

电动牙科座椅采用稀土永磁无刷直流电机驱动系统,此系统将近年来发展迅速的无刷直流电机与DSP控制技术相结合,采用一片DSP控制器实现对两台稀土永磁无刷直流电机的控制,具有低成本、高性能的特点。
稀土永磁无刷电机由于具有效率高、性能好、结构简单、散热容易、噪声小等特点,满足医用行业对医疗器械各方面的特殊要求。因此,以稀土永磁无刷电机驱动的直线式驱动机构代替有刷电机驱动机构和单相交流异步电机驱动机构,具有良好的社会意义及广阔的市场前景。
系统原理及其组成
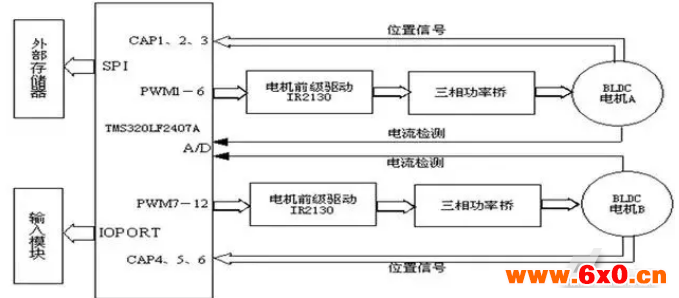
图1系统原理图
电动牙科座椅具有两个自由度,俯仰和升降。本伺服系统采用两台稀土永磁无刷直流电动机作为运动控制主部件,针对两个自由度分别给以驱动。如图1所示,电机A为俯仰电机,电机B为升降电机。
电机控制部分仅采用一片DSP(数字信号处理器)芯片TMS320LF2407A实现对两台无刷电机的控制,充分利用了DSP丰富的片上资源,对两台电机的PWM输入全部采用DSP提供,省去了逻辑芯片,提高了系统的可靠性。通过SPI片内串行外设扩展了存储器芯片,采用FRAM(非易失性存储器)具有掉电保护功能,实现在关电的情况下对电动座椅的位置的记忆。
电机
电机额定功率为55W,额定电压24V,工作状态为短时运行,额定转速1800rpm,设计模式按方波设计,电机为十二槽两对极。槽形为梯形口扇形槽,绕组形式为三相星形六状态,槽满率为52%,转子磁钢采用粘结钕铁硼,径向充磁。磁钢具体参数如下:Br>6000Gs,Hc>5000Oe,[BH]max>8MG·Oe,Hjc>10000Oe。
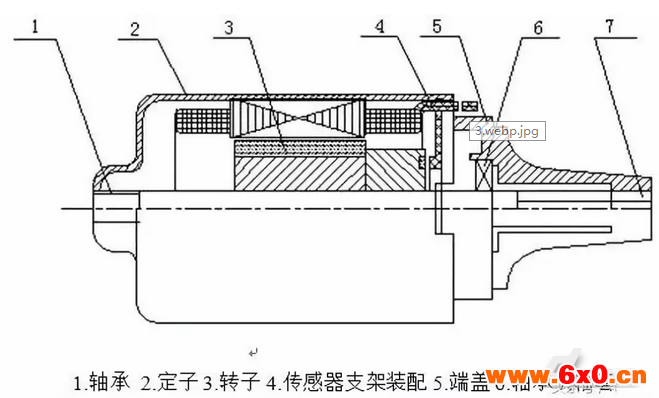
电机总装图如图2所示:
图2电机总装图
有限元分析中,电机实际电磁转矩为0.2394N·m。电机磁通、磁感应强度等参数的分布情况如图3、图4所示。从图4可以看出,电机气隙磁感应强度分布基本呈方波分布,求平均值基本与电磁方案设计结果相符。

图3电机磁通分布

图4电机气隙磁感应强度
控制器
本控制器主控单元采用TI公司的DSP芯片TMS320LF2407A,主控单元需要检测电机的电流信号和转子位置信号,并为驱动板提供六路PWM驱动信号,因此,控制一个无刷直流电动机,需要6个PWM输出,一路ADC转换,三个捕获单元。
对于TMS320LF2407A处理器,由于其有两个事件管理器(EVA和EVB),每个事件管理器都有3个捕获单元并可以输出6路PWM,所以该芯片可以同时直接为两台无刷直流电动机提供控制信号。如图1所示。由于控制芯片外围电路较为成熟,但其具有较大的程序存储器,因此,相对于硬件而言,要实现针对电机的灵活控制,着重从软件方面入手。
驱动
本电机控制系统的驱动环节电路采用全桥结构,通过对六个功率元件的开、关的控制,对电机电压、电流波形进行调制。通过利用TMS320LF2407A内含的四个各自独立的16位通用定时器、六个全比较器实现电机电压的PWM调制。TMS320LF2407A内含可编程死区控制,六个全比较器中的任何一个与通用定时器、死区控制单元一起用于产生一对有可编程死区和输出极性的PWM输出。共有十二路这样的PWM输出。每六个输出可以用来控制无刷直流电机,实现DSP对两台电机的控制。
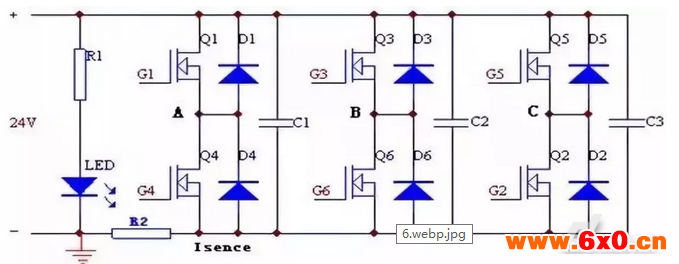
图5功率主电路
控制系统功率主电路如图5。选用IRF540功率管,该器件最高工作电压为100V,最大工作电流28A,最大功率损耗150W,完全满足该系统功率要求;续流二极管D1~D6选用快恢二极管;电容C1~C3用来吸收直流母线上的尖峰电压,防止过高的母线电压击穿功率管;电阻R2用来检测电机的直流母线上电流,防止电机过流发生故障,该过流信号Isence经过处理后输入到功率桥的前级驱动芯片和DSP处理器中,在过流时可以及时封锁门极驱动信号。
功率管的前级驱动采用IR公司的电机驱动芯片IR2130,该芯片集驱动、死区、过流保护等功能与一体,使用单电源即可完成六只功率管的驱动,使用时极为方便,特别适合于小功率驱动领域。
软件
根据定义的功能,软件分为如下几大模块:
初始化模块:主程序初始化模块(_c_int0),EVA初始化模块(EVA_INIT),EVB初始化模块(EVB_INIT);
电机启动模块:电机A启动模块(MOTORA_START),电机B启动模块(MOTORB_START);
换向模块:电机A换向模块(COMMUTATION_A),电机B换向模块(COMMUTATION_B);
霍尔信号捕获模块:电机A的霍尔信号捕获模块(CAPIN_A),电机B的霍尔信号捕获模块(CAPIN_B);
键盘分析模块:电机A的键盘输入分析模块(KEY_ANALYSE_A),电机B的键盘输入分析模块(KEY_ANALYSE_B);
PID调节模块(_PID),位置记忆模块(REM)。
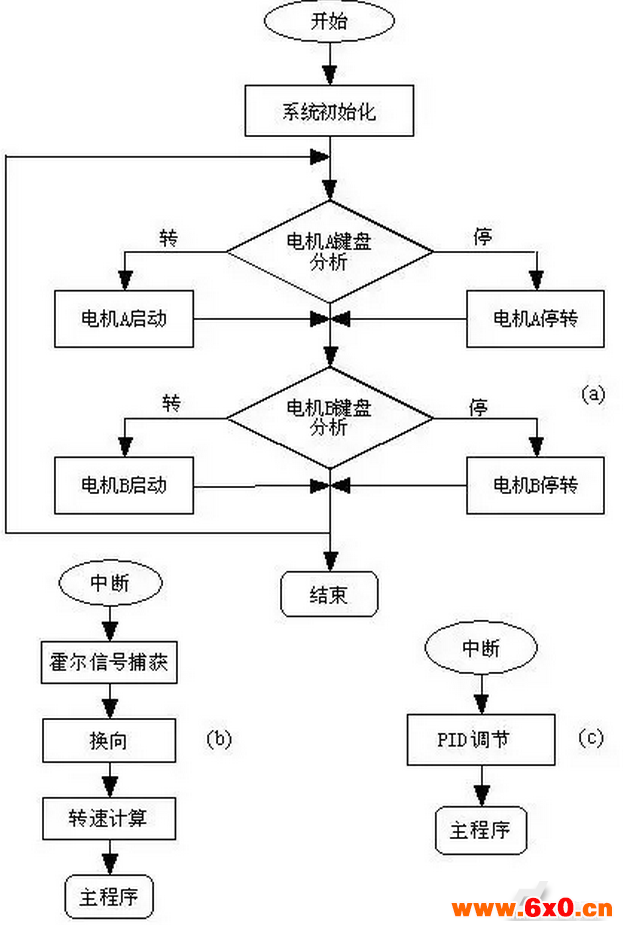
图6软件主流程图
软件主体采用工程上流行的模块化顺序结构,霍尔信号捕获和PID调节采用中断控制方式。图6为系统软件流程图。其中图6(a)为系统主程序流程图,主要实现系统初始化以及两个电机运行状态的读取和设置,系统初始化完成对DSP系统寄存器、I/O端口、以及系统中断的设置,两个电机的运行状态的获得由键盘分析模块获得,根据得到的状态,决定电机是处于运行、启动或是停转状态。电机运行状态由全局变量RUN_STATE_A和RUN_STATE_B表示,088H表示电机处于运行状态,00H表示电机启动,0FFH表示电机停转。
软件中电机换向和PID速度调节都采用中断控制的方式。图6(b)是电机逆变器换向流程图,该中断子程序各模块完成霍尔位置信号的捕获、逆变器换向、速度计算三个主要功能,使电机正常运行,并为PID速度调节提供了速度反馈值。图6(c)为电机PID调节中断流程图,PID中断调节的中断信号由内部软件产生。
稀土永磁无刷直流电机与DSP控制技术相结合,是无刷电机的一个重要发展方向。








 QQ交流群
QQ交流群

