

摘要:本文主要介绍了观音岩2×1600KN双向尾水门机的特点及电气系统的设计,着重介绍了本电气系统的硬件、软件设计流程,并针对现场情况给出了起升机构的调试参数,且针对本门机调试过程中容易出现的常见故障给出了具体的解决办法。
1引言
我单位为观音岩水电站自主研发设计的2×1600kN双向门式启闭机安装在观音岩水电站厂房尾水坝顶平台,2×1600kN起升机构双吊点运行,通过液压抓梁启闭发电系统尾水检修闸门和防洪闸门,并起吊闸门孔口盖板。本门机的电控系统采用目前国际上先进的“触摸屏+PLC+变频器”控制方案,整机具有以下优点:
- 大吨位高扬程。本门机起吊吨位高达3200KN,且扬程高达73.5米,其中轨下60米,轨上13.5米。
- 小车起升机构采用双吊点机构形式,由两套驱动装置及两套折线卷筒装置组成,实现起升机构多层缠绕。
- 起升机构采用主从控制技术来保证两起升机构的速度和转矩的一致性。
- 采用先进的触摸屏监控技术,使整机具有良好的人机对话和高品质的信息处理功能。
- 通过PLC来采集各种信号,运用PLC内部的虚拟触点来实现整机的时序逻辑控制,大大减少控制柜内的中间继电器和时间继电器,从而减少了电气系统的硬件故障,提高了系统控制的可靠性。
- 各传动机构均采用安川H1000系列变频调速控制方式,调速比高达1:20。
- 完备的安全保护功能。本机除具有电控系统必需的短路保护、过电流保护、失压保护、缺相保护、接地保护、零位保护、限位保护、超载保护、主隔离开关以及断开总电源的紧急开关等常规保护外,还具有荷重保护、起升高度限制和超速保护等。
2电气系统的设计
本门机的电气系统主要包括供电系统、起升机构控制系统、小车行走机构控制系统、大车行走机构控制系统、液压抓梁控制系统、安全保护系统、照明和接地、防雷保护系统。
2.1供电系统
本机供电采用电缆卷筒供电,电源为三相四线AC380V,50HZ,控制电源为AC220V,由专用变压器提供。
总电源设有隔离刀开关Q1,能切断本机的所有电源,为安全检修提供了一个明显的断开点,并设有断路器QF01,只作短路保护。一般情况下QF01不动作,用总接触器KM1来合上或断开总电源。QF01中附有分励脱扣线圈,由电源柜上的急停按钮来控制,只有在总接触器因某种原因无法正常切断电源回路的紧急情况下,才偶然使用一下分励脱扣装置。
2.2起升机构控制系统
起升机构载荷为典型的位能性负载,由两台QABP315M8A75kW变频电机驱动,采用两台日本安川H1000系列变频器分别传动,闭环控制。两台变频器之间采用主从控制,保证两台电机转矩和速度一致。起升机构具有各种故障自诊断及显示报警功能,包括瞬时过电流保护、瞬时断电失压保护、接地保护、冷却风机异常、超频(超速)保护、接触器粘结、缺相、控制器零位保护、超载保护等等。
⑴速度指针:
轻载时0.44~4.4/min(Q≦300KN)
重载时0.22~2.2/min(Q≧300KN)
⑵调速方式:
由荷重仪输出的轻、重载状态以及联动台上转换开关来判断是否轻载,并由联动台主令开关的挡位元来决定速度。正反各五挡,轻载时分别为20%、60%、100%、150%、200%额定速度,其中前三挡为恒转矩调速,第四、五挡为恒功率调速;重载时分别为10%、20%、40%、70%、100%额定速度,为恒转矩调速。系统采用主令挡位开关量输入至PLC,经软件处理后,再由PLC输出开关量信号给变频器。速度挡可在变频器内任意设定,以满足不同速度要求。
⑶运行与保护
①每套起升机构分别由一套工作制动器和一套液压安全制动器构成,工作制动器抱高速轴,安全制动器抱低速轴。其中安全制动器在起升机构总接触器合闸后立即打开,在起升机构连续没动作1h后立即抱闸。
②变频器或制动单元故障时,装置内部各输出故障的一对常开触点,以实现故障停车,并报警。
⑷起升机构设有荷重、高度综合仪综合保护装置。当吊点荷载达到额定起重量的90%时,自动发出提示性报警信号;当达到额定起重量的105%时,延时报警断电;当达到额定起重量的110%时,立即报警断电(下降仍可工作);当吊具上的荷载为零时,给出欠载预警信号;当起升机构达到极限位置时自动切断相应方向的电源并报警。起升机构设有机械式限位开关,当吊钩到达上、下极限位置时,能自动切断相应方向的电源,机构停止运行,与综合仪构成机电双重保护。
2.3小车行走机构控制系统
小车机构载荷为典型的位移性负载,由四台AWV90S-4-B1.1kW变频电机驱动,采用日本安川H1000系列变频器传动,开环控制。
⑴速度指针:
运行速度:0.2~2m/min
⑵调速方式:
由司机室联动台主令开关的挡位元来决定速度。前、后各五挡,分别为10%、30%、50%、70%、100%额定速度。系统采用主令挡位开关量输入至PLC,经软件处理后,再由PLC输出开关量信号给变频器。速度挡可在变频器内任意设定,以满足不同速度要求。
⑶运行与保护
①该机构设有两个液压电动夹轨器,小车机构只有在夹轨器打开的情况下和外部风速没超过20m/s的情况下才能运行。
②各电机均设有热超载保护。变频器或制动单元故障时,装置内部各输出故障的一对常开触点,以实现故障停车,并报警。
2.4大车行走机构控制系统
大车机构载荷为典型的位移性负载,由八台AWV132S-4-B5.5kW变频电机驱动,采用日本安川H1000系列变频器传动,开环控制。
⑴速度指针:
运行速度:2~20m/min
⑵调速方式:
由司机室联动台主令开关的挡位元来决定速度。左、右各五挡,分别为10%、30%、50%、70%、100%额定速度。系统采用主令挡位开关量输入至PLC,经软件处理后,再由PLC输出开关量信号给变频器。速度挡可在变频器内任意设定,以满足不同速度要求。
⑶运行与保护
①该机构设有两个液压电动夹轨器、一个风速仪及2套锚定装置,大车机构只有在夹轨器打开、外部风速小于20m/s以及锚定装置打开的情况下才能运行。
②各电机均设有热超载保护。变频器或制动单元故障时,装置内部各输出故障的一对常开触点,以实现故障停车,并报警。
2.5液压抓梁控制系统
液压自动挂脱梁液压系统供电及信号检测采用磁力耦合式电缆卷筒。电缆收放速度与门机起升速度同步。液压自动挂脱梁穿销、退销由安装在液压泵站中的油泵电机和电磁换向阀实现。检测信号由6个接近开关实现,分布在梁上各个部位。其中二个为对位到位信号,二个为穿销到位信号,二个为退销到位信号。
2.6照明和接地、防雷保护系统
本机设有单独的照明系统,照明系统由专门的照明变压器供电。
在接地系统方面,本机设有专门的接地线。司机室钢结构与整机本体可靠连接,保护本机上钢结构的任何一点接地电阻均不大于4。
本机还设有避雷器,可有效保护人身及门机电子设备免受雷击损害。
3电气控制系统的设计
3.1电气控制的硬件设计
S7-200系列PLC出色表现在以下几个方面:
①极高的可靠性;②极丰富的指令集;③易于掌握;④便捷的操作;⑤丰富的内置集成功能;⑥实时特性;⑦强劲的通讯能力;⑧丰富的扩展模块。
基于S7-200PLC的以上优点,本双向门机采用S7-200PLC作为控制核心,具体硬件组成如下图1所示。
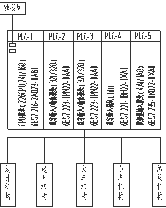
整个PLC控制系统由一块CPU226、两块数字量输入输出模块EM223、一块数字量输入模块EM221以及一块模拟量输入输出模块EM235组成。其中CPU226为中央处理器,处理由外部输入的各种信息。数字量输入输出模块用来接收外部各种故障信号、各机构的运行状态信号、联动台的输入信号以及输出各机构的控制命令,以完成各运行机构的启动、运行,制动。而模拟量模块EM235主要接收高度模拟量信图1PLC硬件组成
号、荷重模拟量信号以及风速模拟量信号。以上这些信号经由PLC模块处理后经过MPI网传输至司机室触摸屏,以便操作员及时的了解门机的整个工作状况。
3.2电气控制系统的软件设计
由于本门机采用S7-200作为控制系统的核心,因而该系统的编程采用Step7Microwin4.0编程软件。其具体的程序控制流程如下图2所示。

图2程序控制流程图
4起升机构的调试
在设定起升机构变频器的参数前,需要对起升电机进行旋转型自学习。如果电机无法与负载分离,则起升电机应进行停止型自学习。
变频器自学习通过之后在进行主从调试前,需要将两起升机构的同步刚性轴连接起来。起升机构变频器的参数见下表1。
表1起升机构变频器参数
| 参数 | 名称 | 设定值 | 备注 |
| A1-02 | 控制模式的选择 | 3 |
|
| b1-01 | 频率指令选择1 | 0/1 | 主/从 |
| b1-02 | 运行指令选择1 | 1 |
|
| b1-03 | 停止方法选择 | 0 |
|
| c1-01 | 加速时间1 | 5s |
|
| c1-02 | 减速时间1 | 3s |
|
| c1-09 | 紧急停止时间 | 3s |
|
| d1-01 | 频率指令1 | 5HZ | 主变频器 |
| d1-02 | 频率指令2 | 10HZ | 主变频器 |
| d1-03 | 频率指令3 | 20HZ | 主变频器 |
| d1-04 | 频率指令4 | 30HZ | 主变频器 |
| d1-05 | 频率指令5 | 35HZ | 主变频器 |
| d1-06 | 频率指令6 | 50HZ | 主变频器 |
| d1-07 | 频率指令7 | 75HZ | 主变频器 |
| d1-08 | 频率指令8 | 100HZ | 主变频器 |
| E1-01 | 输入电压设定 | 400V |
|
| E1-04 | 输出最高频率 | 105HZ |
|
| E1-05 | 最大电压 | 380V |
|
| E1-06 | 基本频率 | 50HZ |
|
| H1-01 | 端子S1功能选择 | 40 |
|
| H1-02 | 端子S2功能选择 | 41 |
|
| H1-03 | 端子S3功能选择 | 15 |
|
| H1-04 | 端子S4功能选择 | 14 |
|
| H1-05 | 端子S5功能选择 | F |
|
| H1-06 | 端子S6功能选择 | 3/F | 主/从 |
| H1-07 | 端子S7功能选择 | 4/F | 主/从 |
| H1-08 | 端子S8功能选择 | 5/F | 主/从 |
| H2-01 | 端子M1-M2功能选择 | 37 |
|
| H2-02 | 端子P1-PC功能选择 | 0 |
|
| H3-02 | 端子A1功能选择 | F | 主变频器 |
| H3-06 | 端子A3功能选择 | F | 主变频器 |
| H3-10 | 端子A2功能选择 | F | 主变频器 |
| H4-01 | 端子FM监视选择 | 102 | 主变频器 |
| H4-02 | 端子FM监视增益 | 100% | 主变频器 |
| H4-05 | 端子AM监视增益 | 50% | 主变频器 |
| H4-07 | 端子FM信号电平选择 | 0 | 主变频器 |
| H4-08 | 端子AM信号电平选择 | 1 | 主变频器 |
| H3-01 | 端子A1信号电平选择 | 0 | 从变频器 |
| H3-02 | 端子A1功能选择 | 0 | 从变频器 |
| H3-03 | 端子A1输入增益 | 107% | 从变频器 |
| H3-05 | 端子A3信号电平选择 | 1 | 从变频器 |
| H3-06 | 端子A3功能选择 | 13 | 从变频器 |
| H3-07 | 端子A3输入增益 | 200% | 从变频器 |
5常见故障机处理办法
本文主要针对起升机构调试时比较常见的、容易发生的一些主要故障列出了如下解决办法,见表2。
表2常见故障及解决办法
| 现象 | 解决办法 |
| 一台电机带动另外一台电机处于发电状态,两台起升电阻器发热程度不一致 | 调整H3-03参数 |
| 电机电磁噪音大 低速(3HZ一下)时的失调、震动 | 电磁噪音大时。增大C6-02的值 失调、震动时,减小C6-02的值 |
| 失调、震动 | 转矩、速度响应慢时,以0.01为单位逐渐减小C5-06的值;机械刚性较低且易发生震动时,增大C5-06的值 |
6结束语
经过长时间的研发、调试,我单位自主设计的电控系统已成功的运用在观音岩水电站2×1600KN双向尾水门机上,如图3所示。经现场测试,门机整体运行平稳,整机启动、制动冲击小,受到业主的一致好评。









 QQ交流群
QQ交流群

