

前言
机器人是近年来发展起来的一门综合学科,它集中了机械工程、电子工程、计算机工程、仿生学、自动控制工程以及人工智能等众多学科的最新科研成果,代表了机电一体化的最高成就,是目前科技发展最活跃的领域之一。目前,机器人技术已经取得了很大的发展,产生了各种各样的机器人,如工业机器人,爬壁机器人,排爆机器人,水下机器人,它们都已经在生产和生活中得到了广泛的应用,发挥了巨大的作用。
智能步行机器人是机器人中科技水平最高的,随着人工智能和自动控制等技术的不断发展,有了许多成功地例子,如本田的P2,ASIMO,索尼的SDR-3X,SDR-4X等。它们在灵活性,稳定性,步行速度等方面都得到了很大的改进,已经能够行走和摆出各种动作,可以演奏乐曲,跳舞和踢球。尽管如此,这些步行机器人的用处还是十分的有限,在长距离行走、负重、成本以及在复杂环境下的适应能力等方面存在许多的问题,还不能广泛的应用于人们的日常生活中,现在主要用于示教、展览和礼仪接待。
CAN(ControllerAreaNetwork)总线最早是由德国Bosch公司推出,用于汽车内部测量与执行部件之间的数据通信协议。其总线规范已被ISO国际标准组织制定为国际标准,并且广泛应用于离散控制领域。它也是基于OSI模型,但进行了优化,采用了其中的物理层、数据链路层、应用层,提高了实时性。其节点有优先级设定,支持点对点、一点对多点、广播模式通信。各节点可随时发送消息。传输介质为双绞线,通信速率与总线长度有关。CAN总线采用短消息报文,每一帧有效字节数为8个;当节点出错时,可自动关闭,抗干扰能力强,可靠性高。基于CAN总线具有以上的特点,为工业控制系统高可靠性的数据传输提供了一种新的解决方案。CAN总线已成为最有发展前途的现场总线之一。
1 控制系统组成
控制系统是机器人的大脑,它的性能优劣直接影响到机器人的先进程度和功能强弱。助力行走机器人是一个机电一体化的设备,从控制系统观点来看,整个系统可分为五部分:机器人结构、控制器、传感器、环境和佩戴者,其中的控制器、机器人结构、传感器等部分构成了控制系统,各部分之间的关系如图1所示。
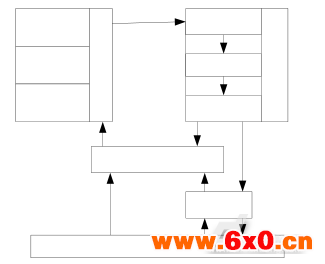
图1 控制系统相互关系
机器人控制器是根据传感器信息并按照一定的控制算法控制机器人完成一定的动作或作业任务的装置。机器人控制器有多种不同的控制策略:非伺服(开环)控制、伺服控制、基于传感信息的控制、最优PID控制、非线性反馈的动态补偿控制、自适应控制、变结构(滑模)控制、模糊控制等。
由于控制器功能的增多和速度的不断提高,控制器的研究已经由硬件过渡到软件、由具体控制器过渡到通用开放式体系结构、由单独控制过渡到多机协调控制,开发“具有开放式结构的模块化、标准化机器人控制器”已成为机器人控制器发展的一个方向
2 CAN总线
控制器局域网CAN为串行通信协议,能有效地支持具有很高安全等级的分布实时控制。CAN已经成为国际标准,并已被公认为几种最有前途的现场总线之一。
2.1CAN总线性能特点
CAN属于总线式串行通信网络,由于其采用了许多新技术及独特的设计,与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性。其特点可概括如下:
1、CAN是采用国际标准(ISO-11898)的现场总线,协议规范为CAN2.0PARTA,PARTB。
2、CAN为多主方式工作,网络上任一节点均可在任意时刻主动地向网络上其它节点发送信息,通信方式灵活。
3、在报文标识符上,CAN上的节点分成不同的优先级,可满足不同的实时要求,优先级高的数据最多可在134μs内得到传输。
4、CAN采用非破坏总线仲裁技术。当多个节点同时向总线发送信息出现冲突时,优先级较低的节点会主动地退出发送,而最高优先级的节点可不受影响地继续传输数据,从而大大节省了总线冲突仲裁时间。尤其是在网络负载很重的情况下,也不会出现网络瘫痪情况。
5、CAN节点只需对报文的标识符滤波即可实现点对点,一对多及全局广播等几种方式传送接收数据。
6、CAN的直接通信距离最远可达10km(速率5kbps以下);通信速率最高可达1Mbps(此时通信距离最长为40m)。
7、采用短帧结构,一次传送的字节为8个(CAN2.0A),而扩展标准(CAN2.0B)传
送的字节数为64个。这样传输时间短,受干扰概率低,具有良好的检错效果。
8、CAN总线具有较高的性能价格比。它结构简单,器件容易购置,每个节点的价
格较低,而且开发技术容易掌握,能充分利用现有的单片机开发工具。
2.2CAN总线分层结构
CAN协议是建立在国际标准组织的开放系统互联模型基础上的,其模型结构只有3层,如图2所示,即只取OSI底层的物理层、数据链路层和应用层。由于CAN的结构简单,又是范围较小的局域网,一般不需要其他的中间层,应用层数据直接取自数据链路层或直接向链路层写数据。结构层次少,有利于系统中实时控制信号的传送。
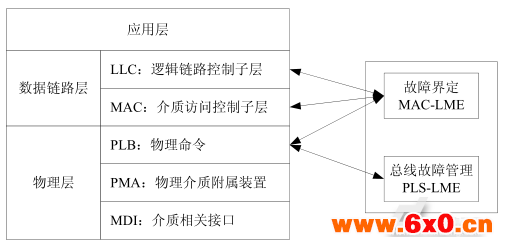
图2 CAN总线OSI模型
数据链路层包括逻辑链路控制子层(LLC,LogicallinkControl),介质访问控制子层(MAC,MediumAccessControl)。
3 CAN总线的控制网络设计
节点是网络上信息的接收和发送站,CAN总线系统中共有两种类型的节点;不带微处理器的非智能节点和带微处理器的智能节点。本文所设计的行走机器人系统采用的是智能节点,通过各个智能节点采集信号和执行上位机的指令。
图3中所设计的控制网络的主要通信单元组成,整个行走机器人主要有主控单元,信号采集单元,底层电机驱动单元三部分组成,三个部分通过CAN总线组成一个有机的整体,共同实现控制任务。其中的信号采集部分包括左右脚底的压力信号采集单元和下肢主要肌群部位的压力信号采集单元;底层电机驱动单元主要包括位于左右腿上髋关节和膝关节部位的智能驱动单元。
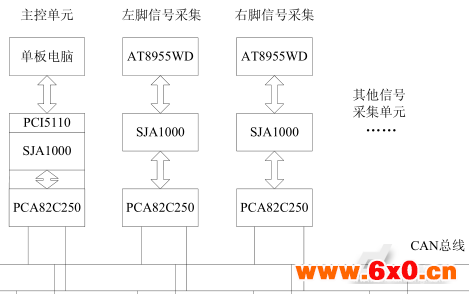
图3 基于CAN总线的控制网络
4 结论
本文主要介绍了步行机器人的发展状况,对CAN总线方式进行分析研究。结合行走机器人的特点进行控制系统和通信方式的选择,设计了基于CAN总线的行走机器人控制网络。本控制网络的主要由通信单元组成,整个行走机器人主要有主控单元,信号采集单元,底层电机驱动单元三部分组成,三个部分通过CAN总线组成一个有机的整体,共同实现控制任务。









 QQ交流群
QQ交流群

