

4.2三相异步电机的电气制动
d.电子制动
只需使用一个带制动电阻器的速度控制器即可实现电子制动。在这种情况下,异步电机用作发电机,机械能耗散到制动电阻器中,不会增加电机中的损耗。
关于更多信息,请参见电机起动器设备一章中关于电子速度控制设备的内容。
e.通过超同步操作实现制动
在这种系统中,电机的负载在高于同步速度的情况下进行驱动,使其行为类似于异步发电机,并产生一个制动转矩。除了少量耗散以外,能量完全由电源进行恢复。
在使用提升电机的情况下,这种操作相当于在额定速度下负载下降。制动转矩可以精确补偿负载的转矩,在恒定速度(而不是减速)下运行电机。
在滑环电机上,必须把所有或者一部分电机电阻器短路,以防止驱动电机的时候超过额定速度太多而导致机械性损伤。这个系统可以很好地限制驱动负载:
●速度稳定,与驱动转矩无关,
●可以将能量恢复成电源能量。
不过,它只有一个速度,与额定速度近似。超同步制动系统也用于多速电机,把速度从快调到慢。借助一个电子速度控制器很容易实现超同步制动,在降低频率设置的时候可以自动触发系统。
f.其它制动系统
在某些场合仍然使用单相制动系统。这个系统驱动两个电源相位之间的电机,并把未使用的端子连接到另外两个与电源相连的端子之一。
制动转矩被限制为最大电机转矩的1/3。这个系统无法制动整个负载,必须借助逆电流制动系统来完成全部功能。这个系统会产生严重的不平衡,损耗也较大。
另外一种系统是通过涡电流减速进行制动。除了机械制动(电动减速器)以外,这种系统的工作原理类似于工业车辆中所用的系统。机械能量耗散在减速器中。制动功能仅由一个励磁绕组控制。不过,该系统的一个缺点是会显著增加惯性。
●反转
为了将三相异步电机(C图16)反转,只要交叉两个绕组,以反转电机中的旋转磁场即可。
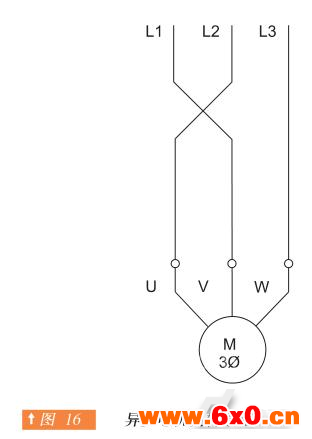
电机通常是在停止状态下反转,否则,反转相位会导致逆电流制动(参见讲述滑环电机的章节)。另外也可以使用上文提及的其它制动系统。如果能够操作所有绕组,那么也可以采用单相电机反转。
g.负载类型
对于电机来说,单位时间内的起动和制动次数对内部温度有很大影响。IEC标准:旋转电气机械–第1部分:额定规格和性能(IEC60034-1:2004)中给出了负载系数,帮助用户根据具体的操作计算发热,并准确确定电机的尺寸。
下面概述了这些负载系数。更多的相关信息请参见相应的IEC标准和厂商产品目录。
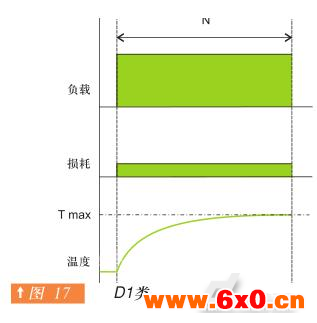
●连续工作模式-D1类(C图17)
恒定负载操作,保持足够长的时间,可以达到热平衡。
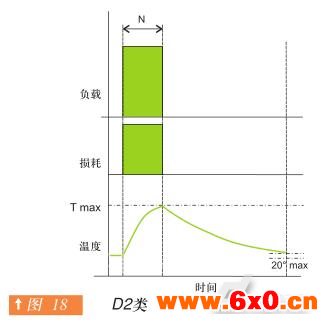
●临时工作模式-D2类(C图18)
在一段给定的时间内为恒定负载操作,该时间小于达到热平衡所需的时间,然后暂停操作,以便保持机器和周围冷却剂之间的热平衡(在20°C左右)。
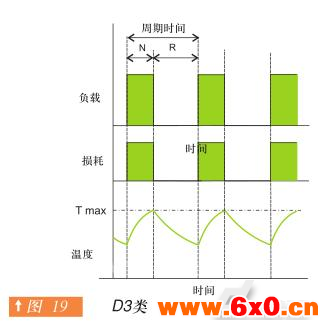
●非连续周期工作模式-D3类(C图19)
经历一系列相同的周期,每个周期都有操作时间和暂停时间。这种工作模式下的起动电流对发热没有明显影响。
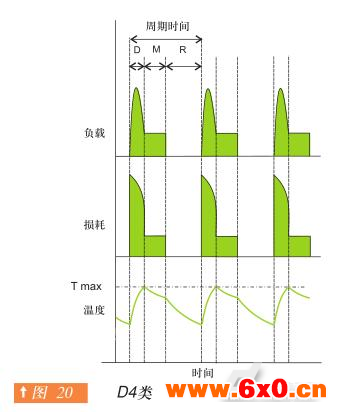
●带起动的周期断续工作模式-D4类(C图20)
经历一系列相同的周期,每个周期都有一段较长的起动时间、一段恒定负载操作时间和暂停时间。
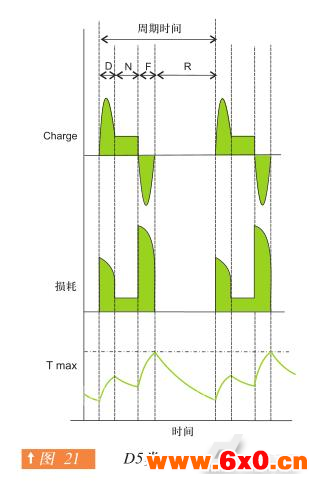
●带电气制动的周期断续工作模式-D5类(C图21)
经历一系列负载周期,每个周期都有一段起动时间、一段恒定负载操作时间、一段电气制动时间和一段暂停时间。








 QQ交流群
QQ交流群

