

在不需要连续观测的应用中,平均功耗与噪声的关系变得更有意义。或许令人难以置信,但噪声和功耗的关系甚至可能变成互补式。这对工程师来说无疑是个好消息。因为在之前的设计中,工程师可能因难以确定该让功耗还是性能主导其设计而延误了时机。而现在,无需等待其他人在这一权衡中做出决定,智能传感器架构师可自行对权衡范围内的相关选项进行量化;这一做法将重新定义架构师的工作。
组成智能传感器架构的5个部分,你都造吗?图1是智能传感器架构的一般例子,其中包含了最常见的功能。
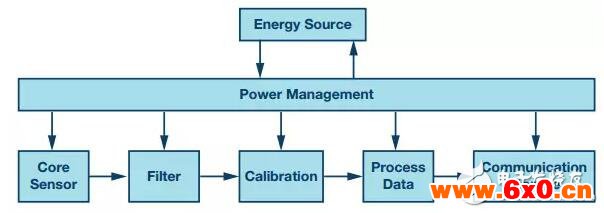
核心传感器
智能传感器节点中的信号链从核心传感器功能开始。最基本形式的核心传感器也称为变换器,其将物理条件或属性转换成代表性的电信号。传感器的比例因子描述其电响应与其监控的物理属性或条件的线性关系。
滤波器
滤波器的作用是降低核心传感器可能支持,但与应用无关的频段中的噪声。在振动监控应用中,这可能是一个带通滤波器,它将随机振动与可能指示机器寿命减损的特定频谱特征分离开来。在倾斜传感器中,这可能是一个简单的低通滤波器,例如移动平均滤波器。这种情况下,时长是建立时间与滤波器输出残余噪声之间的一个重要权衡因素。图2显示了ADXL355艾伦方差曲线的例子,它表示相对于产生测量的均值时间,测量的不确定性(噪声)。
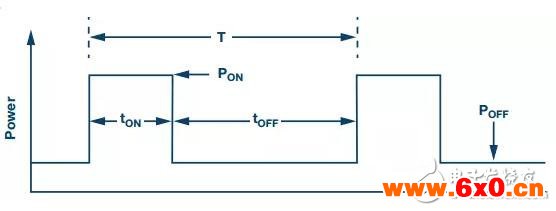
图2.艾伦方差曲线:ADXL355和ADXL362
校准
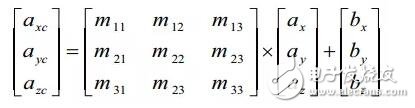
校准功能的作用是通过应用校正公式来提高测量精度。在要求极高的应用中,通常是在严格受控条件下进行测量,通过直接观测传感器响应来获得此类校正公式。例如在倾斜传感器应用中,校准过程涉及到观测MEMS加速度计在多个不同方向上相对于重力的输出。这种观测的一般目标是观测传感器对足够多取向的响应,从而求解如下关系式(参见方程1)中所有12个校正系数(m11、m12、m13、m21、m22、m23、m31、m32、m33、bx、by、bz):
数据处理
数据处理功能用于将校准且滤波的传感器数据转换成适当的测量结果以对应用提供最佳支持。在振动监控系统中,这可能是简单的RMS-DC转换或带频谱报警的快速傅里叶变换(FFT)。在倾斜检测应用中,智能传感器会利用如下将传感器对重力的加速度响应转换成方位角估计值。
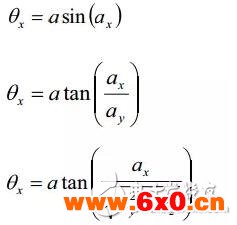
这三个关系式分别代表使用一个、两个和三个加速度计测量结果的倾斜估计,假设各加速度计完全正交。
通信/存储
通信/存储功能支持所有物联网云服务的数据分级和连接(加密/安全、存储和分析)。
周期供电操作,你必须知道的那点事儿电源管理(PM)功能对典型智能传感器有三个作用——
1)管理信号链中所有器件的上电时序要求。
2)将电源供应转换成适当的电压来支持信号链中所有器件的最优运行。
3)在以一定时间间隔进行测量的系统中,提供排程信号来触发每次测量事件。
周期供电是识别智能传感器节点中此类断续操作的常见方法。在两次测量事件之间,智能传感器处于低功耗(或零功耗)状态,这种技术有助于节能。图3显示了一个采用此技术的智能传感器在一个完整测量周期上的瞬时功耗。
图3:基本供电周期图
下方程提供了一个利用图3所示运行特性来估算平均功耗(PAV)的简单关系式。
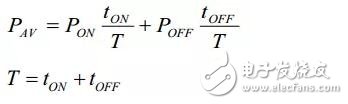
PON是智能传感器节点执行采样并处理数据以产生和传输相关测量结果的平均功耗。
POFF是智能传感器节点支持低功耗睡眠模式所需的平均功耗。
tON是智能传感器开启、产生测量结果、将该结果传输到物联网云、然后关闭所需的时间。
tOFF是智能传感器处于静止状态(睡眠模式或完全关断)的时间。
T为平均测量周期时间。
测量过程必须得清清楚楚哒
在其开启时间(tON)内,智能传感器通常会经历多个不同运行状态。图4和下方公式显示了一个示例序列,其将开启时间分为四段:初始化、建立、处理和通信。
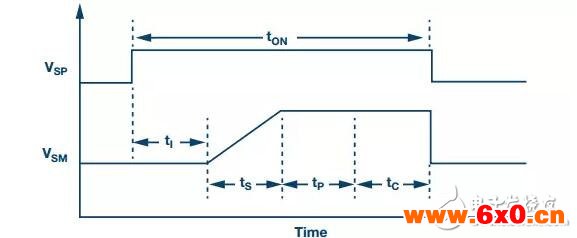
图4:智能传感器测量周期序列
TI是初始化时间,代表从施加电源(VSP)到信号链中的各器件准备好支持数据采样和处理的时间。
tS是建立时间,代表从第一个数据样本到滤波器输出(VSM)建立于足够高的精度水平的时间。
tP是处理时间,代表从滤波器建立到产生测量结果所需的时间。这可能包括应用校准公式、专门的信号处理以及根据物联网安全协议进行数据加密的时间。
tC是通信时间,代表连接云服务、发送加密数据以及支持差错校验或身份验证服务所需的时间。
如何降低建立时间影响,followme~根据测量周期的阶段划分(图4),很明显,在滤波器建立时间这一段中,噪声可能会影响周期供电的智能传感器节点的功耗。一般而言,来自均值操作的噪声幅度的降低量与均值时间的平方根成比例,而能耗的增加量与均值时间是直接比例关系。因此,噪声幅度降低10倍会引起能耗(滤波建立期间)增加100倍!这种不成比例的权衡关系很快会对只需最少滤波(最低噪声)的传感器有利。
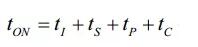
图5:微波天线平台
考虑图5所示的微波天线平台,其停靠在一个塔式平台上。在此类通信系统中,数据链路的可靠性取决于指向角的精度。为了维持指向角,可能需要手动调整,特别是地震或其他原因扰动了天线所停靠的平台之后。此类远程维护的成本高昂,而且不及时响应,因此,作为维护响应策略的一部分,一家天线运营商正研究利用MEMS加速度计监控天线方向变化的可行性。
工程师们根据最基本的功能要求开始了此次调研:维持各天线平台的可靠通信。该系统中,可靠的数据通信要求天线指向角始终位于天线的半功率波束宽度(HPBW,参见图5)以内。因此,他们决定:如果天线在短时间内的方向变化达到天线HPBW的25%,那么就触发一次实地维护需求。
在支持此目标的误差预算内,架构师允许倾斜测量的峰值噪声为测量目标(HPBW的25%)的10%。为简明起见,架构师还指定噪声峰值等于噪声均方根(rms)值的3倍。方程7反映了所有这些限定条件,并将其简化为一个关系式,即倾斜测量中的噪声必须小于HPBW/120。








 QQ交流群
QQ交流群

