

摘要:永磁同步电机(PMSM)的大量使用使得对其研究越来越多,采用直接转矩控制(DTC)的PMSM因其良好的响应性,容错能力,结构简单而被大量使用。但是其本身特点也会造成转矩脉动,多年来对PMSMDTC转矩脉动的抑制研究也出现不少成果,各有优缺点,本文提出一个基于滑模控制(SMC)和空间矢量脉宽调制(SVPWM)技术的对PMSMDTC转矩脉动抑制的新方法,采用滑模控制取代两个滞环比较器,得到交直轴参考电压,再用SVPWM技术调制参考电压。这样就将滞环比较器的带宽导致的转矩脉动解决了,还提高了精准度和响应速度,也能减小转矩脉动,仿真实验结果也证明了此方法的有效性,但是该方法也有一些缺点。还发现PI控制器的参数对系统性能有重要影响。
关键词:永磁同步电机滑模控制空间矢量脉宽调制直接转矩控制转矩脉动抑制PI值
1.前言
这些年永磁同步电机(PMSM)的使用越来越广泛,在制造领域,在汽车行业,甚至有些动车也使用永磁同步电机。原因是PMSM其独特的有点,功率密度大,材料环保,结构简单,控制容易。在PMSM的控制中,直接转矩控制(DTC)是重要的组成,DTC技术起步相对于磁场定向控制(FOC)晚,但是拥有控制简单,容错能力强,响应速度快等优点。DTC也有其缺点,特别是传统的PMSMDTC采用滞环比较器来控制磁链和转矩,造成了不可避免的转矩脉动,再加上其他原因造成的转矩脉动,DTC控制效果没有FOC效果好,但是这些年在抑制DTC脉动方面,科研人员作出了巨大的努力,方法很多,效果参差不其,比如有增加0矢量的,有细分区间的,有增加基本矢量的,有使用神经网络控制的等等,其中很多要么没有去掉滞环比较器,要么非常复杂,或者效果不好,本文使用SMC与SVPWM技术来减小PMSMDTC转矩脉动,即去除了滞环比较环节也不大幅度增加系统复杂程度,仿真结果也显示本方案对转矩脉动抑制效果很好。
2.PMSMDTC技术及其转矩脉动原因
直接转矩控制技术产生于上世纪80年代,最初运用在异步电机控制上,之后才运用在永磁同步电机上。我们可以通过图2-1简单分析其基本原理,在矢量条件下,定子电压可以分为与定子磁链Ψ s平行的分量uST和垂直分量usn,两个分量可以控制定子磁链的幅值和转速,我们知道电气时间常数比机械时间常数小很多,所以我们认为在改变定子磁链的时候,转子位置几乎没变化,也就能改变δST的大小。根据
我们可以知道控制了磁链的幅值和转速就能控制电磁转矩。这就是PMSMDTC原理。实际操作的时候是采用滞环比较控制磁链的幅值和转矩幅值(磁链转速意义上等同于电磁转矩),设定一个定子磁链范围和一个电磁转矩范围(上下限),每当磁链或者转矩碰到限值时就会触发开关进行一次电压选择,达到控制电磁转矩的目的。

DTC转矩控制的转矩脉动原因很多,主要的有其控制策略采用的滞环比较本身的带宽就导致磁链和转矩不是一个精确值,而是一个范围,并且带宽不能太小或者太大,太小会使得开关频率增加,损耗增加,可控度下降,甚至引起更严重的转矩脉动,带宽太大就直接增加了脉动幅值。在低速时效果也不好,定子电阻分压较大,不能忽略。而DTC中计算磁链时把定子电阻忽略了。其他原因还有硬件测量精度问题,电机电器参数实时改变问题,控制精度问题等。
3.SMC技术
滑模控制(SMC)也称滑模变结构控制,是上世纪50年代由前苏联Emelyanov等人提出,经Utkin等人进一步研究而发展起来的一类非线性控制系统的综合设计方法。变结构是通过切换函数来实现的。一个控制系统可以设计出若干个切换函数,当系统的状态向量所决定的切换函数值随着它的运动到达某特定值时,系统中一种结构转变成另一种结构。滑模控制本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性,即一种使系统“结构”随时间变化的开关特性。该控制特性可以迫使系统在一定条件下沿规定的状态轨迹做小幅度、高频率的上下运动,即滑动模态或“滑模”运动。这种滑动模态是可以设计的,且与系统的参数及扰动无关。这样,处于滑模运动的系统就具有很好的鲁棒性,能够快速响应,物理实现简单等特点,但是滑模控制也有抖动问题,会减小系统稳定性。
4.SVPWM技术
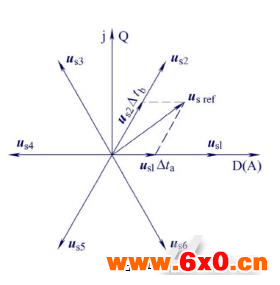
SVPWM即空间矢量脉宽调制,其基本原理是基于平均值等效原理,即在一个开关周期T内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等,如图4-1所示,在求得我们需要的电压usref后,可以利用所在区域相关的两个基本电压矢量来合成usref,使得

实际运用中会增加0矢量进去,因为有时时间不匹配。使用SVPWM能显著的提升DTC控制性能和减小转矩脉动,因为SVPWM没有使用滞环比较,而是直接求取参考电压并输出参考电压,所以理论上它是精确控制磁链和转矩的,而且开关频率还恒定。SVPWM也会有其他原因造成的转矩脉动,硬件问题,参数准确问题,测量精度与控制精度问题等。
5.仿真及讨论
使用控制变量对比实验,不变量为仿真时间0.4s;电源直流310V;逆变器模型为3桥臂IGBT和反并联二极管,缓冲电容无限大,缓冲电阻1e5Ω,导通电阻1e-3Ω,Tf:1e-6Tt:2e-6;电机模型3相隐级式,定子相电阻1.2Ω,交直轴电感均8.5mH,指定永磁体磁链大小0.175V.s,电压常数126.966,转矩常数1.05,转动惯量0.0008,黏着系数0,极对数4,其余均为0,转子磁链定向于A轴;负载在0-0.2s为0,在0.2s-0.4s为1.5N.m;转速600r/min。变量为控制策略,一个使用传统PMSMDTC控制方法,另一个使用SMC-SVPWM-PMSMDTC控制方法,实验结果采集转子转速,定子磁链和电磁转矩波形图进行对比分析。
首先进行传统PMSMDTC实验,首先是仿真建模,如图5-1所示,给定转速,通过PI调节得到需求转矩(P=0.1,I=5),磁链给定,两个滞环比较器的带宽为0.004,开关表没有0矢量,该系统为有速度传感器控制。负载转矩在0.2s从0升到1.5N.m。


仿真结果如图5-3到5-8所示,5-3、5-5、5-7来自传统PMSMDTC仿真结果,5-4、5-6、5-8来自SMC-SVPWM-PMSMDTC仿真结果,从图中我们可以看出相对于传统的PMSMDTC控制,SMC-SVPWM-PMSMDTC控制的速度响应更快,转速跟随效果更好,转矩脉动抑制的效果明显,磁链脉动也有减小,提升了整个电机系统的稳定性和精确性,原因就在于滑模控制和空间矢量脉宽调制技术的结合运用,以滑模控制取代滞环比较器,使得带宽导致的主要脉动消失,SVPWM精确构造需要的定子电压,因此能大幅度的减小转矩脉动和磁链脉动。不足点也有,就是转速的超调量过大,负载变化时,转速变化相对于传统DTC更大,转矩的超调量也大,磁链上升慢,其原因主要是滑模控制的敏感性和抖动,还有PI控制器的参数设置问题,好的PI值参数会大幅度提升系统性能,反之则会大幅度减弱系统性能。
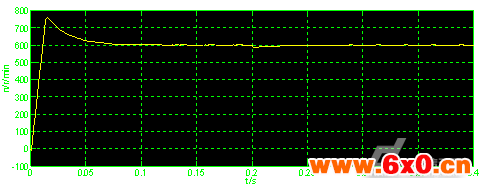
图5-3
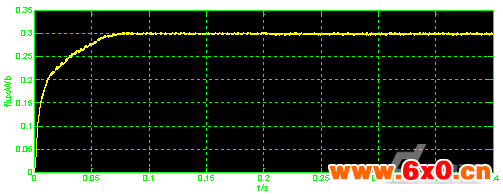
图5-4
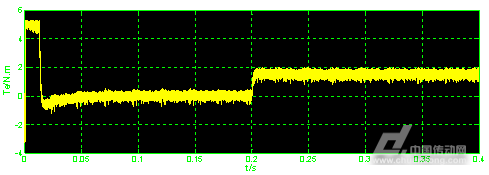
图5-5

图5-6
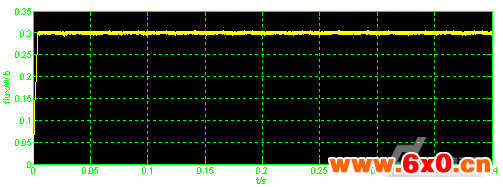
图5-7
图5-8
6.结论
传统PMSMDTC控制转矩脉动明显,但是响应快,改进后的SMC-SVPWM-PMSMDTC有效的抑制了转矩脉动,并且还改善了磁链脉动和转速响应时间,新系统的缺点是敏感,来源于滑模控制特性,在负载改变或者开始时超调量过大,磁链响应慢。
参考文献
[1]杨影,陈鑫,涂小卫,韩冰.占空比调制的永磁同步电机直接转矩控制[J].电机与控制学报,2014,1804:66-71.
[2]李杰,韩峻峰,潘盛辉.基于SVPWM的电动汽车直接转矩控制方法研究[J].机电工程,2014,3107:898-902.
[3]丁硕,崔总泽,巫庆辉,常晓恒,胡庆功.基于SVPWM的永磁同步电机矢量控制仿真研究[J].国外电子测量技术,2014,3306:81-85.
[4]朱儒,刘鲲鹏,赵志锋,王永.永磁同步电机滑模控制研究[J].微电机,2014,4712:52-55.
[5]贺宇轩,解小华,张爱春.基于滑模变结构控制的永磁同步电机[J].吉林大学学报(信息科学版),2015,3301:12-18.
[6]王善华,杨龙,王保升.基于SVPWM的永磁直线同步电机直接推力控制[J].组合机床与自动化加工技术,2015,06:93-95+100.
[7]沈涛,李桥梁.基于SVPWM的永磁同步电机控制系统的仿真研究[J].电气开关,2008,01:19-21+62.
[8]郑博元,张荣建,胡建辉,徐永向.基于PI的永磁同步电机转矩脉动抑制研究[J].微电机,2016,4907:32-34+67.
[9]李世霖.基于直接转矩控制的永磁同步电机转矩脉动抑制研究[D].大连海事大学,2017.
[10]林莉.永磁同步电机单环模型预测控制转矩脉动抑制[D].西南交通大学,2017.
[11]杨建飞.永磁同步电机直接转矩控制系统若干关键问题研究[D].南京航空航天大学,2011.
[12]崔茂振,张昌凡,朱剑.永磁同步电机滑模调速控制及其实现[J].电子测量与仪器学报,2012,2601:84-92.
[13]贾洪平,贺益康.永磁同步电机直接转矩控制中零矢量的作用研究[J].电气传动,2006,04:13-16+29.
[14]袁雷.现代永磁同步电机控制原理及MATLAB仿真[M].北京:北京航空航天大学出版社,2016.105-121








 QQ交流群
QQ交流群

