

摘要:通过对移动机器人的研究,本文采用单片机实现对轮式移动机器人电机驱动和闭环调速的控制,实现了基于渡越时间法的超声波测距模块设计,为机器人提供简单方便的障碍物距离检测。经过实验仿真验证,论文设计的移动机器人运行平稳,控制简单。仿真的路径跟踪结果显示路径跟踪控制规则能够使机器人较好的跟踪已知路径。
关键词:单片机,移动机器人;运动控制系统;轨迹跟踪;
中途分类号:TP9文献标识码:B
0引言
随着移动机器人技术的迅速发展及其在工业、军事等领域中的广泛应用,有关移动机器人的理论、设计、制造和应用的新的技术科学---机器人学,已逐渐形成,并越来越引起人们广泛的关注。移动机器人的研究将进入了一个崭新的阶段。同时,太空资源、海洋资源的开发与利用为移动机器人的发展提供了广阔的空间。目前,智能移动机器人,无人自主车等领域的研究进入了应用的阶段,随着研究的深入,对移动机器人的自主导航能力,动态避障策略,避障时间等方面提出了更高的要求。地面智能机器人路径规划,是行驶在复杂,动态自然环境中的全自主机器人系统的重要环节,而地面智能机器人全地域全自主技术的研究,是当今国内外学术界面临的挑战性问题。
智能移动机器人是一类能够通过传感器感知环境和自身状态,实现在有障碍物的环境中面向目标自主运动,从而完成一定功能的机器人系统。移动机器人技术研究综合了路径规划、导航定位、路径跟踪与运动控制等技术。涉及到包括距离探测、视频采集、温湿度以及声光等多种外部传感器,作为移动机器人的输入信息。移动机器人的运动控制主要是完成移动机器人的运动平台,提供一种移动机器人的控制方式。性能良好的移动机器人运动控制系统是移动机器人运行的基础,能够服务于移动机器人研究的通用开发平台。
运动控制器是移动机器人的执行机构,对机器人的平稳运行起着重要作用。随着新的智能控制算法的不断涌现,移动机器人正向着智能化方向发展,这就对运动控制系统性能提出了更高的要求。设计实现智能移动机器人的控制系统,能够熟悉移动机器人硬件和软件的开发,掌握移动机器人的运动控制特性,为后续的移动机器人的功能扩展搭建一个可行、稳定的平台,而这个平台则可以作为多种机器人开发的公共基础平台。实现智能移动机器人控制系统的开发具有一定的现实意义,将为以后的移动机器人开发奠定坚实的基础。
1控制系统结构功能
移动机器人运动控制系统是整个移动机器人的基础,.可靠的运动控制系统是移动机器人实验设计的前提。设计智能移动机器人控制系统框图如图1所示。
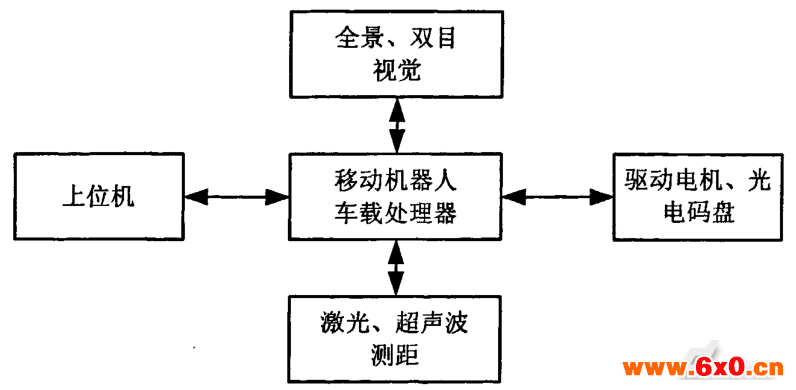
图1移动机器人控制系统框图
开发人员在上位机进行移动机器人的软件开发,同时上位机也是整个移动机器人的控制中枢,上位机接收各信息采集模块提供的环境信息,给出移动机器人控制指令控制机器人移动。机器人本体上安装有四个驱动电机,作为移动机器人的驱动机构。每个驱动电机都带有一个光电码盘,光电码盘提供正交编码脉冲信号,可用作驱动电机闭环调速和机器人定位脉冲。车载处理器主要负责超声波测距模块控制、模块管理、机器人定位以及和上位机的通信,可以采用通用计算机、大容量单片机、DSP、ARM等嵌入式控制器。
如果采用通用计算机,那么开发上位机就不用独立于车载处理器之外了。移动机器人输入信息包括视觉输入和距离检测。视觉信息包括全景视觉和双目视觉摄像机。距离信息包括激光测距和超声波测距模块。移动机器人根据开发人员事先建立好的环境地图,移动过程中读取的环境信息,在处理器内根据控制规则进行运算,输出控制信息到驱动电机,控制机器人的移动。
移动机器人的车载处理器和上位机作为处理中枢,接收激光、超声波等测距模块提供的障碍物距离信息,全景、双目视觉提供的视觉信息。结合上位机中的预设功能,通过控制驱动电机控制机器人完成相应动作。
2控制系统硬件结构
控制系统硬件主要包含主控板硬件、电机驱动以及超声波测距模块。
(1)主控板硬件:主控板是移动机器人的硬件控制中心,主要负责各模块管理协调和数据通信任务,主控芯片采用TI公司2000控制型DSP。主控板主要负责与上位机的通信,电机驱动的控制信息可以由上位机经过主控板传输到电机驱动控制器。同时主控板检测电机码盘提供的正交编码脉冲信号用作机器人的定位。距离检测模块接口主要由主控板负责。超声波测距模块由主控板进行管理,发射信号的产生,接收信号的检测处理和超声波运行时间的读取都由主控板控制完成。如果激光测距传感器和双目相机的接口为RS232串口,那么主控板也可以作为这类距离传感器的接口芯片,减少上位机的接口负荷,优化系统结构。
(2)电机驱动模块:移动机器人有四个定向轮,分别由四个完全相同的驱动电机驱动。为保证驱动电机闭环调速的实时、准确性和运行的稳定、独立性,每个驱动电机将由各自电机驱动控制器单独驱动。每个电机驱动模块由一个带有通信接口的控制器和电机驱动单元组成。电机驱动模块控制芯片接收控制指令,计算出驱动电机运行速度和方向,给出驱动电机控制电压,同时通过驱动电机同轴光电码盘检测电机运行速度,对驱动电机目标速度和实际速度差值进行一定运算,给出驱动电机控制电压值,完成驱动电机的闭环调速。
(3)超声波测距模块:超声波是一种在弹性介质中的机械振荡,传播速度仅为光波的百万分之一,纵向分辨率较高。超声波对色彩、光照度、外界光线和电磁场不敏感,因此超声波测距对于被测物处于黑暗、有灰尘或烟雾、强电磁干扰、有毒等恶劣的环境下有一定的适应能力,在液位测量、机器人避障和定位、倒车雷达、物体识别等方面有广泛应用。由于超声波传播不易受干扰,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量。超声波测距模块为移动机器人提供障碍物距离信息。使用渡越时间法测量距离。控制器产生方波信号,经过功率放大到超声波换能器输出,输出超声波在空气中以声速传播,经障碍物反射回来,由接收超声波换能器接收。由于超声波信号在空气中衰减,接收换能器输出的电信号极其微弱,大都为毫伏级,并且会掺杂一些噪声干扰,所以需要对接收信号进行放大和滤波。调理过的信号再通过检波和整形即可被控制芯片使用。从控制芯片发射超声波信号开始到接收检测到整形后的信号即为超声波的传输时间,从而计算出障碍物距离。
主控板硬件主要内容为主控芯片TMS320LF2407A及其外围电路,外围电路包括复位电路、时钟、电源模块、JTAG接口、锁相环外接滤波模块、SRAM、模块I/O接口、串口传输模块以及电平转换芯片等。主控板主要负责各模块接口管理和通信任务,同时主控芯片完成超声波测距的设计控制和机器人定位。另外设计中主控板还可嵌入相关开发系统,利于后续设计的开发和升级。主控板硬件结构图如图2所示。
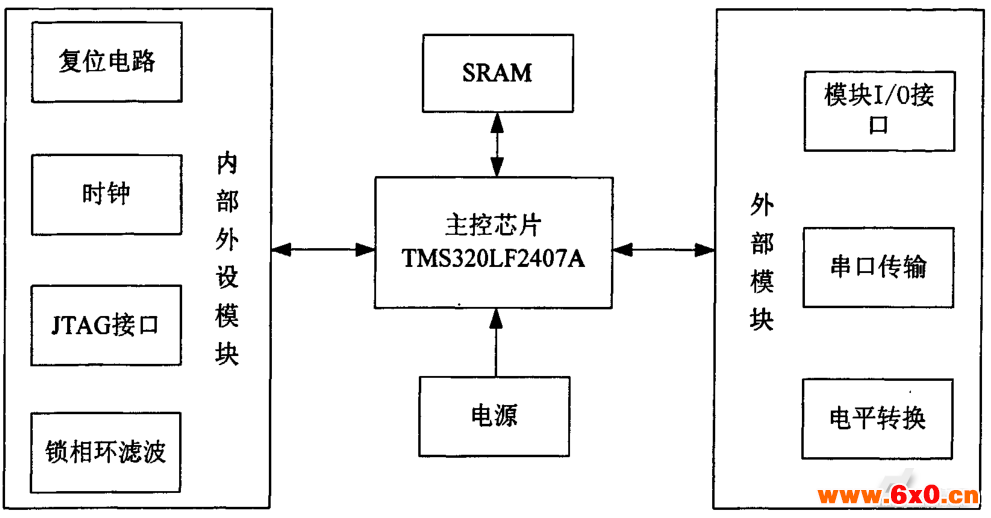
图2主控板硬件结构图
3仿真模型
本文设计了一个基于Simulink7的智能小车仿真平台,能够根据系统性能要求确定PID控制器的最优参数,并且利用虚拟现实技术实时反映智能小车运行过程中的状态,可以为电子设计中掌握小车运动控制提供很好的演示环境
假设车在XOY坐标系的坐标为(X,Y),运行方向与X轴的夹角为θ,则向量[X,Y,θ]表示车的位姿,小车运动方程如下:
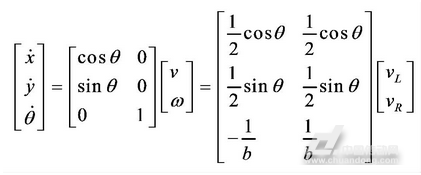
式中,b为左右驱动轮间横向距离,vL为左轮线速度,vR为右轮线速度,ω为小车转向速度,v为小车前进速度左右驱动轮选用同一型号电机,车轮摩擦转矩Tf为反抗性恒转矩负载。若i为减速比,η为传动机构效率,则负载转矩折算到电机轴上的等效转矩
T=Tf/iη
采用虚拟仿真技术使得对智能车的测控更加直观,Simulink优化设计模块使系统控制器参数的调节更为方便,两者结合实现了可视化交互性操作,能实时观测智能车运动状态的变化。
4控制器参数优化
本设计采用PID控制,通过调节KP、KI和KD三个控制参数,使智能车能更准确、快速地沿给定路径前进。图3中SimulinkDesignOptimization模块集中的SimulinkConstraint模块是Simulink7.0版本更新的优化设计模块,其集成了基于图形界面的系统控制器优化设计和仿真功能,能够根据设定的性能指标约束对控制器参数进行优化计算。PID控制器输出经过一个驱动器后去控制被控对象,考虑电机工作电压的上、下限,驱动器近似为一个饱和非线性环节,即图一中的Saturation模块。
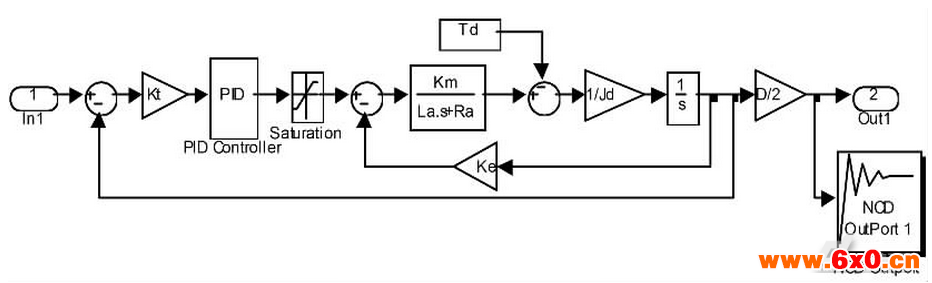
图3驱动电机的PI控制模型
5结论
本设计实现了基于STCl2C4052AD的电机驱动模块,独立完成移动机器人驱动电机的闭环调速。由上位控制器发送指令控制机器人运动,无需参与闭环调速过程。使用MATLAB模糊工具箱实现了一种机器人的路径跟踪程序控制,输入通过机器人光电码盘记录的机器人左右轮位移,转换为机器人的当前位置和姿态,经过路径跟踪控制规则运算并量化输出控制机器人的线速度和角速度(转换为机器人的左右轮速度),实现对离散化路径的跟踪。








 QQ交流群
QQ交流群

