

摘要:采用Freescale公司Coldfire-V0架构内核的32位处理器MCF51EM256芯片,设计了一款高性能的ARD2L智能电动机保护器,并对该保护器的硬件和软件设计方案进行详细介绍。该保护器集众多保护功能于一体,提高了电动机运行的可靠性,减少了因电动机运行故障带来的经济损失。
关键字:智能电动机保护器、MCF51EM256、ARD2L、保护时间
0引言
本文设计了一款针对电动机在运行过程中出现的起动超时、过载、欠载、短路、断相、不平衡、接地/漏电、堵转、阻塞、外部故障等情况进行保护的ARD2L智能电动机保护器(以下简称ARD2L),可有效提高电动机运行的安全性,降低生产损失,是传统热继电器的理想替代品[3]。
1硬件设计
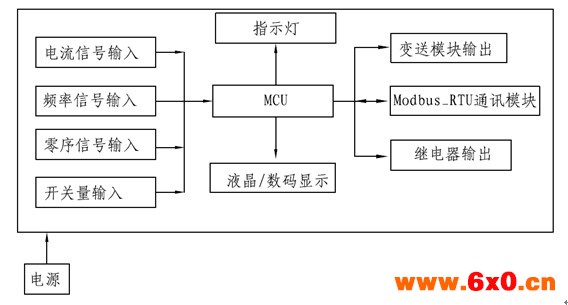
ARD2L的硬件电路包括主控芯片MCU,频率信号、电流信号、零序电流信号采集电路,开关量输入模块,继电器输出模块,变送输出模块,RS-485通讯接口,人机交互单元(状态指示灯、数码管/液晶显示),硬件电路框图如图1所示。
1.1主控芯片
MCU芯片采用freescale公司的Coldfire-V0架构内核的32位处理器MCF51EM256,时钟频率最高可达50.33MHz,内置256K的Flash、16K的RAM、4个独立16位A/D通道、3路定时器、3路SCI通讯接口以及内置RTC时钟、I2C、SPI、KBI接口等多种资源,具有极高的性价比。
1.2电源
电源是设备能否正常、稳定、可靠工作的关键部分,ARD2L采用安科瑞的通用开关电源模块。该模块输入电压为AC85V~265V,输入频率45Hz~60Hz,具有多路隔离电压输出,满足多种功能对不同供电电压的要求。其输出电压稳定、故障率小,输出纹波<1%;电源输入部分设计加入压热敏电阻、TVS管、防反接二极管等器件,对过压、过流等有一定的保护作用,同时能使产品通过严酷的EMC测试。该模块经现场实际使用,具有很高的稳定性、可靠性和抗干扰能力[4]。
1.3信号采集电路
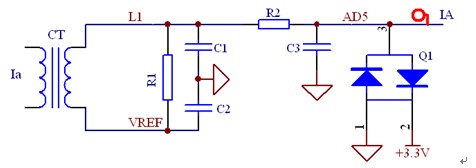
信号采集电路负责采集电流信号、频率信号和零序电流信号。其中,电流信号采用互感器隔离输入,将交流信号抬高后送入CPU进行软件差分运算,电流采样电路如图2所示。以A相6.3A规格为例,采用的电流互感器变比为100A:20mA,5P10保护型。该方案电流测量在1.2倍范围内达到0.5S精度,在8倍范围内满足5S精度,而其过载能力按8倍计算,即给互感器加上50.4A电流,通过取样电阻R1的电流为10.08mA,两端电压为0.886V。同时,给采样信号抬高电压UREF=1.2V,使交流信号的幅值大于零,便于A/D采样;在电路的输出端加入限压二极管,使输入电压限制在3.3V以下,能对A/D采样通道起到很好的保护作用。
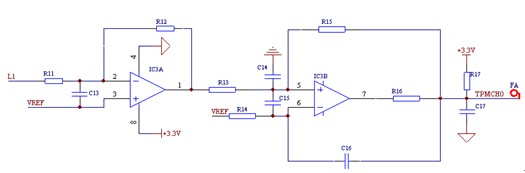
频率采样电路如图3所示。该电路采用MCP6002双运放进行两级放大,初级放大倍数较小,且在初级与次级之间进行滤波处理,次级运放将交流信号整形为方波信号,通过边沿触发方式捕捉,然后在CPU内部计算测量率。
1.4人机交互界面
人机交互界面的显示采用数码管或液晶两,用户可以根据实际需要选择显示方式,输入采用按键方式。其中,数码管显示采用动态扫描方式,其驱动电路采用74HC595和三极管构成;液晶显示采用拓普威公司LM12832BCW的128点阵中文液晶,其数据传输采用SPI串口,可极大地节省CPU资源。同时,LED和LCD显示采用同一个SPI接口控制,使得两种显示方式可以通用。
1.5控制模块
控制模块主要由开关量输入、输出组成,如图4所示。其中,开关量输入用于监测断路器、接触器的开关状态和采集现场的工业联锁状态,也可根据客户要求用于电动机的起停控制;开关量输出主要用于输出脱扣信号、报警信号和远程起/停信号。
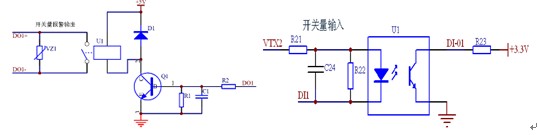
图4 开关量输入输出电路
1.6 通讯/变送模块
通讯模块采用RS-485模块Modbus RTU通讯规约,能实现遥测、遥控、遥信等功能。而变送是将我们需要的电流信号转换为DC 4~20mA模拟量输出,方便与PLC、PC等控制机组成网络系统,实现电动机运行的远程监控。
2 软件设计
ARD2L的软件设计主要采用嵌入式C语言,其中保护器软件设计包括每次上电系统配置的初始化,按键寄存器复位,判断显示单元是数码还是液晶,继电器置位初始状态,A/D采样初始化以及电参量的计算与保护等。软件的主函数如下:
void main(void)
{
DisableInterrupts;
MCU_initi(); //CPU初始化
if(_RES==0) //判断是数码管或液晶显示
led_or_lcd=0;
else
{
led_or_lcd=1;
PTBDD_PTBDD2=1;
PTDDD_PTDDD4=1;
lcd_init2();
}
recover_FIRSTFLAG(); //恢复内存校表数据
if(FIRSTFLAG!=0x1234){init_flash();}
else recover_byte();
initi_uart2();
relay_all_initi(); //继电器至位初始状态
EnableInterrupts //启动中断
Vref_init();
sampling_init(); //AD采样初始化
for(;;)
{
__RESET_WATCHDOG();
if(over_flag==1) //计算及保护
{
over_flag=0;
measure_ABC();
protect();
sent(); // 变送输出
}
measure_frequency_a(); // 测频
rtc_time_deal();
warning_deal();
trouble_deal();
program1(); // 继电器可编程处理
event_deal();
getkey();
DI_read();
reset(); // 复位
lamp_deal();
stat(); // 统计总运行时间、停车时间
display(); // 测量数据和保护事件显示
}
}
ARD2L的软件流程主要包括A/D信号采集程序、TPM测频程序、电参量计算程序、保护处理程序、各种通讯协议处理程序等,部分程序流程如图5。
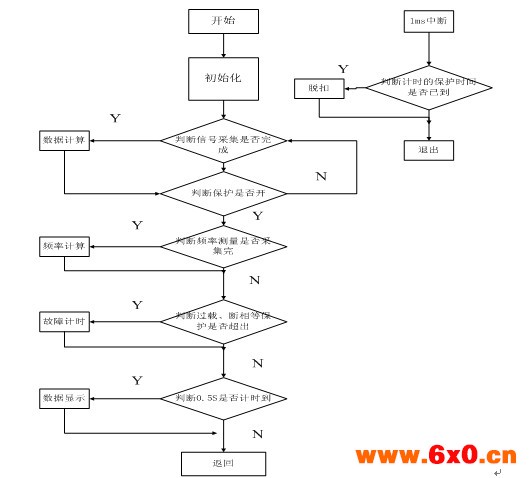
图5主程序流程图(部分)
3测试结果与精度验证
3.1电流准确度测试结果
电流准确度测试源采用南京丹迪克的DK-34B1交流采样变送器,其中对基波的测试是通过加40%畸变率的3次谐波进行的。表1测试了6.3A规格的ARD2L智能电动机保护器三相电流的有效值与基波值,由表中数据可看出,ARD2L智能电动机保护器在10%~120%Ie测量范围内的精度满足0.5级,Ie为电机额定功率[5]。表1ARD2L智能电机保护器三相电流测试结果
| 指标 | 标准值 | 6.3A规格 | |||||
| A相 | B相 | C相 | |||||
| 有效值 | 基波 | 有效值 | 基波 | 有效值 | 基波 | ||
| 电流 | 0.63 | 0.62 | 0.59 | 0.64 | 0.59 | 0.62 | 0.58 |
| 6.3 | 6.29 | 5.91 | 6.31 | 5.92 | 6.29 | 5.89 | |
| 7.56 | 7.54 | 7.05 | 7.55 | 7.06 | 7.54 | 7.03 | |
3.2保护时间测试结果
ARD2L智能电机保护器具备起动超时、过载、欠载、短路、断相、不平衡、接地/漏电、堵转、阻塞、外部故障等保护功能,根据JB/T10736-2007标准进行了保护时间测试,见表2。
表2ARD2L保护时间测试结果
起动超时:
| 脱扣延时(S) | 0.1 | 10.0 | 999.9 |
| 第一次 | 0.110 | 9.950 | 993.882 |
| 第二次 | 0.117 | 9.965 | 993.859 |
| 第三次 | 0.119 | 9.961 | 993.872 |
阻塞保护:脱扣域值(250%)
| 脱扣延时(S) | 0.1 | 5.0 | 600.0 |
| 第一次 | 0.122 | 5.031 | 596.455 |
| 第二次 | 0.128 | 5.037 | 596.458 |
| 第三次 | 0.134 | 5.043 | 596.431 |
欠载保护:脱扣域值(50%)
| 脱扣延时(S) | 0.1 | 5.0 | 600.0 |
| 第一次 | 0.130 | 5.012 | 596.401 |
| 第二次 | 0.134 | 4.996 | 5.96.393 |
| 第三次 | 0.129 | 5.015 | 596.349 |
不平衡保护:脱扣域值(30%)
| 脱扣延时(S) | 0.1 | 5.0 | 600.0 |
| 第一次 | 0.126 | 5.003 | 596.400 |
| 第二次 | 0.131 | 5.009 | 596.362 |
| 第三次 | 0.121 | 5.007 | 596.354 |
接地/漏电保护:脱扣域值(80%或30mA)
| 脱扣延时(S) | 0.1 | 0.5 | 600.0 |
| 第一次 | 0.117 | 0.519 | 596.444 |
| 第二次 | 0.124 | 0.528 | 596.432 |
| 第三次 | 0.135 | 0.517 | 596.416 |
短路保护:脱扣域值(500%)
| 脱扣延时(S) | 0.1 | 10.0 | 600.0 |
| 第一次 | 0.135 | 9.973 | 596.564 |
| 第二次 | 0.133 | 9.969 | 596.472 |
| 第三次 | 0.136 | 9.967 | 596.526 |
断相保护:
| 脱扣延时(S) | 0.1 | 1.0 | 600.0 |
| 第一次 | 0.124 | 1.036 | 596.456 |
| 第二次 | 0.138 | 1.033 | 596.382 |
| 第三次 | 0.132 | 1.035 | 596.179 |
外部故障:
| 脱扣延时(S) | 0.1 | 5.0 | 600.0 |
| 第一次 | 0.126 | 4.976 | 595.711 |
| 第二次 | 0.112 | 4.989 | 595.801 |
| 第三次 | 0.124 | 4.988 | 595.836 |
由表2可知,该保护器满足脱扣延时保护时间误差为±10%或100mS的精度要求[6]。
4典型应用
采用直接起动模式的ARD2L智能电动机保护器接线如图6所示。其中,电机的起停是通过现场按钮来控制的(保护器本身不控制电机起停),接触器KM的吸引线圈串进脱扣继电器的常闭触点。通电后,按下起动按钮SF时,KM吸引线圈得电,使KM主触头闭合,电动机开始工作;按下停车按钮SS时,KM吸引线圈失电,使KM主触点释放,电机停止工作。远程起动必须要由上位机来控制,保护器本身不控制。
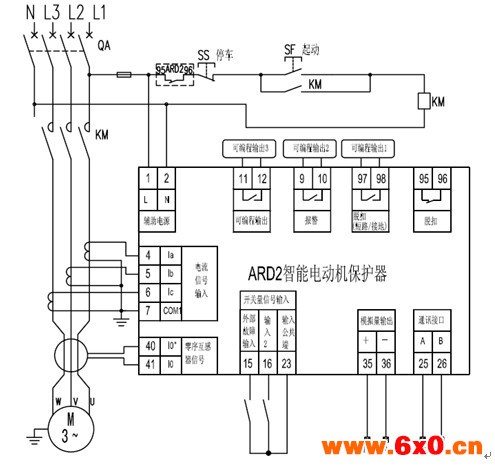
图6 ARD2L电机保护器直接起动模式接线图
5结束语
本文采用EM256设计了性能、多功能的ARD2L智能电机保护器,并对其电源、信号采集、输入输出控制等硬件电路进行了详细介绍,通过软件主函数和流程图分析了保护器运行过程。电流准确度与保护时间的测试结果表明,该保护器具有优异的测量与保护功能。
文章来源:《电工技术》2014年第3期
参考文献:
[1]马新军,电机保护器设计,硕士学位论文,东北大学,2005.
[2]丁金磊,基于ARM的电动机综合保护器装置设计,硕士学位论文,2008.
[3]安科瑞电气股份有限公司,ARD2智能电动机保护器选型手册,2013.
[4]任志程,周中,电力电测数字仪表原理与应用指南,中国电力出版社,2007.
[5]ARD3系列智能电动机保护器,上海市企业标准,Q/TDEI27-2011
[6]JB/T10736-2007低压电动机保护器.








 QQ交流群
QQ交流群

