

西克中国的目标:成为柔性自动化的参与者,而机器人是柔性自动化的一部分。
一、机器人柔性自动化
柔性自动化生产技术简称柔性制造技术,它以工艺设计为先导,以数控技术为核心,是自动化地完成企业多品种、多批量的加工、制造、装配、检测等过程的先进生产技术。它涉及到计算机、网络、控制、信息、监测、生产系统仿真、质量控制与生产管理等技术。
● 那什么是基于机器人的柔性自动化呢?
简单来说,就是机器人单元的建立以便在生产过程中能比较容易地根据需求作出改变。

● 柔性自动化有以下要求:
√ 标准化设计
√ 易于配置
√ 可能适应于有差异的产品
√ 可靠
● 对于终端用户来说,柔性自动化能够:
√ 降低操作成本
√ 降低投资成本
√ 改善工作环境
● 机器人柔性自动化的基本原理:
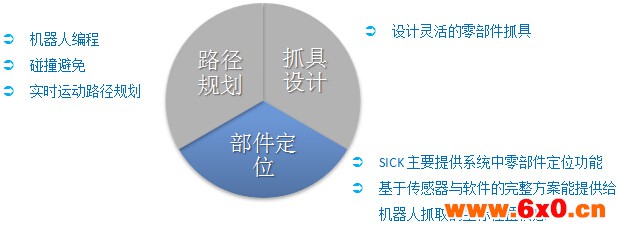
二、两种基于机器人的零部件抓取的解决方案:

PLB视觉系统:
PLB主要用于箱体中零部件的定位,它包含一个用于获取高质量图像数据的3D相机,和用于3D图形匹配的零部件CAD文件,以及用于机器人集成的工具。它的作用就是使机器人拾取箱体中的物体。
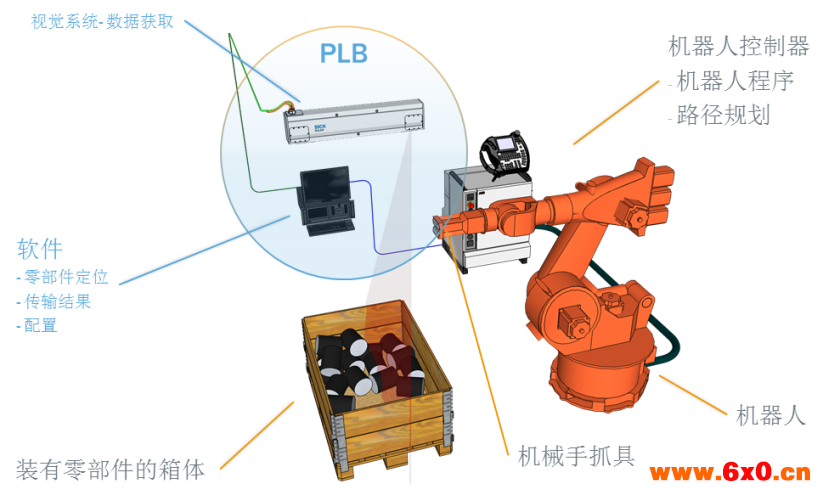
上图所示为箱体内零部件拾取系统的组成部分。其中PLB系统包含了3D视觉系统,用于获取箱体部分的3D点云数据,以及相应的软件。其功能主要包含:读取抓具和零部件的3D CAD文件模型数据,做相应的碰撞,重叠计算处理;与机器人进行相应的通讯;对系统进行配置;基于3D点云数据选择拾取的零部件,并向机器人控制器输出对应的坐标。
下图为PLB视觉传感器的扫描范围示意图:
其中3D相机为 ScaningRuler ,它发出一条红色的激光线,能测量物体的轮廓,由于内部有一个旋转机构,能够带动激光线旋转一定的角度,如下图所示,因此,3D相机固定安装,通过内部装置的旋转,能够测量到相机下方的3D场景。
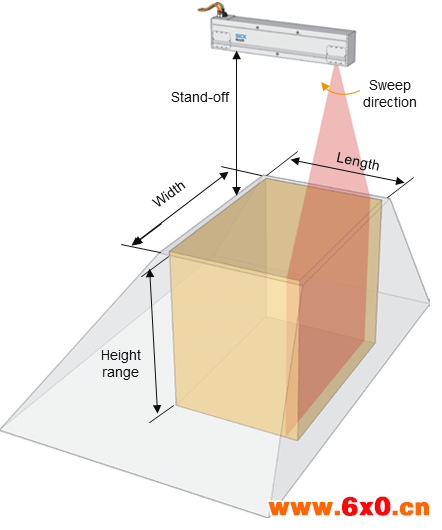
◆ 离物体上表面最小距离(stand off):1000 mm
◆ 最大距离:2000 mm
◆ 最大高度范围(height range):1000 mm
● (height range + stand - off = max distance)
◆ 视野范围 Volume Of View- VOV (LxWxH):
● 800x1200x1000mm (stand -off为1 m)
● 1000x1200x750 mm ( stand-off为1.25m)
◆ 扫描速度:
● 3 秒/图片, 即扫描整个3D场景需要3s
◆ 分辨率
● 1-4 mm, 与到相机的距离相关
● 1 mm (x,y,z) @ 到相机距离为1m
● 4 mm (x,y,z) @到相机距离为2m
◆ 精度
● 对应于上面的分辨率
三、PLR视觉系统
PLR是一个独立的视觉系统,它包含了相应的软件和工具,能够在卸载过程中(de-racking)对零部件特定的部位进行定位,以便机器人对部件进行抓取。
它是基于2D视觉+3D视觉原理来进行定位,2D视觉是对特定部位进行图像匹配,3D视觉是它能够发出十字形的激光线,用于计算该部件的倾斜角度。
下图为PLR视觉系统的应用示意图:

◆ 模式匹配(2D) 和激光三角测量原理 (3D)能够计算出部件的位置信息(X, Y, Z, Rx, Ry, Rz)
◆ 工作距离:365 mm
◆ 视野大小:225x170 mm
◆ 定位精度:
● +/- 0,5mm (X,Y,Z)
● +/- 0,1º (Rx, Ry, Rz)
◆ 定位时间:< 500 ms
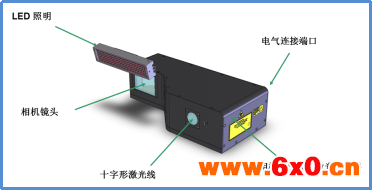
下图是PLR系统的基本构成示意图:
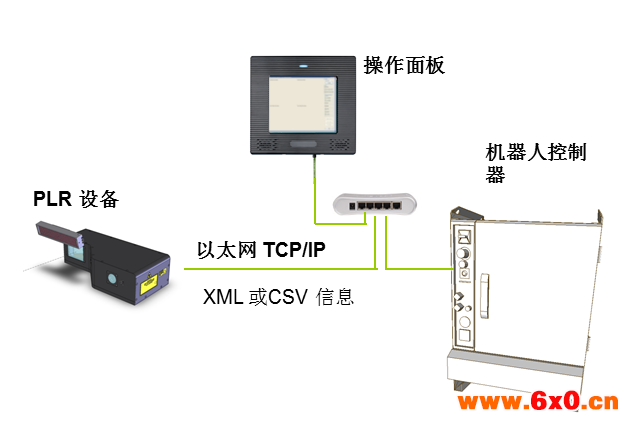
首先通过PLR设备对部件的特定区域进行学习。在定位过程中,基于特征部位的缩放大小,X,Y,Z偏移量进行初步定位。如果精度不在范围内,需要机器人调整相机的姿态和位置,对相机重新对齐,直到满足在一定的精度范围内。
PLR和PLB视觉系统结合机器人在汽车行业,机械制造与零部件供应等领域有广泛的应用前景。上述技术的深度应用将会为机器人应用注入新兴力量,并随之带来产业结构优化。西克中国可依托该市场环境及自身产品优势,加强此技术应用的推广,从而取得与客户的共赢。









 QQ交流群
QQ交流群

