

摘要:本文首先探讨了机器人进行救援或辅助救援的应用策略与应具备的功能,对需克服的非结构化地形环境进行研究,对其特征进行并提取与和简化地形特征,提出了煤矿救灾机器人机械系统的性能要求与指标,采用分形插值与三次样条插值运算的方法模拟了三维真实地形,有利于其机械系统的动力学仿真与优化。采用四履带双摆臂式行走机构设计了煤矿救灾机器人,并对其实际应用分析。
关键字:矿井救灾机器人;特征提取;非结构地形;四履带双摆臂式
1 引言doubleswingarmtype
我国的煤炭资源十分丰富,是世界上最大的煤炭生产国和消费国。在我国的能源工业中,煤炭占我国一次能源生产和消费结构中的70%左右,当前,我国经济的快速增长,对煤炭工业发展提出了更高的要求。
近年来,我国煤矿事故频发。事故中,火灾和爆炸相关的事故又占了相当大的比例,而矿井下引起火灾和爆炸的主要物质是瓦斯和粉尘。煤层地质条件复杂,影响煤矿安全生产的因素多,是造成事故的客观因素。我国煤矿开采的煤层大多瓦斯含量大、透气性低且地质构造复杂,不易在开采前抽放瓦斯,大中型煤矿中,高瓦斯矿井占20.34%,瓦斯突出矿井占19.77%。小型煤矿中,高瓦斯矿井占15%左右[4]。矿井一旦发生瓦斯爆炸事故,井下人员及财产处于极度危险境地,必须尽快组织抢救,在煤矿救护过程中,由于指挥不当、违章作业、设备局限以及二次爆炸等原因造成救护人员伤亡的事故也时常发生。
综上所述,由于我国煤矿的地质特点和一些管理因素,矿难频发。矿难发生后,救护队员需冒险深入灾区进行探险、救护遇险人员等灾害处理工作。而发生灾害后,进行井下救护与灾害处理的危险性很高。迫切需要研发替代或部分替代救险队员进入矿井灾害现场进行环境探测和完成搜救任务的煤矿救灾机器人。所以,开展煤矿救灾机器人的研究对煤矿安全生产、灾害救护具有重大的现实意义与社会意义,并建立特种危险环境下的工业救灾体系具有十分重要的意义。
2 井下非结构地形建模
2.1煤矿救灾机器人的救援策略
瓦斯爆炸波及范围广、破坏程度大,造成人员伤亡多,而且灾害处理具有很大的难度和危险性,在抢险救灾的初期,受灾区域具体范围、爆源位置、瓦斯与CO浓度、巷道破坏情况均几乎一无所知,抢险救护人员面临着二次爆炸、CO中毒、顶板随时冒落的危险,以及高温的威胁。机器人可以在救护人员之前进入灾区,探测并传回灾区环境信息。煤矿救灾机器人参与救援的救援策略进行如下:
(1)切断灾区电源,通知矿山救护队,迅速成立救灾指挥部,严格按照灾害预防处理计划的要求,设立若干抢救组各行其责。
(2)体确定灾区范围,在尽量靠近灾区的安全位置建立井下救灾指挥中心,并保证井上、井下指挥中心的通讯通畅。井下救灾指挥中心的位置应该满足通风正常、瓦斯与CO浓度在安全范围之内,又可以阻挡瓦斯二次爆炸的冲击波。
(3)抢险救护人员携带必备的救护设备及救灾机器人以井下救灾指挥中心为基地,向灾区推进。救灾机器人可以作为抢险救灾人员的先行军进入灾区巷道,检测巷道内的瓦斯与CO浓度、温度等环境信息。
(4)利用多台煤矿救灾机器人对灾区核心区域的可疑巷道和工作面同时进行探测。
2.2煤矿井下非结构地形环境特征提取与简化
煤矿井下地形环境为一种特殊的非结构地形环境,井下巷道布局、轨道与人行道建造、设备布置是根据煤矿地质特点与煤炭生产的需要,按照一定标准设计、建设与安装的。因此,煤矿井下存在着一些固定形状与结构的特定地形,如道床与钢轨等。移动机器人活动的地形环境及活动长度是机器人机械系统设计的初始条件,决定了煤矿救灾机器人机械性能指标,也进一步决定了机器人行走机构形式的选择、尺寸的确定。建立符合煤矿井下特征的实际模型用于机器人仿真;并根据煤矿灾区的调研情况,确立井下一定程度的非结构的地形环境,并进行计算机模拟。
巷道断面包括机巷道的断面形状、宽度尺寸与高度尺寸。决定机器人的宽度尺寸的选择。拱形双轨巷道净宽度按下式计算。
B=a+2A1+C+t≥2.4m(2-1)
式中,B为巷道净宽度,指直端内侧的水平距离,a为《煤矿安全规程》规定的非行人侧的宽度,a≥0.3m;当巷道内安设输送机时,输送机距支护或碹墙最突出部分之间的距离,a≥0.5m。A1为输送设备的最大宽度。C为《煤矿安全规程》规定,人行道的宽度,从巷道道碴面起1.6m的高度内,C≥0.8m,在人行停车地点C≥1.0m,在1.6m至1.8m之间不得架设管、线和电缆。
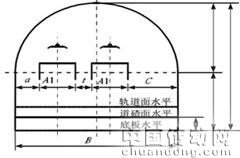
图1轨道断面
2.3三维特征地形与真实地形的计算机建模
对煤矿井下的地形环境的尺寸参数的调研与地形特征的提取与简化,采用三维制图软件,对其三维特征地形进行建模。煤矿井下独立台阶的高度多在250mm以下,人连续台阶的高度h一般取值150~180mm,台阶跨度b一般取值220~350mm,台阶宽度B一般取值
600~1200mm,连续台阶的坡度与巷道坡度常常一致,一般在8~15°之间。根据简化的特征地形与煤矿井下参见地形的尺寸,对三维特征地形进行了建模。如图2为其中的一个三维特征地形,此三维模型包括四大部分,包括凸台区、台阶区、沟道区和斜坡区。

图2 三维特征地形
2.3三维真实地形的计算机模拟与仿真
对煤矿井下非结构地形进行特征提取与简化,有利于对机器人虚拟样机进行特征障碍地形的越障运动的模拟与仿真。
2.3.1复杂地面的样条插值仿真
数字高程模型DEM是对地面环境的地形地貌的一种离散的数字表示形式,用格网点的高斯坐标(x,y)及其相对应的高程Z来表示的[5][7]。地形的三维显示首先要获取DEM数据,对于小面积的地面,可采用三维激光扫描仪获取其DEM数据。由于客观条件的限制,往往不能取得足够的采样点来满足显示和模拟的需要,因此,需要进行内插以生成更多的点。常用的插值方法有反距离权重插值(Inverse Distance Weighted)、双线性插值(Bilinear Interpolation)、趋势面插值(Trend Surface Interpolation)、样条插值(Spline Interpolation)等。MATLAB里提供了二维插值指令,其函数格式为:Z=interp2(x,y,z,X,Y,’method’)。样条插值的精度要高于线性插值和立方插值,在实际应用中最为广泛。因此,在二维插值运算选择了三次样条插值法。
选择一段3500×3600mm面积的起伏地形,采用一组单格为250×300mm的垂直正交的网格,测量每一网格交点上的高度,获得该地形的一组规则的二维矩阵高程值。数据进行三次样条插值运输,插值点构成的新的网络参数X、Y的间隔分别为30mm、60mm。插值运算后,生成的三维曲面图如图3所示。
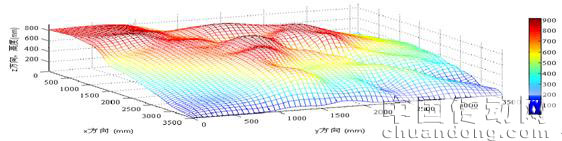
图3 采用原始数据样条插值后生成的曲面
3矿井救灾机器人的机械系统与行走机构构型研究
3.1行走机构构型研究
履带式行走机构是轮式行走机构的拓展,履带本身起着给车轮连续铺路的作用。常见的履带式行走机构为方形履带,其结构简图如图4所示,该行走机构由悬架、驱动轮、导向轮、承重轮、托带轮与履带等部分组成,其驱动轮及导向轮兼作支撑轮(承重轮),支撑地面的面积大,稳定性好。

图4 方形履带式行走机构
四履带双摆臂履带机器人的越障机理
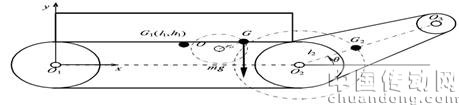
图5 机器人的质心轨迹
建立图5所示的以机器人后履带轮轴心为坐标原点的坐标系xo1y,设机器人主履带部分前后两履带O1O2的间距为l0,主体部分质量为m1,质心G1的坐标为 (l1 ,h1),在攀越典型障碍时,需两摆臂同步摆动,因此设两摆臂的质量为m2,质心为G2,处于摆臂中心线O2O3上,距离前履带轮轴心O2的长度为l2,设摆臂两履带轮轴心的间距为l3,摆臂的摆角为θ,且θ∈[0,2π],设主体履带轮半径为R,摆臂前履带轮半径为r,均含履带厚度,机器人宽度为b,则机器人的质心(xG, yG)的坐标为摆臂履带机器人的质心满足以下关系

摆臂履带机器人的质心满足以下关系:
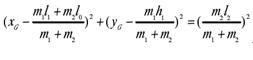

机器人的质心随着摆臂摆角θ的变化的轨迹是以 | 为圆心O,以 |
为半径的圆。
四履带双摆臂机器人正向攀越台阶的过程如图6所示,机器人借助摆臂的初始摆角,在履带机构的驱动下,使其主履带前端搭靠在台阶的外角线上,机器人继续移动,驱动摆臂顺时针摆动,当机器人重心线越过台阶外角线时,机器人以该外角线为支线向台阶上平面翻转,则机器人成功的攀越台阶。

图6 机器人正向攀爬台阶的过程
一旦机器人主履带搭靠在台阶外角线上,根据台阶高度,将有3种攀爬方法:
其一,主履带与摆臂履带成一条线,采用类似固定履带的攀爬方式,靠机器人的重心线越过外角线,翻转至台阶上部平台,此过程如图4-18A所示。此时机器人履带总长度为

其二,当台阶的高度小于或等于摆臂的长度(H ≤l3 +r-R)时,转动摆臂,可保证机器人摆臂不离地的情况下,机器人主车体平稳地放平在台阶的上部平台。当机器人主车体平放在台阶的上部平台后,机器人运动保证机器人质心移动过台阶外角线,机器人攀越台阶成功,如图
| | 所示。这种攀越方式,机器人越障平稳,不会受到跌落冲击。 其三,当台阶的高度大于摆臂的长度(3H >l +r -R)时,可借助摆臂转动,使机器人质心向台阶外角线靠近并越过台阶外角线,完成攀越台阶的动作。 机器人跨越台阶的高度H与θ、β具有以下关系: |
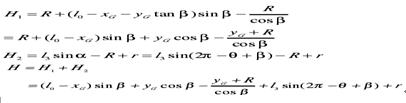
H的最大值Hmax即为机器人反向攀爬台阶是的台阶高度的最大值。H对θ求偏导等于0,
在攀爬台阶的时候,当摆臂的摆角θ与机器人主体的倾角β取上面关系式时,H存在最大值。当机器人摆臂的质量较小,对机器人的质心位置影响较小,可忽略时,摆臂处于竖直位置,即 时,H有最大值。
时,H有最大值。
4结论
本文根据煤矿井下尤其是发生瓦斯、煤尘爆炸事故后的非结构化的地形环境和爆炸性气体环境,灾难发生后,现场环境非常复杂危险,决策者和救援人员由于缺少信息无法及时做出决策和判断,导致许多被困人员因救援不及时而丧生。因此,为顺利开展救援工作,减少人员伤亡,研究替代或部分替代救援人员进入灾难现场进行环境探测的搜索机器人具有重要的现实意义。本文以灾难救援为研究背景,研制了一种多节履带式搜索机器人机械系统,并开展了搜索机器人动力学分析跨越障策略等关键技术的研究。
参考文献
1.林柏泉我国煤矿安全现状分析[N]中国矿业报,2006.3.3.
2.宋元明,任锦彪煤矿井下灾害调查与研究[J]矿山安全,2005.3.
3.谢颖非结构化道路导航图像的特征提取与分类[D]南京:南京理工大学,2008.6
4.黄永安,李文成,高小可.Matlab7.0/Simulink6.0应用实例仿真与高效算法开发[M].北
京:清华大学出版社,2008.
5.柯正谊,何建邦,池天河数字地面模型[M]北京:中国科学技术出版社1993.
6.李允旺,葛世荣,朱华,刘建.四履带双摆臂机器人越障机理及越障能力研究[J]机器人,2010,32(2):157-165.
7.谢顺平,都金康,罗维佳,邓敏基于DEM的复杂地形流域特征提取[J]地理研究,2006.1
8.孙斌.便携式地面移动机器人运动分析及控制[D]长沙:国防科学技术大学2006.
9.许世范.工业机器人在矿山应用前景展望[J]煤矿自动化,1993(1):28-31.








 QQ交流群
QQ交流群

