

摘要:针对火电厂锅炉的过热汽温调节特性差、经常出现过热器汽温超调的问题。根据模糊控制理论,对主汽温控制回路进行了改进,提出了一种基于模糊逻辑主蒸汽温度PID控制器,结合模糊逻辑控制和传统串级PID控制各自优点,设计混合型模糊主蒸汽温度PID控制系统;并在MATLAB上进行了仿真试验,结果表明,与传统串级PID控制系统相比,主蒸汽温度模糊串级控制具有良好的动态调节品质和较强的鲁棒性。
关键词:串极控制模糊PID控制Matlab
Main Steam Temperature Fuzzy Controller of Thermoelectric Power Station Boiler
Abstract:To solve the problems of thermal power plants, such as poor regulation performance of superheated steam temperature and overshooting of superheated stem temperature,the control circuit for the main steam temperature was improved based On the fuzzy control theory. It proposed one kind of fuzzy logic main vapor temperature PID controller,together with the union fuzzy logic control and traditional cascade PID controls the respective merit,and design a mixed type fuzzy host vapor temperature PID control system; and it did the simulation test in Matlab. Finally indicated that compares with the traditional cascade PID control system,the main vapor temperature fuzzy cascade control has good dynamic regulation quality and strong robustness.
Key words: fuzzy logic control;cascaded control;MATLAB
引言
过热蒸汽温度是火电厂锅炉运行质量的重要指标之一,过热汽温过高或过低都会显著地影响电厂的安全性和经济性。
改善锅炉主蒸汽温度控制的必要性:理论上,主汽温越高,机组的经济性越好,但安全性差;主汽温越低,机组的经济性越差,但安全性好。而在火电机组运行过程中发现,运行人员调解主蒸汽温度频繁,劳动强度比较大,特别是机组负荷扰动比较大时,很容易超温,在这种情况下,过热汽温表现为非线性、大惯性、参数时变和不确定因素的典型复杂系统。常规的机组控制方案结合前馈补偿、变参数、串级等控制策略,已无法满足上述复杂控制系统的要求,减温水自动无法保证长期正常投入运行,只能用来维持生产过程的平稳运行,复杂工况需要运行人员大量的手工操作和监督控制,机组运行参数偏离经济指标较大,严重影响机组的经济效益和安全可靠运行。其中,尤以I级减温水调节表现为调节特性差,响应速度慢,经常因为温度偏差大导致自动退出,影响主汽温的控制,故需要采用先进控制策略对控制回路进行优化。常规PID控制器是建立在被控对象精确数学模型基础之上的,而模糊控制不要求被控对象的精确模型且适应性强。模糊控制主要是模仿人的控制经验而不是完全依赖于控制对象的模型,因此模糊控制能近似地反映人的控制行为,而无需建立对象的数学模型,有很强的鲁棒性。为此本文提出了一种锅炉主蒸汽温度模糊控制器。
1被控对象的数学模型
通过对现场机组不同负荷下的扰动试验,采集扰动试验下的减温水对象数据,分析试验曲线,采用T.S模糊模型辨识方法,拟合试验曲线,可近似得到不同负荷下的广义汽温对象模型,分析汽温对象模型可知,时间常数和阶次随负荷递减呈现递减的趋势,选取50%,100%的汽温对象模型在MATLAB里搭设串级调节回路,PID参数通过
准则确定后,进行仿真。但实际中,因煤种的变化和负荷工况的变化,并不能完全满足主汽温的控制要求,考虑到模糊控制器能实现非线性,变参数的调节性能,故对主汽温控制回路采取模糊控制器和PID控制器联合控制的办法。本文建立了600MW直流锅炉过热汽温对象的数学模型。见表1。
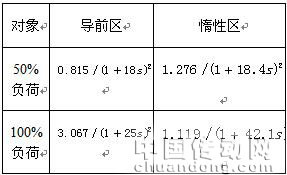
表1特定负荷下汽温对喷水扰动的动态特性
2模糊PID复合控制器设计
模糊PID系统是将传统的串级PID控制与模糊控制器有机地结合起来。即在传统的串级PID控制方案中采用模糊控制器作为主回路调节器,副回路调节器依然不变,从而建立起混合型模糊PID系统。该系统主要有外回路和内回路组成,内回路(副回路)调节器依然采用PID控制,克服系统内部扰动,消除内部静态偏差作用,外回路(主回路)调节器采用模糊控制器,充分利用模糊控制的动态调节特性克服外部扰动给系统带来的影响。
2.1系统结构原理
主蒸汽温度模糊PID控制系统的执行机构由一级减温器和二级减温度器组成,一级减温器起到粗调作用,二级减温器起到细调作用。模糊控制器将主汽温偏差和偏差变化率转换为模糊量,经过模糊控制规则的处理得到模糊输出量,最后将模糊变量去模糊化处理得到精确值,作为副调节器PID2的参考输入信号。模糊控制系统的结构主要有模糊控制器和被控制对象两部分组成,其结构如图1所示。经过主蒸汽流量修正的输入r为系统设定值(精确量)。e=r—y为系统误差,ec=de/dt为误差变化率(精确量),y为系统的输出量(精确量)。误差e和误差变化率ec作为输入信号进入模糊控制器。U为输出阀门的开度,作为模糊控制器的输出,经过反模糊化去控制被控对象。
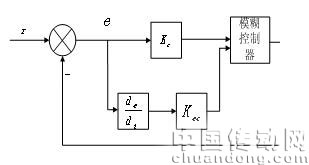
图1 模糊控制系统结构图
2.2模糊控制器的设计
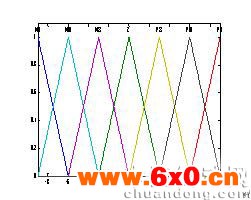
模糊控制器的设计关键是模糊控制规则的获取,通过对现场数据的统计分析,计算出屏过出口温度的最大偏差,屏过出口温度变化的最大速率以及阀门开度的最大变化量,并将该数据设为语言变量的论域。根据语言变量的论域,论域子集,选择三角形函数确定隶属度函数如图2一图4所示。
| 图2e的隶属函数
|
图3ec的隶属函数
|
| 图4u的隶属函数 |
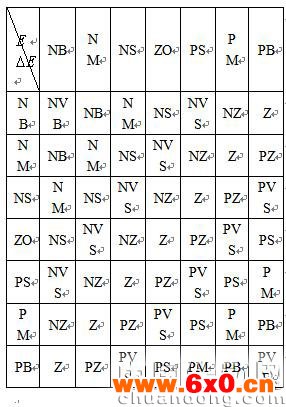
模糊规则如下表2。
表2 模糊规则表
 |  |
3Matlab的仿真实验
3.1主气温控制系统的simulink仿真比较
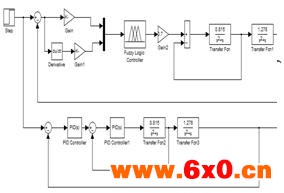
本文讨论的主汽温控制系统的基本结构采用串级控制系统,其中主回路采用采用模糊控制器,副回路采用PID控制器。模糊PID串级控制系统仿真框图如图5所示。在Simulink仿真界面里将设计好的模糊控制器加入到整个控制回路中,其中各参数整定好,即可实现控制回路的仿真
| 图5模糊PID串极控制仿真模型
| 图7100%负荷Matlab仿真图形 |
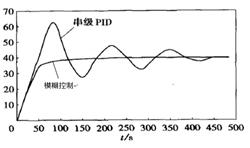
| 图6模糊控制与PID控制的曲线图 | 图8 50%负荷Matlab仿真图形 |
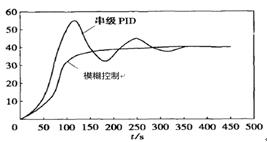
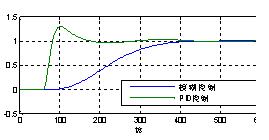
从图6中可以看出,模糊控制与串级PID控制相比,过渡时间短,较快进入稳定,无超调,动态调解品质好。
3.2被控对象在不同负荷下的仿真图形
为了验证所设计的FC对主汽温对象控制效果,本文采用了600MW直流锅炉过热汽温对象在100%和50%两种负荷下的动态特性来仿真,模糊控制系统和传统的串级PID控制系统的性能相比,来分析此种控制系统在理论和工程上的可行性。仿真结果如图7和图8所示。
4结论
提出基于模糊调整的控制策略,将该策略应用到火电厂锅炉主蒸汽温度的控制系统中。与串级PID控制控制相比,模糊控制器利用推理机产生的控制策略,实现了对系统的快速无超调控制。同时使系统具有良好的稳定性和鲁棒性,仿真结果表明了该方案的有效性和优越性。
参考文献
[1]陈钢.火电厂主汽温模糊控制优化[J].华东电力2008,36(8):88-91
[2]陈景通,李忠舒.火电厂锅炉主汽温模糊控制系统的研究[J].沈阳师范大学学报2010,28(4):510-513








 QQ交流群
QQ交流群

