

1引言
地图创建是移动机器人一个基本而且十分重要的技术,它是移动机器人在未知环境中导航定位及路径规划等技术的基础[1]。对于移动机器人地图创建这个问题我们可以这样理解:从任意时刻,任意位置开始,一个移动机器人应该能够通过所带的传感器探索环境,获取相关的环境信息,从而构建合适的地图[2]。
目前移动机器人常用的地图表示方法有二种,一是占据网格法,用每一个网格被占据的概率值来表示环境信息,但网格地图的精确度不高[3]。二是基于几何的表示方法,利用线段、弧线来表示环境信息。几何地图信息存储量小,可以直接应用在移动机器人的导航和路径规划上[4]。目前国内外普遍用采的超声波、红外等传感器进行移动机器人的导航研究,他们普遍存在精度低的问题。激光传感器与他们相比就具有获取数据的速度快,精度高的优点[5]。
本文通过激光传感器采集的室内环境的特定平面环境信息,将信息中的数据点利用最小二乘法分段拟合成直线,通过计算距离方差对拟合出来的直线进行滤波得到有效线段,将有效线段合并以几何信息表示出来,得到当前的局部地图。在将每帧得到的局部地图相互匹配,获得全局地图。
2未知环境地图创建
环境地图的创建分为两种,环境局部地图创建及全局地图创建。
2.1局部地图创建
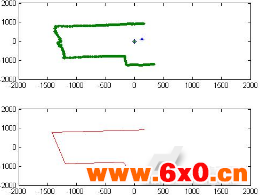
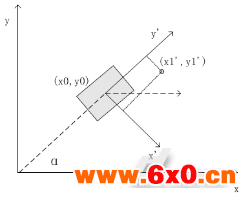
图2局部坐标系与全局坐标系的关系图
2.3全局地图创建
选取第一帧局部地图作为当前的全局地图,在完成当前帧的直线特征提取后(即完成局部地图创建),将得到的局部地图与当前的全局地图相匹配,得到他们之间线段的关系,从而得到他们之间相关的特征点。然后通过特征点计算局部地图与全局地图的偏移矩阵,将局部地图融合到全局地图中,更新全局地图。
3实验结果及分析
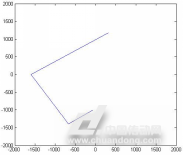
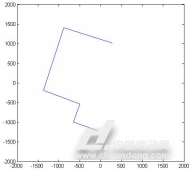
本实验采用激光传感器,它的测距范围为0.02m-4m,扫描角度范围240°,频率100ms,角分辨率0.35°。通过对激光数据处理,提取直线特征,将最小二乘法拟合的直线合并,再根据点和直线特征结合的匹配方法对局部地图和全局地图进行匹配,得到全局地图。生成的局部地图和全局地图如图3-4所示。
(1)
(2)
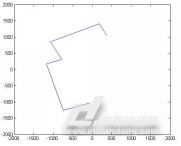
(3)局部地图
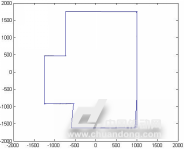
(4)全局地图
本算法在最小二乘法拟合直线的过程中,将所有的数据点按很小的间隔分成n簇点集,分别对每簇点集拟合直线,舍弃偏差较大的直线。对于近似平行的直线,将它们合并,重新提取直线特征。通过这种方法,能够有效地抑制噪声对局部地图创建的影响。在匹配的过程中,通过求取偏移矩阵,将局部地图由机器人的车体坐标系转换到全局坐标系中,这种方法与单纯的依靠直线特征匹配的方法相比较,能够更好的减小在匹配过程中造成的误差。实验证明本算法具有精度高,复杂程度低,实时性高等优点,适合结构简单的室内环境。
4结论
地图创建是移动机器人在未知环境中实现自主导航的先决条件。本文提出一种通过最小二乘法拟合直线,采用点跟直线特征结合的匹配方法创建全局地图的算法,研究结果证明,本算法能够很好的完成只有直线特征的简单室内环境的地图创建工作。









 QQ交流群
QQ交流群

