

摘要:本文主要介绍了SoMachineM258系列PLC在数控双头精密切割锯上的成功案例,主要采用了CANopen现场总线实现对运动控制部分的数据采集与控制,本文重点介绍了工艺原理、结构特点、工艺流程、控制方案等。
01、前言
近年来,随着我国大规模的基建投资和工业化进程的快速推进,铝型材作为建筑领域和机械工业领域里重要的应用材料,其整个行业的产量和消费量迅猛增长,我国也一跃成为世界最大的铝型材生产基地和消费市场。
本文中的应用客户系专业从事塑料门窗加工设备的研发、制造和销售的中国顶级品牌企业,在国内率先研发出数控双头精密切割锯、木门窗加工中心等高精尖设备,填补了行业空白。
该设备主要用于铝、塑门窗及幕墙等型材的角度锯切加工,两个锯头可单独工作,也可同时工作,在45°到157.5°之间可实现任意角度旋转。该设备具有操作简单、性能可靠、技术先进、易于维修保养、切削速度高、加工精度高、生产效率高等优点。
02、工艺简介
1、设备外观

数控双头精密切割锯LJB2B-CNC-500x5000是生产塑钢、铝型材门窗的主要切割设备,可完成对型材的长度、两侧倾斜角度的精确切割。
2、结构特点
该设备由定位机构、左锯头、右锯头、气动系统、电气控制系统组成,其中定位机构采用全闭环控制方式,提高了定位精度与工作效率;同时,具有型材切割优化功能,使每一根型材在切割完成后所产生的废料减少至最小,大大节约了生产成本。
电气控制系统全部采用施耐德电气整体解决方案,PLC与伺服系统之间采用CANopen总线控制方式,PLC与HMI之间采用标准Modbus总线控制方式,PLC与上位机之间采用工业以太网控制方式,安装方便、减少了硬件接线过多造成的潜在隐患点、抗干扰能力强。
3、工作原理
主要工序为锯切定位、型材压紧、型材定位、锯切等,传动系统采用伺服系统与进口减速机进行控制,使定位精度精确至0.1MM,切割角度精度精确至0.01°,通过HMI对加工工艺参数进行设置,由上位机管理软件对型材进行优化切割,将控制数据传输至PLC中。
4、工艺流程
Ⅰ、设备上电后,按下“回零”按钮,定位机构与两个锯切机构执行回原点功能,原点回归完成后,将实际定位数据写入至伺服系统;原点回归采用反转找Z相的方式,提高原点回归的定位精度,同时,可重复执行原点回归功能。
Ⅱ、按下“锯切电机”按钮,启动锯片旋转;通过HMI设定加工型材的加工数据,并选择适合的工作模式,这些数据全部存储在PLC中。
Ⅲ、按下“定位运行”按钮,定位机构定位至设定长度位置,锯切机构定位至切割角度位置。
Ⅳ、放入后型材,按下“启动”按钮,型材夹紧-锯片前进-锯片后退-夹紧松开-取下型材。
5、设备性能指标
电源:三相四线,380V,50Hz
锯切电机:2×2.2KW,转速:2800r/min
伺服电机:3×0.75KW,转速:3000r/min
工作压力:0.5~0.8Mpa
供气量:60L/min
锯切长度:900mm,max5000mm,min480mm
锯切长度:450mm,max5000mm,min760mm
锯切宽度:120mm
锯切高度:230mm
锯切角度:45°~90°~157.5°之间任意角度旋转
进刀速度:0~3m/min
移动速度:0~20m/min
锯片规格:φ500×4.4×φ30,Z=120
外形尺寸:6800mm×1500mm×2040mm
重量:2500kg
03、控制系统的技术要求与控制方案
1、技术要求
PLC:DI:26点,24VDC;DO:16点,Tr,24VDC,0.5A。
HMI:7寸,65535色,TFT,RS485。
Motion:一台LXM32M控制定位机构,外部磁栅尺接入LXM32M,形成全闭环控制,确保定位精度,两台LXM23A控制锯切机构上位机系统:采用VB开发的界面,具有型材优化,加工样式保存与导入等功能,与PLC之间采用工业以太网通讯。
2、控制方案
控制系统以M258系列PLC为核心,通过集成的CANopen主站通讯口连接1台Lexium32M系列伺服系统和两台Lexium23A系列伺服系统,实现点动、回原点、绝对定位控制等功能。
PLC与伺服系统之间通过CANopen总线的PDO或SDO数据交换方式,可实时获取当前位置、当前速度、状态字等信息,也可修改及调用伺服系统的各内部运动任务,实现设备的控制需求。PLC与HMI之间采用标准Modbus通讯协议进行交换数据,各工艺参数均可通过HMI进行设置或监控。上位机采用VB开发的界面,具有型材优化,加工样式保存与导入等功能,与PLC之间采用工业以太网通讯实现数据交换,对设备各工艺环节的监控。

3、控制难点分析
Ⅰ、定位精度;定位机构最大行程为5M,传动机构为同步带,常规的脉冲控制难以解决机械误差造成的定位精度等问题,如果使用补偿的方式也可保证定位精度,但在一定程度上牺牲了定位速度,降低了工作效率。
解决方案:在整个定位机构的导轨上安装一个外部磁栅尺,直接接入至LXM32M伺服系统,使外部磁栅尺与伺服系统行成全闭环,不但可以确保定位精度,也可保证定位速度,提高工作效率。
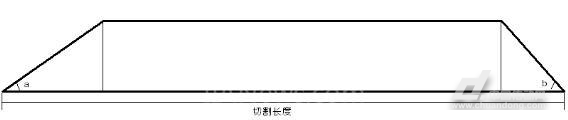
Ⅱ、切割长度计算;解决方案:如图所示,在设置切割长度时,我们是以切割型材的两个底边的长度来设置的,由于两个侧边需要切割角度的不同,定位机构所要走的距离也会不同,实际行走的距离=切割长度-型材度/Sina-型材高度/Sinb,里面涉及到三角函数的运算,同时,还要把锯片的厚度也要计算在三角函数内。
通过SoM中灵活的编程语言,使用ST语言对这些数据机型高精度浮点数运算后,再转换为脉冲数控制伺服系统进行定位。
Ⅲ、伺服系统每次原点回归的位置不一致?原点回归模式为遇到原点信号之后反转找到伺服系统的Z相后停止,在原点信号非常接近伺服系统Z相信号的情况下,如果原点信号响应时间快,则会发生反转时立刻就会抓到伺服Z相的现象,而原点信号响应时间慢时,则会发生反转时伺服Z相到达而原点信号还未到达的现象,造成原点回归停止在伺服第二次Z相信号位置;
解决方案:轻微移动原点信号,使其在触发时大约在伺服相对Z相点的半圈位置。

04、应用总结
本系统采用了施耐德电气整体解决方案,具有以下几大优势:
●PLC与伺服系统之间采用CANopen总线控制方式,消除了常规控制方式所带来的种种不安全潜在因素,不需要改变任何硬件接线的多模式自由切换方式使控制更加灵活,数据信息的实时反馈确保系统稳定运行,通过总线控制方式,有效降低了生产成本,减少了配线工作量,为未来设备的扩展与更新提供了便利条件;
●提高了设备运行的稳定性。由于原方案的三台伺服采用脉冲信号控制,设备经常出现运行不稳定的现象,且无法实时反馈伺服系统的数据信息,改善了此弊端;
●提高了设备生产效率。采用施耐德电气方案后,生产速度可达20m/min。生产速度提高10%,设备运行稳定性相比以前提高10%;
●人性化的编程界面,多种语言混合编程模式,操作简单,使用方便。








 QQ交流群
QQ交流群

