

Z源逆变器(ZSI)是一种DC-AC转换器,可以单级执行降压和升压功能。ZSI的一个独特优势是其直通状态,在这种状态下,同桥臂的两个开关可以在同一瞬间即时导通。不需要死区时间,输出失真也大大降低,不使用LC滤波器就能提供更高的输出。ZSI克服了传统系统的概念和理论限制,可以在不使用DC/DC升压转换器或升压变压器的情况下提升DC输入电压。本文针对无传感器控制的BLDC电机,提出了一种采用巧妙的随机脉宽调制(RPWM)技术的ZSI驱动器,旨在提高BLDC电机驱动系统的性能。
ZSI克服了传统系统的概念和理论障碍及限制,在没有DC-DC升压转换器或升压变压器的帮助下也可以提升DC输入电压。
永磁无刷直流(BLDC)电机由于其更高的效率、更大的功率重量比和更低的维护成本而被用于多种应用场合。梯形电动势(EMF)BLDC电机需要转子位置信息以便为变频器驱动排序。这种位置信息通常是由放置在电机非驱动端的三个霍尔效应传感器产生的。但是,这些对温度敏感的传感器不但会增加电机成本,而且需要特殊的机械设置来安装固定。
本文旨在探讨如何提高BLDC电机驱动系统的性能,为此提出了一种ZSI驱动方案,即采用巧妙的随机脉宽调制(RPWM)技术来驱动无传感器控制的BLDC电机。所提出的系统使用反电动势(BEMF)感测进行位置估算,并且ZSI驱动可以提供更宽范围的升压电压。针对ZSI-BLDC电机驱动,本文提出了一种迂回的双随机性简单升压脉宽调制(DTRSBPWM)技术,该方法能够以四种初始载波实现两种方式的随机性。
其中两个载波是正常和反向的固定频率三角波,第三和第四载波是通过混沌频率发生器及其逆变器获得的变频三角波。DTRSBPWM谐波功率分配方法要胜过简单升压PWM(SBPWM)方法。驱动系统的仿真研究是在MATLAB软件上完成的,并且已经使用SPARTAN-6场可编程门阵列(FPGA)(XC6SLX45)器件进行了验证。本文将重点讨论输出线电压的总谐波失真(THD)、直流母线利用率,以及谐波扩展因子(HSF)。
ZSI工作原理
Z源逆变器是一种DC-AC转换器,可以作为单级执行降压和升压功能。ZSI克服了传统系统的概念和理论障碍及限制,在没有DC-DC升压转换器或升压变压器的帮助下也可以提升DC输入电压。ZSI的工作原理可以分为四种模式。第一种模式是传统的主动状态(activestate)模式,即逆变器桥充当直流链路的电流源。第二种模式是直通状态模式,即逆变器桥在两个传统的零矢量之一中工作,直通逆变器的上下三个器件。第三种模式是非直通模式,即电感电流协助降低线电流的谐波。第四种模式是传统的零状态,即逆变器桥在其中的一种零状态下工作。
简单升压PWM
ZSI最常用的开关方法是简单升压PWM。这是一种简单的办法,只需两条直线来控制直通状态。当三角波形高于上包络线VP,或低于下包络线VN时,电路工作在直通状态。其它情况下,它就像传统的载波PWM一样工作。在简单升压PWM期间,整个器件产生的电压应力很高。
ZSI馈电式BLDC电机的无传感器控制
ZSI的无传感器控制如图1所示,通过估算反电动势的过零瞬间(来自端子电压)和正确的换向瞬间,并馈送到ZSI电路,对BLDC电机进行无传感器控制。电机的速度控制是通过一个比例积分控制器(PIC)来感应的,并与控制动作的参考速度进行比较。
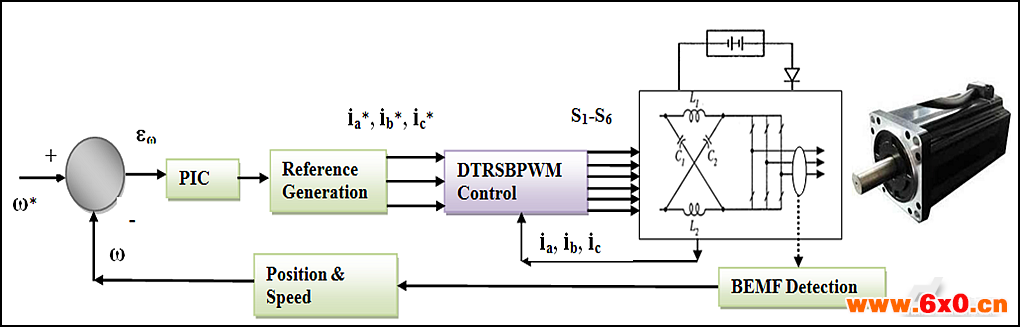
图1:ZSI馈电式BLDC电机的无传感器控制。
建议的RPWM方法
所提议的DTRSBPWM方法涉及两个级别的随机性,利用四个(两组)三角载波来实现。三角载波是在混沌数字生成器的帮助下生成的。基于混沌的PWM的基本原理是使用混沌信号来改变开关频率或载波频率。被限制在一个预定范围内的混沌数被馈送到三角波发生器,该数目固定为当前载波周期的频率并生成载波。载波的数量和频率每个周期都改变。我们来深入探究一下由公式(1)描述的混沌序列。
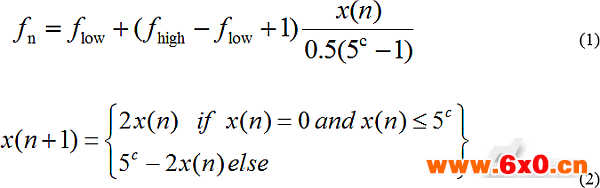
其中,fn是混沌PWM的第n个开关频率,混沌序列xn可以简单地通过迭代生成。因此,开关频率可以从下限flow变化到上限fhigh。任意的周期性轨迹可以通过使用c的不同值得到。通过混沌序列获得的典型三角载波如图2所示。这种载波形式及其180º相移(反相器形式)被认为是第一组载波。
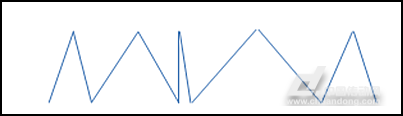
图2:通过混沌序列的三角载波。
第二组载波是普通的三角波及其反相形式。双随机载波由伪随机二进制序列(PRBS)表示。对于4×1多路复用器(MUX),如图3所示,所有四个载波都作为输入提供,周期选择则由线性反馈移位寄存器(LFSR)中的两个选择位完成。多路复用器(MUX)的输出是所需的随机载波,与传统的正弦PWM(SPWM)情况下的正弦参考值进行比较,以获得脉冲。
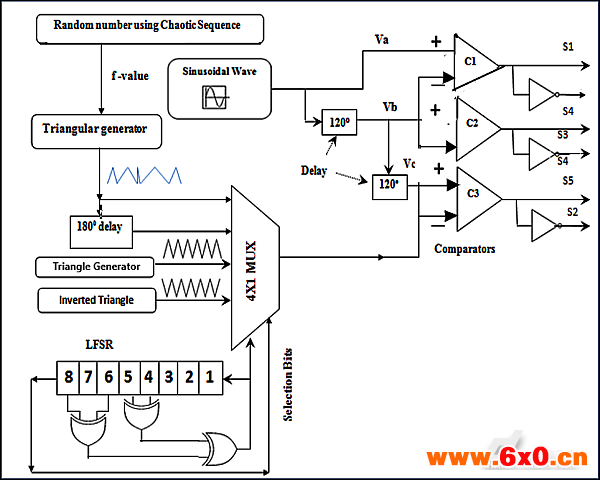
图3:DTRSBPWM发生器的逻辑示意图。
仿真和实验调查
仿真是在MATLAB-Simulink(版本2010a)软件中用常微分方程(ODE)求解器ode23tb进行的。表1和表2分别列出了ZSI和BLDC电机的规格。混沌频率限定在2kHz和4kHz之间。另外两个载波分别是+3kHz和-3kHz。图10显示了无传感器BLDC驱动系统的Simulink原理图。
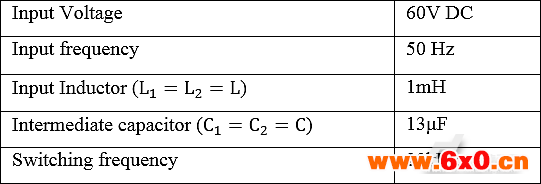
表I:ZSI的规格。
表2:无刷DC电机的规格。
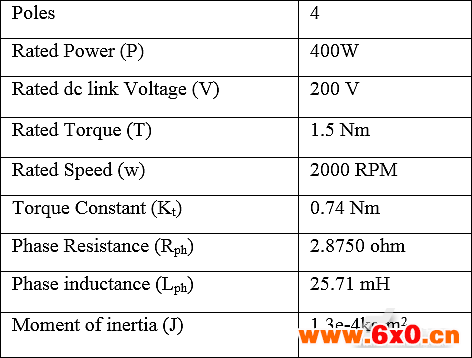
图4显示了阻抗网络电容和电感两端的电压。
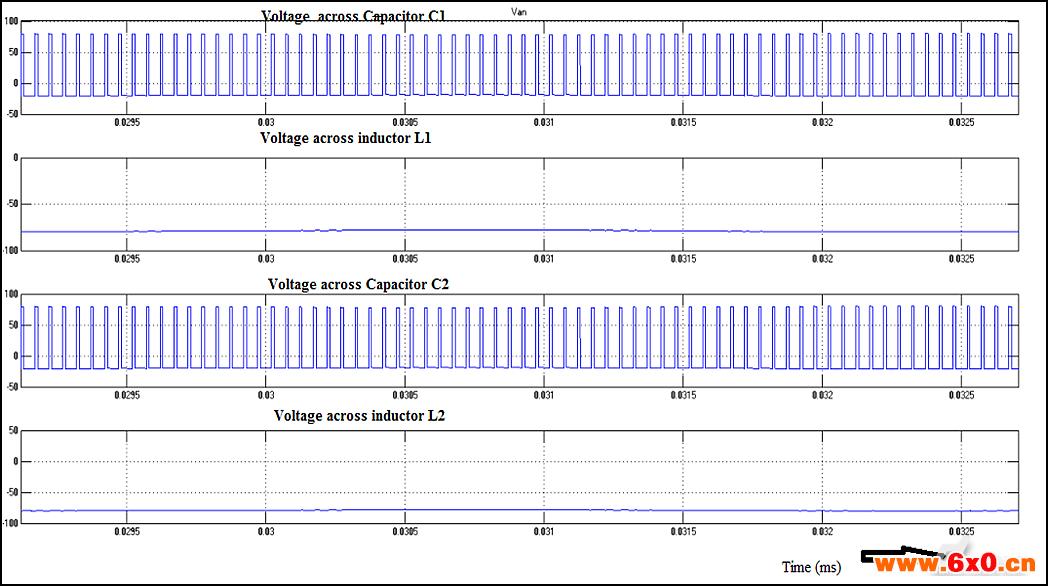
图4:电感和电容两端的电压。
图5显示了ZSI的输出电压。
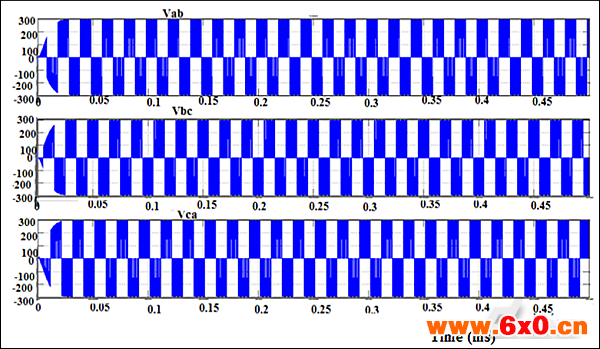
图5:ZSI的输出波形。
预估的BEMF波形如图6所示,A相电流和A相BEMF如图7所示。
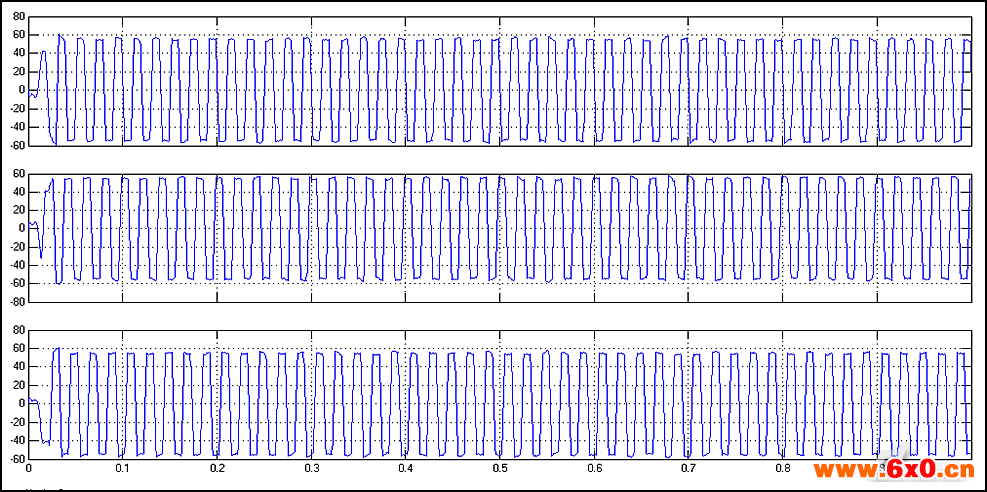
图6:预估的BEMF波形。
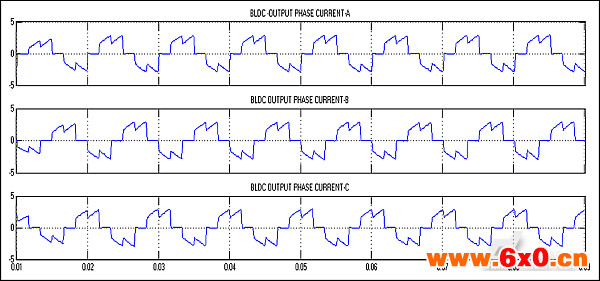
图7:定子波形。
图8和图9显示了开发系统对电源电压和负载转矩阶跃变化的抗干扰性能。
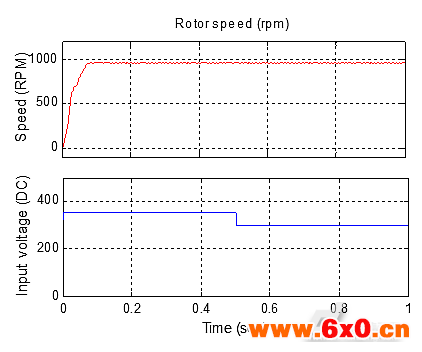
图8:电源电压从-350Vdc变化至300Vdc时的速度响应。
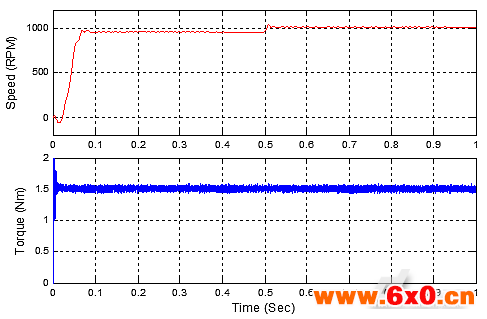
图9:速度响应随负载转矩变化而变化。
在负载转矩TL=1.5Nm的情况下,转速从950变为1000rpm的速度响应如图10所示。
图10:转速从950到1000rpm(TL=1.5Nm)时的速度响应。

表3:谐波传播能力。
所提议的驱动系统可以使用SPARTAN-6现场可编程门阵列(XC6SLX45)器件实现。该架构使用VHDL语言进行设计,其功能仿真使用Modelsim6.3工具进行。使用综合工具XilinxISE13.2可以完成寄存器传输级(RTL)验证和实现。
本文提出的基于ZSI的BLDC电机驱动和无传感器速度控制具有很多优点,不但能够提升直流电源的电压并提高系统的安全性,而且适用于恶劣环境,因为它不需要传感器和导线。其它优点还包括低成本、小尺寸和少维护等。基于四个三角载波的新型随机脉宽调制方案改进了系统的谐波功率扩展特性。在DTRSBPWM的情况下,HSF的值降低,从而可降低噪声和机械振动。








 QQ交流群
QQ交流群

