

4.2三相异步电机的电气制动
a.介绍
在很多系统中,电机仅靠自然减速来停止运转。停止的时间只取决于电机所驱动的机器的惯性和抵抗转矩。不过,在很多情况下都需要缩短这个时间,而电气制动是一种简单有效的解决方案。与机械和液压制动系统相比,它的优点在于比较稳定,不需要使用任何耐磨件。
b.逆电流制动原理
电机在运行的时候就与电源隔离开,然后通过另外一条通道重新连接到电源。这是一种非常高效的制动系统,其转矩通常高于起动转矩,所以必须尽早制动,以防止电机沿相反方向起动。
在速度接近零的时候,通过若干个自动设备来控制停止过程:
●摩擦停止检测器,离心停止检测器。
●精密计时设备。
●频率测量或转子电压继电器(滑环电机)等。
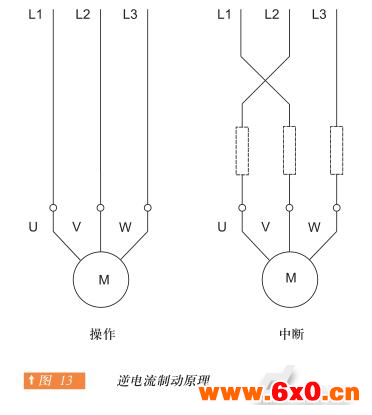
1.鼠笼电机
在选择这个系统之前(C图13),必须确保电机在完成相应功能的同时能够承受逆电流制动。除了机械压力,这个过程中转子还会受到较高的热应力,因为在每次制动操作中释放的能量(电源的滑差能量和动能)都会被耗散在笼内。
在制动过程中的热应力比加速过程中产生的热应力高三倍以上。在制动的时候,电流和转矩峰值明显高于起动时的数值。
为了确保平稳制动,在切换到逆电流的时候,经常把每个定子相位串联一个电阻器。这样一来,就可以像定子起动时那样降低转矩和电流。在鼠笼电机中进行逆电流制动有很明显的缺点,所以这个系统只用于一些低功率驱动的电机。
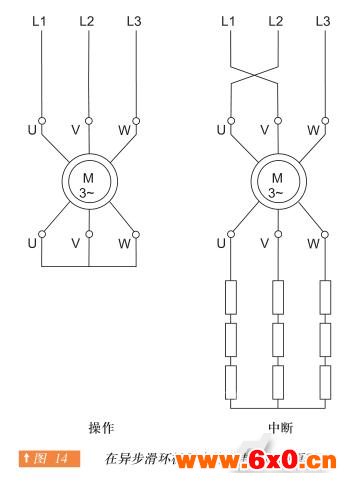
2.滑环电机
为了限制电流和转矩峰值,在将定子转换到逆电流之前,必须重新插入用于起动的转子电阻器,通常还需要增加一个额外的制动单元(C图14)。如果使用合适的转子电阻器,很容易将制动转矩调整到设定值。
在开启电流以后,实际的转子电压是停顿时的两倍,在某些情况下需要采取相应的绝缘措施。与鼠笼电机一样,大量能量会被释放到转子回路中。它完全耗散(除了少量损耗)在电阻器中。
可以借助上述设备中的一种或者转子回路中的电压或频率继电器让电机自动停止运转。这个系统可以让驱动负载保持在中等速度。它的特性非常不稳定(只要转矩发生微小变化,速度就会发生很大变化)。
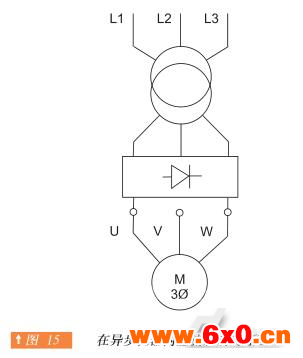
c.通过注入直流电流制动系统
这个制动系统用于滑环和鼠笼电机(C图15)。与逆电流系统相比,整流源的电阻器更少,因而价格更合理。如果使用电子速度控制器和起动器,这种制动方案不会增加成本。
在该制动过程中,需要把定子与电源隔离开,并向其发送整流电流。整流电流会在电机的气隙中产生一个固定磁通量。为了产生合适的通量,确保正确的制动效果,电流必须比额定电流大1.3倍。轻微的过电流会导致多余热损耗,在制动以后通过暂停来补偿这种热损耗。
因为电流值完全是由定子绕组电阻设定的,所以在整流源的电压较低。整流源通常是由整流器或者速度控制器提供的。它们必须能够承受刚刚从交流电源(比如380V有效值)上断开的绕组所产生的瞬态电压浪涌。转子的运动与固定磁场之间存在滑差(磁场沿着与逆电流系统相反的方向旋转)。电机的行为与在转子内放电的同步发电机类似。与逆电流系统相比,整流注入系统的特性差别很大:
●在转子电阻器或者笼内耗散的能量更少。只相当于运动物质释放的机械能。从电源获取的动能仅用于起动定子。
●如果负载不是驱动负载,那么电机不会沿着相反的方向起动。
●如果负载是驱动负载,系统会经常制动,并使负载保持低速。这是减速制动而非停顿制动。其特性比逆电流要稳定得多。
在使用滑环电机的情况下,速度-转矩特性取决于所选的电阻器。在使用鼠笼电机的情况下,系统很容易通过操作直流起动电流来调整制动转矩。不过,如果电机在高速下运转,制动转矩会比较低。为了防止严重的过热,在制动结束的时候必须使用相关设备切断定子中的电流。








 QQ交流群
QQ交流群

