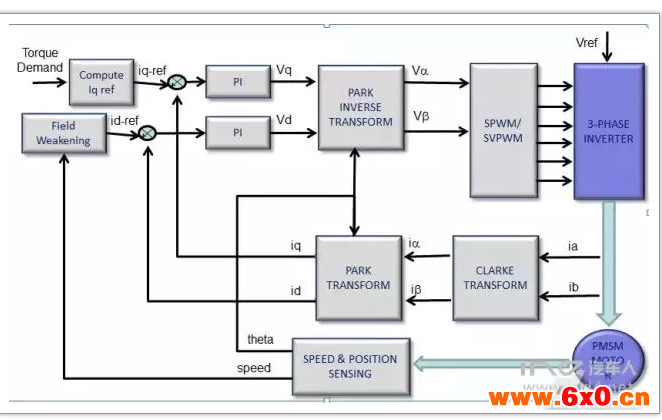
这个控制算法框图看起来很复杂,但说一千道一万,其目的可用以下几句话来描述:
(1)因为气隙中有运动的磁场,所以定子线圈在转子转动时会产生反电动势;
(2)最容易建立定子磁场的方法逆变器给定义一个与反电势同相位角的电压,克服反电势之后的定子电流所产生的定子磁场与转子磁场相互作用,对外做功。
说白了就是所谓的电机控制算法是无非就是制造出三个定子电压来,该算法要求让产生的那个正弦电压在相位上与定子切割磁力线所产生的反电势是同相的。
(为什么要说“最容易”这三个字,因为电机控制的微分方程实际上有无穷多个解,我们工程上所常用的只是其特解之一。太绕了,说人话就是其实在定子线圈上给定电压有无数种组合都能够实现让转子匀速状态下输出同样大小转矩的效果,在工程应用里使用的是最容易获取的一种方法而已。)
所以关于电机位置于是确定电机控制器的初始位置角就有这么几种方法:
(1)反电势法
a)电机相线不接ECU,电机位置信号连接到ECU,ECU中的软件只需要角度解算的软件,其他控制软件一概不需要;
b)用手转动电机轴,软件中观测到的电机角度信号应从0到360度变化;
c)用伺服电机或其他设备拖动被测电机匀速旋转,测量其反电势,反电势与软件处理后的电机转角应该有如下对应关系(0度对应A相反电势从正0穿越到负0,120度对应B相反电势从正0到负0,240度对应C相反电势从正0到负0)。
d)如反电势与电机转角对应关系不满足,则应通过下列手段使之符合该关系。:
i.调节软件中的电机位置角Offset
ii.更改电机ABC相的定义(调换接线顺序)
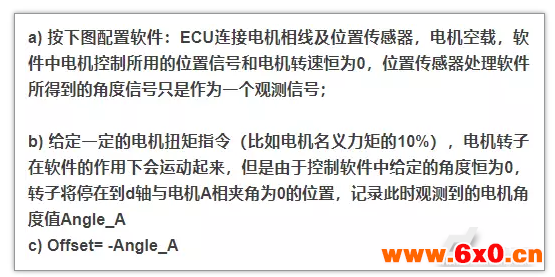
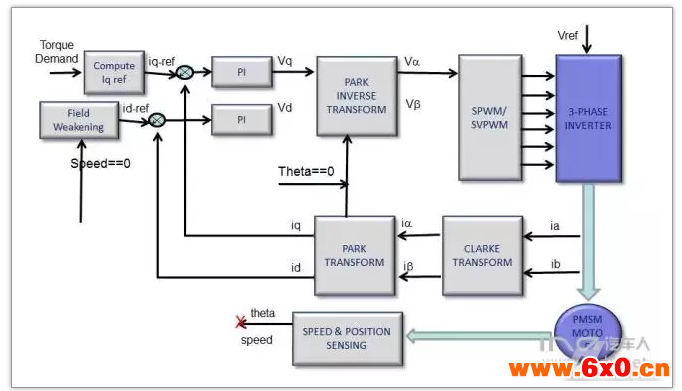
(2)转子拖动法
(3)转矩标定法








 QQ交流群
QQ交流群

