

前言
随着机器人技术的迅速发展及其在工业、军事等领域中的广泛应用,有关智能机器人的理论、设计、制造和应用的新的技术科学---机器人学,已逐渐形成,并越来越引起人们广泛的关注。智能机器人的研究将进入了一个崭新的阶段。同时,太空资源、海洋资源的开发与利用为智能机器人的发展提供了广阔的空间。目前,智能机器人,无人自主车等领域的研究进入了应用的阶段,随着研究的深入,对智能机器人的自主导航能力,动态避障策略,避障时间等方面提出了更高的要求。地面智能机器人路径规划,是行驶在复杂,动态自然环境中的全自主机器人系统的重要环节,而地面智能机器人全地域全自主技术的研究,是当今国内外学术界面临的挑战性问题。
控制机器人的问题在于模拟动物运动和人的适应能力。建立机器人控制的等级——首先是在机器人的各个等级水平上和子系统之间实行知觉功能、信息处理功能和控制功能的分配。第三代机器人具有大规模处理能力,在这种情况下信息的处理和控制的完全统一算法,实际上是低效的,甚至是不中用的。所以,等级自适应结构的出现首先是为了提高机器人控制的质量,也就是降低不定性水平,增加动作的快速性。为了发挥各个等级和子系统的作用,必须使信息量大大减少。因此算法的各司其职使人们可以在不定性大大减少的情况下来完成任务。总之,智能的发达是第三代机器人的一个重要特征。
运动控制器是智能机器人的执行机构,对机器人的平稳运行起着重要作用。随着新的智能控制算法的不断涌现,智能机器人正向着智能化方向发展,MATLAB提供了一个高性能的数值计算和图形显示的数学和工程计算软件环境。这种易于使用的MATLAB环境,是由数值分析、矩阵计算、信号处理和图形绘制等组成。在这种环境下,问题的解答表达方式几乎和他们的数学表达方式完全一样,不像传统的编程那么复杂。MATLAB是一种交互式系统,他的基本数据单元是无需指定维数的矩阵,所以在解决数值计算问题时,使用MATLAB要比使用诸如Basic、Fortran和C等语言编程简单得多,大大提高了编程效率。
1控制系统结构功能
智能机器人运动控制系统是整个智能机器人的基础,可靠的运动控制系统是智能机器人实验设计的前提。设计智能智能机器人控制系统构成图如图1所示。
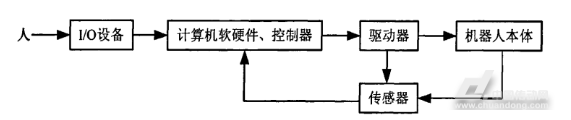
图1智能机器人控制系统构成图
开发人员在上位机进行智能机器人的软件开发,同时上位机也是整个智能机器人的控制中枢,上位机接收各信息采集模块提供的环境信息,给出智能机器人控制指令控制机器人智能。机器人本体上安装有四个驱动电机,作为智能机器人的驱动机构。每个驱动电机都带有一个光电码盘,光电码盘提供正交编码脉冲信号,可用作驱动电机闭环调速和机器人定位脉冲。车载处理器主要负责超声波测距模块控制、模块管理、机器人定位以及和上位机的通信,可以采用通用计算机、大容量单片机、DSP、ARM等嵌入式控制器。如果采用通用计算机,那么开发上位机就不用独立于车载处理器之外了。智能机器人输入信息包括视觉输入和距离检测。视觉信息包括全景视觉和双目视觉摄像机。距离信息包括激光测距和超声波测距模块。智能机器人根据开发人员事先建立好的环境地图,智能过程中读取的环境信息,在处理器内根据控制规则进行运算,输出控制信息到驱动电机,控制机器人的智能。
智能机器人的车载处理器和上位机作为处理中枢,接收激光、超声波等测距模块提供的障碍物距离信息,全景、双目视觉提供的视觉信息。结合上位机中的预设功能,通过控制驱动电机控制机器人完成相应动作。
2改进的模糊神经网络PID控制
2.1控制系统结构
结合钻杆自动排放系统构建控制系统结构如图2所示,将机械手位置作为被控制量。
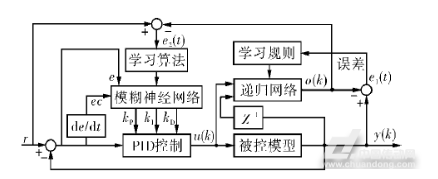
图2改进的模糊神经PID控制结构图
图中e和ec分别为误差和误差变化率,输入r为机械手位置,输出y为机械手实际输出。
2.2模糊神经网络的结构
该模糊神经网络为4层,如图3所示。第l层为输入层;第2层为模糊化层;第3层为模糊推理层;第4层为输出层。模糊神经网络结构为2–6–6–3。
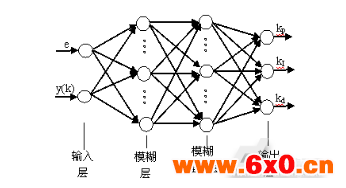
图3.模糊RBF神经网络的结构
(l)输入层。该层将输入误差e和系统实际输出y(k)作为下一层的输入。活化函数为:

因此本层的输出为e和y(k)
模糊化层。活化函数即为该隶属度函数。因此,输出为:
其中,i=l,2;j=l,2,...6。cij和bij分别为高斯函数第i个输入变量的第j个模糊集合的隶属函数的均差和标准差。
(3)模糊推理层。将上层中的模糊量经过两两相乘,得到这一层的输出值。因此,本层的活化函数,即输出为:
这里k=l,2,3,4,5,6。
输出层。这一层要输出的就是PID控制器的参数,本层的输出值就是将权值以矩阵乘的方式,乘以第3层的输出。因此,本层的输出为:
增量式PID控制的控制量为

目标函数为:

其中r(k)为期望输出。
3系统仿真研究
以用Simulink公共模块库中的模块建立运动学仿真模型。但当机器人的运动学方程较复杂时,这种方法就显得繁琐。简便的方法是采用基于MATLAB函数的运动学仿真,这种方法主要通过用MATLAB语言编写MATLAB函数,来求解机器人的运动学方程和逆运动学方程,从而建立机器人的运动学仿真模型。
图4基于MATLAB函数的运动学仿真模型
基于MATLAB函数的智能机器人的运动学仿真模型如图4所示,并编制了求解运动学方程函数以和求解逆运动学方程函数。图4中机器人的末端位置指令坐标(xi,yi)由轨迹规划给出,经过MATLAB函数的逆运动学模块调用运算后,得到关节1、2的转角信号θ1和θ2,再由MATLAB调用函数运动学运算,得到机器人的末端轨迹如图5所示。
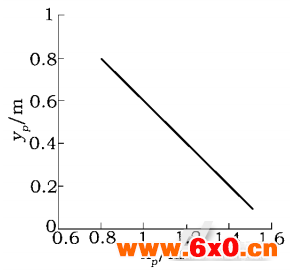
图5机器人的末端运动轨迹
4结论
基于MATLAB函数的仿真模型既可以进行运动学仿真,又可以进行逆运动学仿真通过参数设置及仿真类型选择,可以方便地进行动力学仿真,但不能进行逆运动学仿真。虚拟现实工具箱可以在Simulink接口环境中运行,很容易通过图形用户界面来进行交互。虚拟世界环境可以在V-RleamBuilder中编辑,再使用虚拟现实工具箱建立与Simulink模型的联系,并对该虚拟世界进行模拟使用MATLAB模糊工具箱实现了一种机器人的路径跟踪程序控制。









 QQ交流群
QQ交流群

