

某设备上有两套步进驱动系统,步进驱动器的型号为SH-2H042Ma,步进电动机的型号为17HS111,是两相四线直流24V步进电动机,要求:按下按钮SB1时,步进动机带动X方向和Y方向的机构复位,当X方向靠近接近开关SQ1时停止,Y方向靠近接近开关SQ2时停止,复位完成。
(1)主要软硬件配置。
1、1套STEP7-Micro/WINV4.0。
2、2台型号为17HS111的步进电动机。
3、2台型号为SH-2H042Ma的步进驱动器。
4、1台CPU226CN。
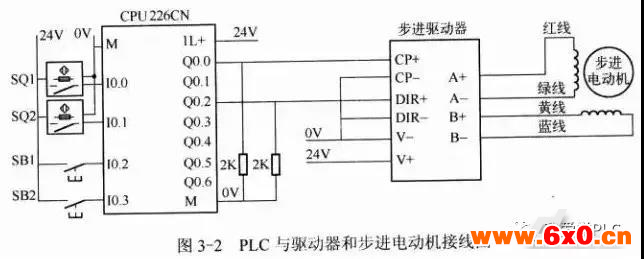
(2)步进电动机与步进驱动器的接线。
本系统选用的步进电动机是两相四线的步进电动机,其型号是17HS111,这种型号的步进电动机的出线接线图如图3-2所示(图中只画出1台电动机)。其含义是:步进电动机的4根引出线分别是红色、绿色、黄色和蓝色:其中红色引出线应该与步进驱动器的A+接线端了相连,绿色引出线应该与步进驱动器的A-接线端子相连,黄色引出线应该与步进驱动器的b+接线端子相连,蓝色引出线应该与步进驱动器的B-接线端子相连。
(3)PLC与步进电动机、步进驱动器的接线。
步进驱动器有共阴和共阳两种接法,这与控制信号有关系,西门子PLC输出信号是+24V信号(即PNP接法),所以应该采用共阴接法,所谓共阴接法就是步进驱动器的D1R-和CP-与电源的负极短接,如图3-2所示。顺便指出,三菱的PLC输出的是低电位信号(即NPN接法),因此应该采用共阳接法。
2、程序编写
1、主程序
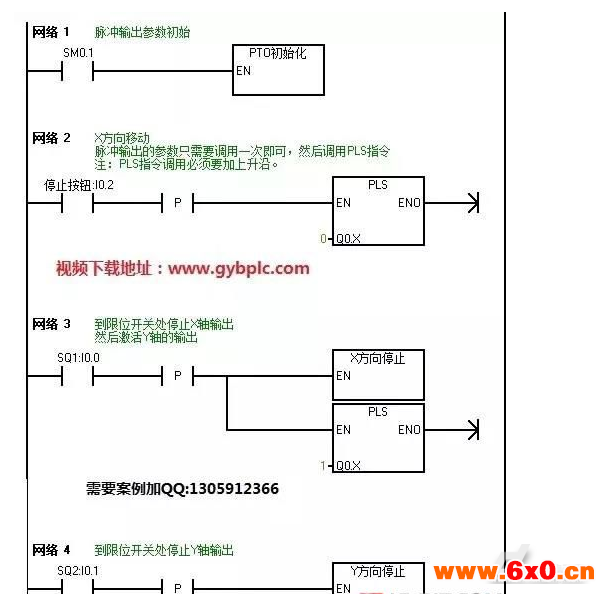
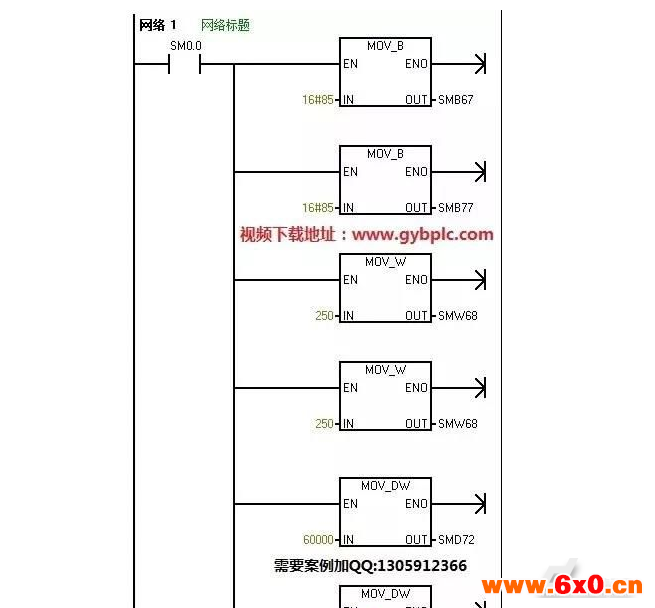
2、PTO初始化
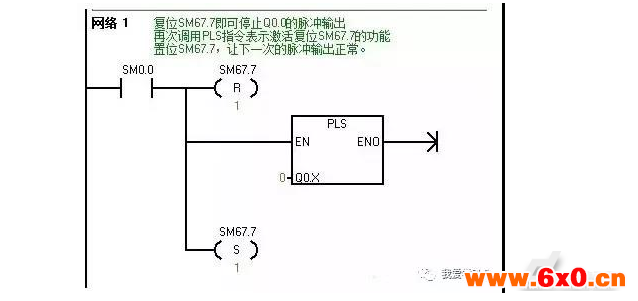
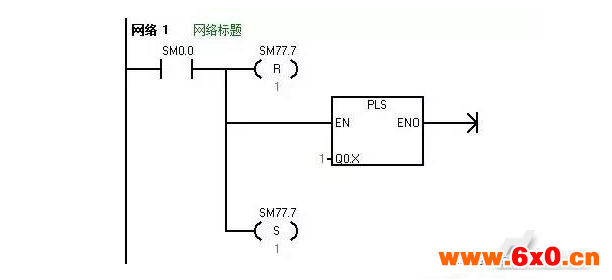
3、X方向停止
4、Y方向停止
【关键点】
编写这段程序的关键点在于初始化和强制使步进电动机停机而对SMB67的设定,其核心都在对SMB67寄存器的理解上。其中,SMB67=16#85的含义是PTO允许、选择PTO模式、单段操作、时间基准为微秒、PTO脉冲更新和PTO周期更新。
要停止PTO输出,必须先在控制字节中禁止PTO输出,且执行PLS指令。
若不想在输出端接分压电阻,那么在PLC的1L+接线端子上接DC+5V也是可行的。
声明:本文为转载类文章,如涉及版权问题,请及时联系我们删除(QQ:2737591964),不便之处,敬请谅解!
4、Y方向停止

【关键点】
编写这段程序的关键点在于初始化和强制使步进电动机停机而对SMB67的设定,其核心都在对SMB67寄存器的理解上。其中,SMB67=16#85的含义是PTO允许、选择PTO模式、单段操作、时间基准为微秒、PTO脉冲更新和PTO周期更新。
要停止PTO输出,必须先在控制字节中禁止PTO输出,且执行PLS指令。
若不想在输出端接分压电阻,那么在PLC的1L+接线端子上接DC +5V也是可行的。








 QQ交流群
QQ交流群

