

电动轮驱动技术
电动轮作为独立的驱动部件,集电动机、传动机构、制动器等部件于轮毂内,是一种独特的驱动单元。
电动轮驱动的电动车取消了传统的机械差速器,在转向时需要调节两侧的转速来实现差速功能。
传统车辆的左、右轮是通过机械式转向梯形相连接的。一般良好路面上,左、右转向轮驱动力产生的绕主销的力矩大小基本相等,方向相反,因此相互抵消。
而电动轮驱动汽车由于各轮转矩独立可控,转弯时左、右转向轮的驱动力可以不相等,驱动力对主销轴线的力矩将不再能互相抵消,也就是说驱动转向力矩不再为零。由于两转向轮是通过转向梯形相连接的,驱动转向力矩将会驱动两转向轮转向。
因此,对电动轮驱动的汽车,在保证直线行驶稳定的同时,理论上按照一定规律,实时控制左、右转向轮的输出转矩,将可以利用产生的驱动转向力矩实现助力转向的作用。
电动轮驱动技术简介
电动轮驱动技术是用四个或多个独立控制的电动轮,来分别为车辆的车轮提供驱动转矩。动力源与车轮之间没有机械传动环节。典型的电动轮结构如图7-1所示。
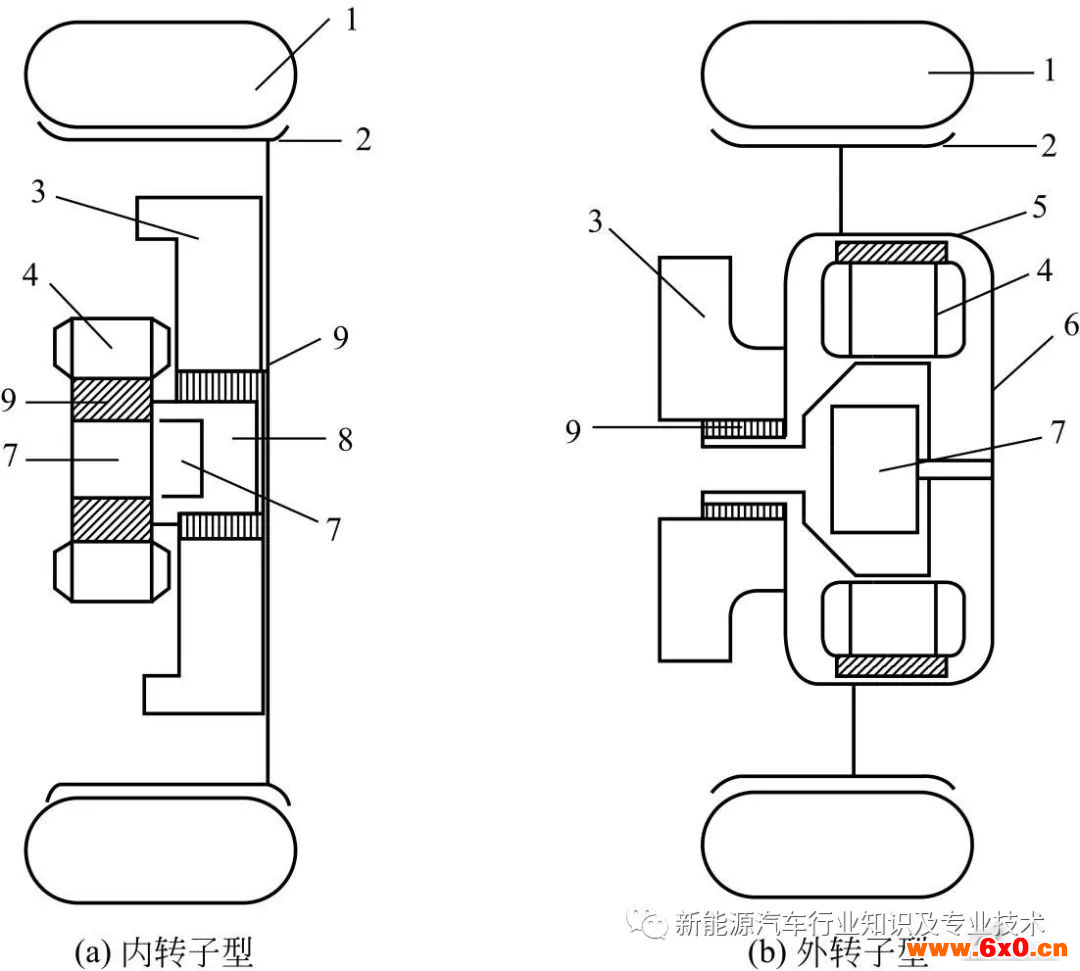
图7-1典型的电动轮结构
(1)电动轮驱动动力系统结构形式及特点电动轮动力系统主要分为两种结构形式:一种是基于内转子型电动机的电动轮系统;另一种是基于外转子型电动机的电动轮系统。图7-2所示为这两种电动轮系统的结构简图,图(a)中转子在永磁体内部;图(b)中转子在永磁体外部。
图7-2电动轮系统结构简图1—轮胎;2—轮辋;3—制动器;4—定子绕组;5—永磁体;6—转子;7—电机控制器;8—减速齿轮;9—轴承
目前,基于内转子型电动机的电动轮系统,采用高转速低转矩特性的电动机。为了满足车轮实际转速的要求,通常需匹配一个相应的行星齿轮减速机构。基于外转子型电动机的电动轮系统,则采用低转速高转矩特性的电动机。由于转速范围符合车轮实际转速要求,通常无需匹配减速机构,由电动机外转子直接驱动车轮。典型的电动轮系统布置形式如图7-3所示。四个电动轮作为独立驱动元件驱动汽车。
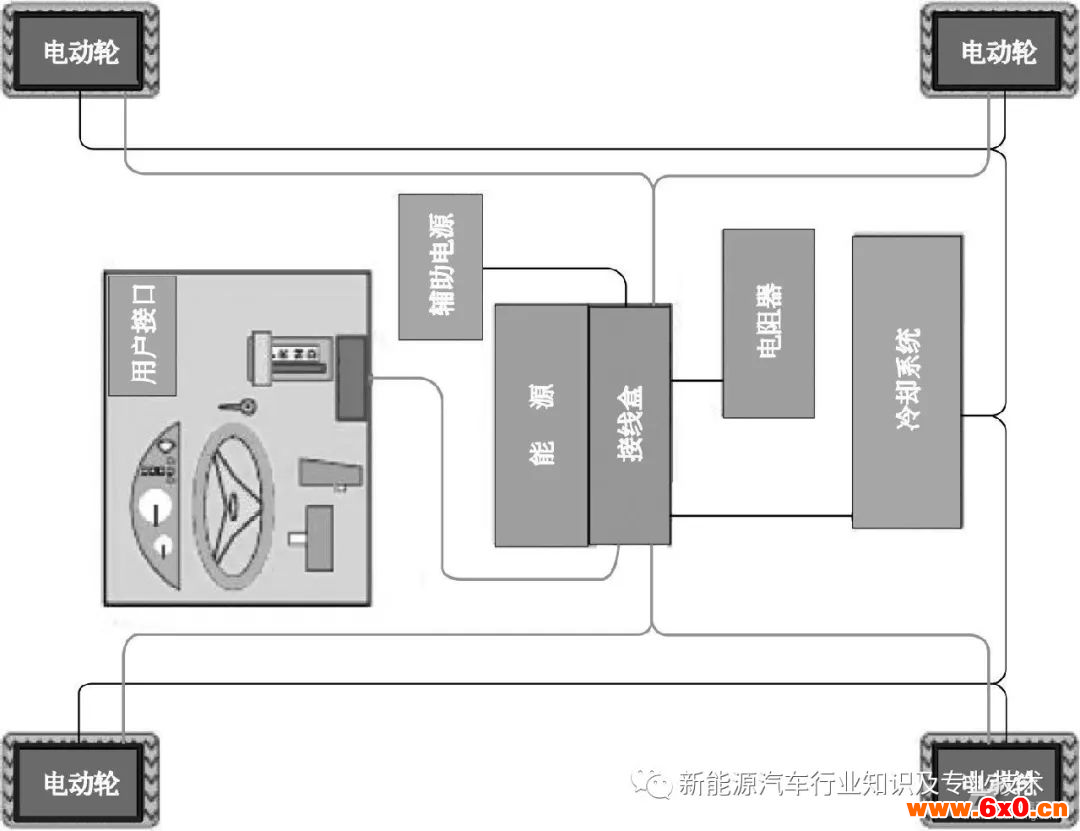
图7-3电动轮系统布置形式
声明:本文为转载类文章,如涉及版权问题,请及时联系我们删除(QQ: 2737591964),不便之处,敬请谅解!








 QQ交流群
QQ交流群

