

摘要:小区智能汽车的导航和定位问题是机器人能够按照预期目标完成预期功能的前提,该部分也是程序设计的核心关键部分。本文主要研究了小区智能汽车导航与定位的几种方法。
关键词:小区智能汽车;导航;定位
0.引言
导航与定位系统是智能汽车领域中的关键技术之一,导航与定位系统的优劣对智能汽车性能有着重大影响。尽管国内外许多科研机构对无人驾驶汽车做过深入的研究,但迄今为止没有一部汽车可以完全达到与有人驾驶车辆等同的性能。其中一部分原因就是因为无人驾驶汽车导航与定位系统还没有达到相应的要求。因此对无人驾驶汽车导航与定位系统作深入研究不仅具有理论意义,也具有实际意义。
1.导航方式分类
小区智能汽车有多种导航方式,根据环境信息的完整程度、导航指示信号类型等因素的不同可以分为三大类:基于地图的导航、基于创建地图的导航、无地图的导航。
基于地图的导航是完全依靠在小区智能汽车内部保存的由用户创建的关于环境的几何模型或拓扑地图等完整信息,并在预先规划出的一条全局路线的基础上,采用路径跟踪和避障技术,实现机器人导航,如图1所示。
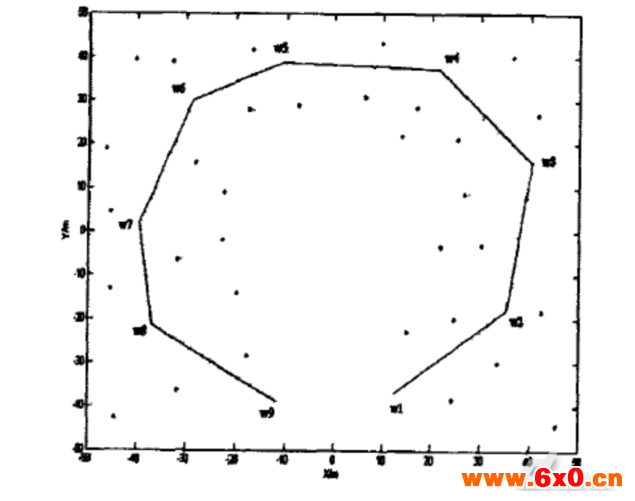
图1小区智能汽车导航地图
基于创建地图的导航是利用传感器(如里程仪、声纳、激光测距仪、视觉传感器等)来创建关于当前环境的几何或拓扑模型地图(如图2),然后利用这些模型来实现导航。
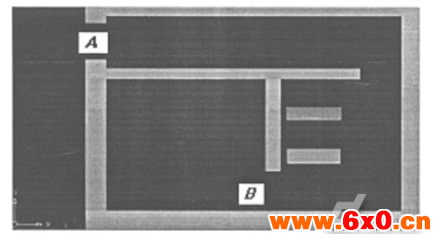
图2小区智能汽车地图模型
无地图的导航是在环境信息完全未知的情况下,可通过摄像机或其他传感器(如超声,激光测距传感器)对周围环境进行探测,利用对探测的物体进行识别或跟踪来实现小区智能汽车导航。
当小区智能汽车对周围环境并不完全了解时,则可采用基于路标的导航策略,也就是将环境中具有明显特征的景物存储在小区智能汽车内部,小区智能汽车通过对路标的探测来确定自己的位置,并将全局路线分解成各个路标之间的片段,再通过一连串的路标探测和路标制导来完成导航任务。实际上在相对规整的环境中,还可以在路面或路边画出一条明显的路径标志线,小区智能汽车在行走的时候中利用传感器不断的对标志线进行探测并调整标志线与行进路线的偏差,当遇到障碍时或是停下等待或是绕开障碍,避障后再根据标志线的指引回到原来的路线上去,最终在标志线的指引下到达指定的目的地。
由于小区智能汽车的工作区域和路径是固定的,以上各种导航方式中,基于地图的导航对小区智能汽车来说是最合适的。小区智能汽车的工作区域确定后,创建完整的几何地图模型存储在控制系统的存储器中,根据地图实现导航;当小区智能汽车遇到障碍物时,利用自动避障功能绕过障碍物或等待障碍物离开,然后再回到原来的路径上。
2.定位方式分类
依所采用的传感器,小区智能汽车的定位技术可分为绝对定位技术和相对定位技术两类。相对定位技术主要有测距法和惯性导航法。绝对定位技术中比较成熟的有GPS(globalpositioningsystem,全球定位系统)、场景识别定位和基站定位。下面是对小区智能汽车可以参考的几种定位技术的分析:
基站定位(CellID定位):小区智能汽车通过接收附近的建筑物识别码(CellID),并将该信息翻译成经纬度坐标来确定自身位置。缺点:需要在建筑物上安装无线网络发射终端,费用较高。
GPS定位:通过全球定位系统对非固定路面系统中的控制对象进行跟踪和制导。优点:适合室外远距离的跟踪和制导。缺点:精度取决于GPS的精度及控制对象周围环境等因素;民用GPS的定位精度为10米左右,不能满足小区智能汽车使用的要求。
场景识别定位:通过CCD摄像机生成小区智能汽车周围场景的图像,与计算机系统中存储的环境地图进行特征匹配,从而可以确定出小区智能汽车的当前位置。优点:不要求人为设置任何物理路径,因而柔性较高;随着计算机图像采集、储存和处理技术的飞速发展,该方法的实用性越来越强,可以通过采用高速处理器弥补实时性差的缺点。
小区智能汽车的这几种定位方式各有优缺点,根据不同的功能要求和工作环境可以选择不同的定位方式。单独使用GPS进行定位,在确定基准线方面存在一定的误差;机器视觉进行此类作业,可以实时提取出当前所处环境的特征信息,提高了定位的精度,但是单独使用场景识别定位时,图像处理算法复杂且定位难度大,因此考虑将GPS和场景识别定位两种定位方式结合起来进行定位。先用GPS定位系统将小区智能汽车的位置缩小至10米范围内,然后利用机器视觉技术寻找当前环境的特征点,与系统内部存储的环境地图进行匹配,从而确定当前小区智能汽车的准确位置。
3.机器视觉技术及机器视觉定位
人类感知外部世界主要是通过视觉、触觉、听觉和嗅觉等感觉器官,其中约80%的信息是由视觉获取的。因此,视觉在整个信息获取系统中占有非常重要的地位。机器视觉系统就是模拟人类视觉的功能来获取、处理信息的一种智能系统。机器视觉系统结构图如图3所示。
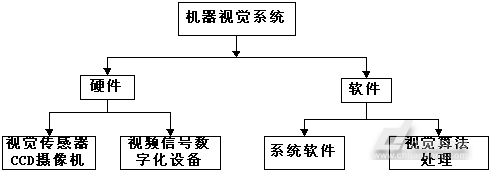
图3机器视觉系统
机器视觉可以看作从三维环境的图像中抽取、描述和解释信息的过程,它可以划分为以下几个主要部分:图像的采集、二值量化、存储、变换、编码、分割、特征提取、图像数据库的建立、图像的分类和表示、图像识别、模型匹配、内性解释和理解等等。再根据实现上述各种过程所涉及的方法及技术的复杂性将他们归类,可分为三个处理层次:底层视觉处理、中层视觉处理和高层视觉处理。虽然各层次之间没有明确的界限,但是这种划分对于机器人视觉系统的固有处理过程加以分类提供了一种有用的结构。基于视觉的机器人导航、定位的实现需要给机器人装备视觉系统。
机器人视觉系统的一般工作原理为:安装在小区智能汽车上的CCD摄像头实时采集前方路面的图像信息,将当前道路的反射光强信号转化为相应的模拟电信号输送到视频采集卡,视频采集卡中的模数转换器通过对模拟信号采样和量化,将模拟信号进一步转化为控制器可以接受和理解的数字信号,控制器运用对应的算法处理道路图像,识别出道路中的道路信息和障碍物信息,自主决定小区智能汽车当前的前进方式(换道、转向)和控制车辆自身的运动状态。
在基于场景识别的定位中,通过CCD摄像机生成小区智能汽车周围场景的图像,与计算机系统中存储的环境地图进行特征匹配。由于整体模板匹配或特征抽取计算量太大,在图像处理阶段一般先提取边界,在图像分割的基础上作进一步描述、理解。根据图像全局特性对目标进行哈夫(Hough)变换,可以从图像中提取边界特征,基本原理是根据对偶,由图像空间的点计算参数空间的线,再由参数空间的线交点计算图像空间的线,可用来检测各种能以解析式f(x,c)=0(x为图像点坐标向量,c为参数向量)表示的曲线或轮廓目标。
结构化条件下机器视觉导航比较有代表性的工作有学者AkioKosaka和AviKak研究的基于概率推理定位法。该定位法预先建立环境场景的线框模型,以高斯分布描述机器人姿态向量(位置和朝向),机器人运动过程中姿态的更新表现为姿态向量分布数学期望和方差的更新,基本原理如图4所示,算法主要步骤为:
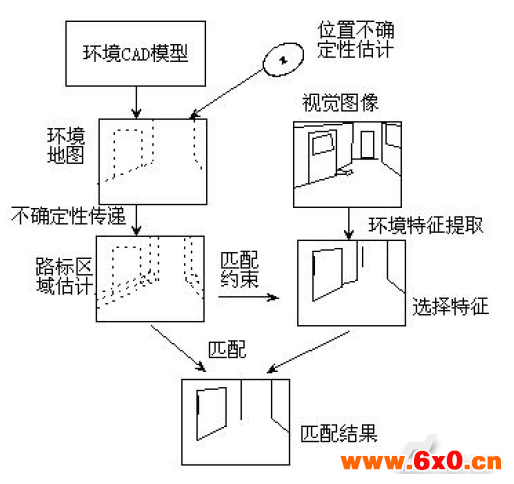
图4基于环境模型和概率推理的自定位算法
Step1:以高斯分布函数描述机器人位置p=(x,y,φ),执行运动命令后位置为p′=h(P),确定每个定位点的均值P和不确定性参数变换方差矩阵Σp;
Step2:确定执行运动指令后,机器人的位置参数及位置不确定分布矩阵。位置不确定性指运动中滑动或不确定性因素引起机器人的额外平移或旋转距离。
Step3:基于场景模型的卡尔曼滤波更新当前位置。
由于工作环境的复杂性、自身状态的不确定性和单一传感器只能获得环境特征的部分信息段的局限性,仅仅依靠一种传感器难以完成对外部环境的感知。为完成在复杂、动态及不确定性环境下的自主性,机器人通常装有用于导航需要的多种传感器,如何有效的利用多传感器提供的信息,并应用到导航决策中,这就需要用到信息融合技术。
4.小区智能汽车导航定位系统的设计
小区智能汽车导航定位系统主要包括两个部分,GPS部分和机器视觉部分,如图5所示。其中,GPS部分主要是提供小区智能汽车的绝对位置坐标、航向角度和行驶速度;机器视觉部分是将采集到的图像经过图像预处理,得到导航路
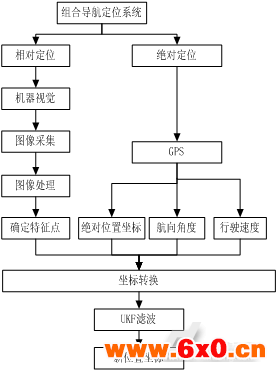
图5组合导航定位系统整体设计
径中已知点的相对位置坐标。在两部分处理完成之后,将两组信息统一到同一坐标系下,并进行UKF(unscentedkalmanfilter)滤波,得到新的位置信息。
5.导航算法几何模型
组合导航系统确定小区智能汽车的位置后,与系统中存储的地图进行匹配,计算当前小区智能汽车的位置是否在存储地图中的路径上,如果不在规划好的路径上,则寻找距离当前小区智能汽车最近的地图上的点,作为目标点如图6(a)所示;如果在事先规划好的路径上,则根据地图前往下一个目标点如图6(b)。在导航系统中创建两个坐标系,一个是以摄像机为原点的视觉坐标系,另一个是世界坐标系(控制系统内部存储的地图坐标)。视觉坐标系的原点为摄像机光心在地面上的投影点,其中X轴的正方向为行驶方向的负方向,Y轴的正方向垂直于X轴,水平向右。图7中的目标点即为下一步清扫机器人要达到的位置,小区智能汽车的位置确定后,可以将世界坐标系中的点转换到以小区智能汽车为主的
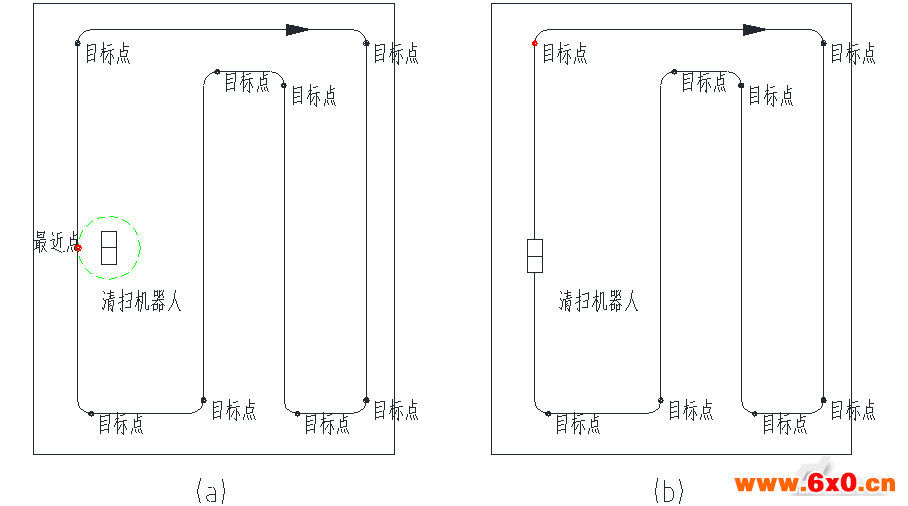
图6确定目标点示意图

图7导航系统坐标系图
视觉坐标系下,其在视觉坐标系中的坐标定义为 。摄像机在大地坐标系中的位置是由定位系统实时获得的,其在世界坐标系中的坐标为(
。摄像机在大地坐标系中的位置是由定位系统实时获得的,其在世界坐标系中的坐标为( ),目标点在世界坐标系中的坐标为。目标点在视觉坐标中的坐标公式(1)得到:
),目标点在世界坐标系中的坐标为。目标点在视觉坐标中的坐标公式(1)得到:

式中 为导航车的航向角度。矢量的方向即为小区智能汽车的运动方向。
为导航车的航向角度。矢量的方向即为小区智能汽车的运动方向。
6.结束语
目前无人驾驶汽车导航与定位系统的设计方法多种多样,但没有一种方法是全能的。针对不同的控制对象和工况都对导航与定位系统提出了不同的要求,而小区道路这一特殊环境正是对无人驾驶汽车导航与定位系统提出了新的要求,其研究成果对无人驾驶汽车的进一步研究及实用化是有积极意义的。
参考文献:
[1]张鹏飞,何克忠,欧阳正柱等.多功能室外智能移动机器人实验平台——THMR-V[J].机器人,2002,24(2):97—101.
[2]梁喜凤.室内地面清洁机器人路径规划[J].中国计量学院学报,2006,17(1):64-68.
[3]邹元杰,刘小梅.智能车辆定位导航系统的研究[J].湖南农机,2010,37(5).
[4]张超.智能车辆定位导航系统的定位研究[D].成都:电子科技大学硕士论文,2005.
[5]魏彩彩.智能车辆定位与导航系统车载装置研究[J]电源技术应用,2013,(8).








 QQ交流群
QQ交流群

