

摘要:由于在台球教学和平时练习中,捡球和摆球非常麻烦,本文提出一种台球机器人将代替人完成捡球和摆球这种枯燥的任务。针对机器人的需求设计了一种基于台达PCI-DMC-A01轴卡和伺服作为执行器的台球机器人。系统能根据指令实现机器手的精准定位,捡球,摆球,不会出现叠球现象。并能够实现异摆出系统球谱,基本实现远程对战的功能。该系统实验成熟后即将推向全国,将对中国的台球竞技培训和训练,以及为未来的台球网上对战产生深远的影响,因此,该系统具有广阔的市场前景和非常大的实用价值。
关键词:台达,PCI-DMC-A01,台球,机器人
1引言
在台球教学和平时练习中,捡球和摆球是最麻烦。为了对练习此项运动的选手一个一致的训练环境,提高职业技能,并且可以有效的评价选手在训练后水平能够达到的一个程度,需要一种设备可以帮助完成从选手训练到后期评价考核全部内容。本文提出一种台球机器人将代替人完成捡球和摆球这种枯燥的任务。本文针对台球机器人的需求设计了一种台达轴卡和台达伺服系统的移动台球机器人。在鹰眼视觉基础上,台球机器人系统主要具有以下功能:
(1)通过此设备可以确定球在球桌的固定位置点,并且可以重新把球移动到一个特定的位置,以便选手可以重复练习,或者考试。
(2)可以进行远程控制,或者更复杂的以训练和应试为目地的动作。
(3)可以实现两个选择手异地对战,或者辅助训练。
在进行台球机器人设计时,重点需要考虑设计的成本、机器人的质量,电机类型和功率等因。为了提高机器人的捡球效率,应尽量减少一些区域的多次重复行走,并确保不叠球,不碰球和不漏球。因此,找到一种符合上述目标的机器人的控制算法和一套能实现上述功能的伺服系统尤为重要的。
2控制系统设计和执行器选择
2.1机械模型建立及各轴控制要求
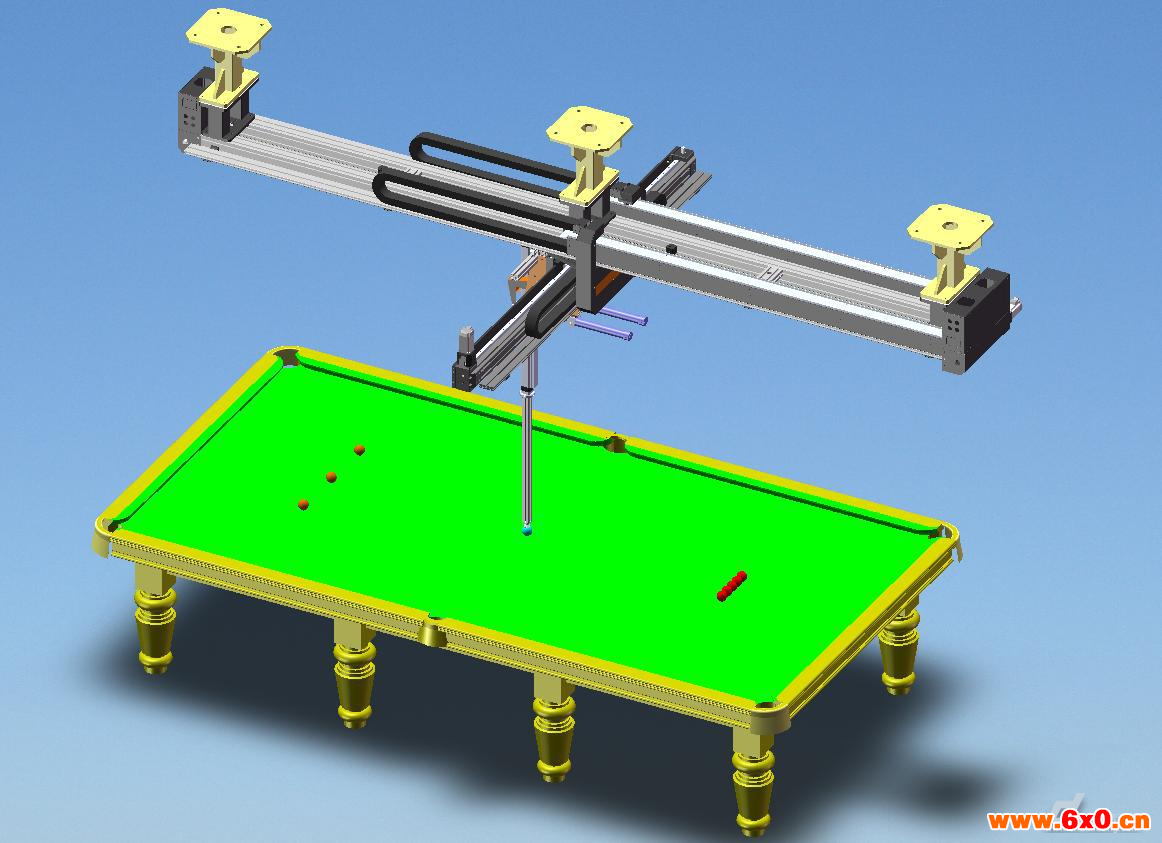
图1台球机器人模型
如图1所示,X轴为垂挂结构,此结构由两组工业铝材构成直线引动主支撑架,在其下部安装有直线导轨,并且由双T5齿形聚胺脂同步驱动中间滑板来实现运动。该设计同时可以满足X轴框架的刚度及运动精度要求外,并且在安装,调整精度上容易实现。轴根据计算,电机需要采用750W或以上伺服电机与之匹配的减速机减速比为4:1,需要2组极限传感器和1组原点传感器。
Y轴为垂挂结构,此结构由1组工业铝材构成直线引动主支撑架,在其下部和侧面同时安装有直线导轨,并且由1组T5齿形聚胺脂同步驱动中间滑板来实现运动。该设计同时可以满足Y轴框架的刚度及运动精度要求外,并且在安装,调整精度上容易实现。轴根据计算,电机需要采用400W或以上伺服电机与之匹配的减速机减速比为4:1,需要2组极限传感器和1组原点传感器。
Z轴主要由两部份够成。用于垂直方向折叠的轴,用于完成Z轴方向轴杆的收缩折叠,包括主要用于收缩的无杆气缸和用于旋转的气缸构成,气缸各付带两组位置传感器用于检测位置。用于台球工作状态举升的轴,包括一组升降气缸完成,气缸付带有两组位置传感器用于检测位置。Z轴还包括用于吸台球的真空吸嘴全部气缸控制气动由电磁阀组完成,其中电磁阀组还包括控制真空吸嘴的吸球动作,此外气路还有用于产生真空的真空发生器。
2.2基本运动控制说明
(1)初始化动作
在设备开机后,X,Y轴需要有一个单向运动返回来找X,Y轴原点,以确定X,Y轴的初始位置。Z轴需要为返回最下位置点做准备,无杆气缸和用于旋转的直线气缸分别动作以保证吸气嘴已经垂直于球桌表面,这时用于升降的气缸应该在上位,以保证吸嘴和台球的安全距离。
(2)台球的搬移过程
当接收到程序令后,X,Y轴电机同时起动带动吸嘴平移,插补运动找到目标点,停止后,升降气缸下移,吸嘴接触台球,真空阀打开,吸起台球,真空感应开关判断是否真空,关断阀切断气路,升降气缸上移,带动台球上移,X,Y轴重新带动吸嘴台球平移到新的目标点上方,升降气缸下移,关断阀打开,真空破坏阀加电,真空消失,台球稳定在台面上,真空感应开关判断是不是常压,升降气缸重新上移,吸嘴离开台球,重新找下一目标点,重复动作。
(3)完成返回动作
当完成所有目标台球移动后,升降气缸上移,无杆气缸上移回缩,并且用于旋转的气缸反向动作把Z轴旋转至平行于球桌表面,完成Z轴的折叠动作后,同时给上位机信号。
2.3控制器设计和设备选型
台达PCI-DMC-A01控制卡是台达顺应多轴运动控制技术的发展趋势,推出了全新通讯型PCI总线高速运动控制轴卡——通过内建独特的DMC-NET总线,可高速连接各种装置,例如伺服马达、步进马达、远端模块、DD马达,直线马达等。再配合台达自主研发的高精度与高性能伺服系统,将不仅大大提升设备的整合能力,而且还将节省成本和配线。所有装置均挂到DMC-NET总线上,不必再配置针对不同驱动器的脉冲、模拟量、IO接口板,避免了接口类型太多带来的系统兼容性和稳定性的问题。在固定的1ms指令周期内可交换12轴马达的数据。依托自身高稳定度的DMCNET总线,搭配台达A2系列伺服驱动器,构成很高稳定度的控制系统,降低了干扰杂波的产生,系统可靠性和抗干扰能力大幅提升。台达DMC控制卡比传统控制卡的优势主要有:
因此,系统控制器选用台达PCI-DMC-A01控制卡,X轴选用台达1kWASD-A2-1021-F伺服驱动器和1KWECMA-E11310ES伺服马达;Y轴选用台达750WASD-A2-0721-F伺服驱动器和750WECMA-C10807ES伺服马达。系统控制结构如图2所示。
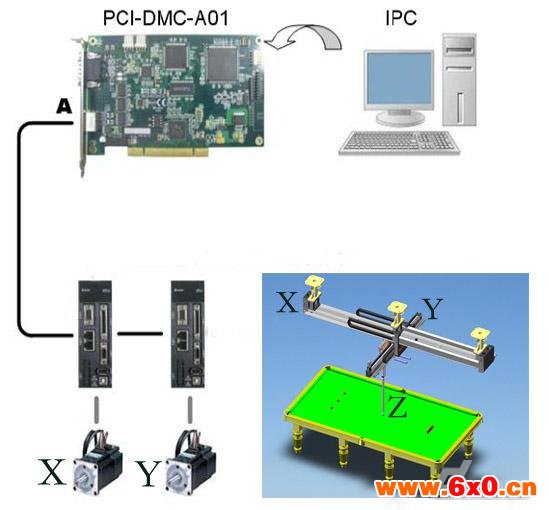
图2控制系统结构图
3控制算法选择和控制程序编写
3.1控制算法选择
路径规划根据对环境信息的把握程度可划分为全局路径规划和局部路径规划。其中,全局路径规划需要掌握关于环境的所有信息,根据环境地图进行大粒度的路径规划,在全局路径规划算法领域,经典方法大致可以分为以下四类:基于图的方法、基于栅格的方法、势场法和数学编程法。从获取障碍物信息是静态或是动态的角度看,全局路径规划属于静态规划,局部路径规划属于动态规划。本文主要探讨如何利用蚁群算法来解决机器人的全局路径规划问题,找到一条优化的捡球行进路径[1-6]。
在基于图的路径规划方法中,路径图由捕捉到的存在机器人的一维网格曲线在自由空间中的结点组成,所建立起来的路径图可以看作是一系列标准路径,而路径的初始状态和目标状态同路径中的点相对应,这样路径规划问题就演变为在这些点之间搜索路径的问题。由于在本系统中机器人路径中的各个起始点和目标点都已经由鹰眼系统给定,因此本系统选择图的方法做为机器人的控制算法,并对原有的算法进行了改进,对每个球的路径进行编号,并加入了防止叠球算法。
3.2控制程序编写
根据控制要求编写控制程序,首先开机后系统等待捡球命令,接到捡球命令后,系统从鹰眼获取去的坐标位置和球的目标坐标位置,然后通过所设计的路径规划算法进行路径规划,找到一种最优的移动路径,并对每个需要移动的球进行编号。并进一步加入了防叠球处理程序和安全防护处理程序,对捡球和放球也做了防抖处理。控制程序流程图如图3所示,控制程序监控界面如图4所示,斯诺克(Snooker)球桌长约3569毫米、宽1778毫米,台面四角以及两长边中心位置各有一个球洞,使用的球分为1个白球,15个红球和6个彩球共22个球。本程序监控界面根据实际球桌比例缩放制作。控制参数设置如图5所示。
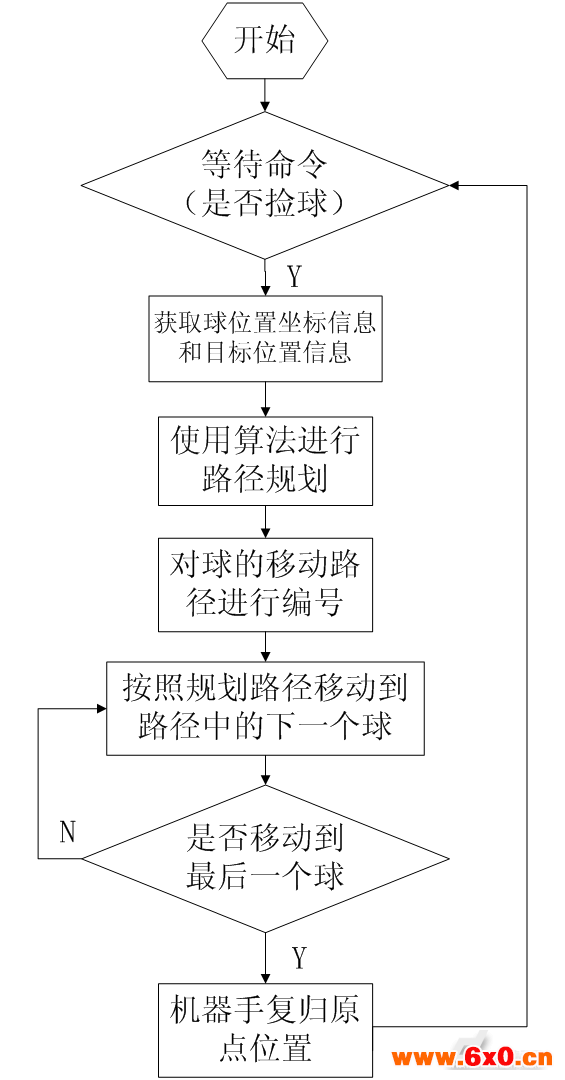
图3控制程序流程图
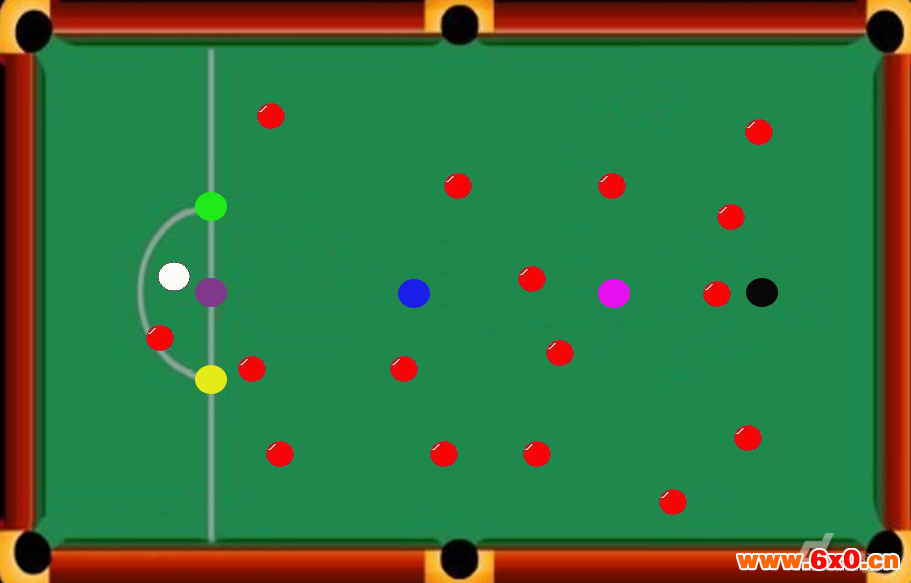
图4控制程序监控画面监控画面
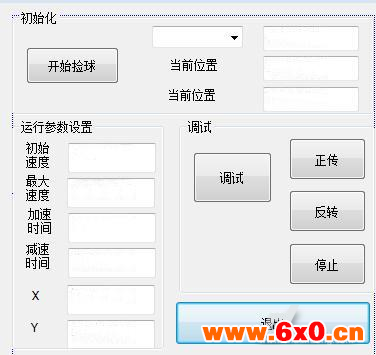
图5控制参数设置
4结论
本文系统是在国家体育总局某部门的主导下完成的,设计的台球机器人系统采用了台达PCI-DMC-A01控制卡,1kWECMA-E11310ES和750WECMA-C10807ES伺服马达作为执行器,采用基于图的方法做为主要路径规划算法,并对算法做了改进,加入了防抖、放叠球处理程序和安全防护的处理程序。通过大量的实验和现场应用证明,该系统能根据指令实现机器手的精准定位,捡球,摆球,不会出现叠球现象。并能够实现异地摆出系统球谱,基本实现远程对战的功能。下一步在控制算法上和远程对战上需要进一步改善。该系统实验成熟后即将推向全国,首先在在各大台球协会应用。将对中国的台球竞技培训和训练,以及为未来的台球网上对战产生深远的影响,因此,该系统具有广阔的市场前景和非常大的实用价值。
参考文献
[1]胡文,孙容磊.基于序列图像的视觉定位与运动估计[J].传感器与微系统,2007(07).
[2]董志刚,郭隆建.探究智能型清洁器的移动模式[J].长沙大学学报,2010(02).
[3]高庆吉,石朝侠,姜延,等.全自主足球机器人在不确定信息下的位置规划[J].东北电力学院学报,2002(04).
[4]于涛,韩清凯,孙伟,闻邦椿,等.基于隐Markov模型的图像方位识别[J].东北大学学报,2006(03).
[5]张奇志,梁力,林韵梅,等.带宽优化的进化算法[J].东北大学学报,1996(03).
[6]苏永涛,仉俊峰.基于图论方法的路径规划应用[J].电测与仪表,2012(01).








 QQ交流群
QQ交流群

