

1引言
随着科学技术的发展,人类的研究活动领域已由陆地扩展到海底和空间。利用移动机器人进行空间探测和开发,己成为21世纪世界各主要科技发达国家开发空间资源的主要手段之一。研究和发展月球探测移动机器人技术,对包括移动机器人在内的相关前沿技术的研究将产生巨大的推动作用。
移动机器人是一种能够通过传感器感知外界环境和自身状态,实现在有障碍物的环境中面向目标的自主运动,从而完成一定作业功能的机器人系统。近年来,由于移动机器人在工业、农业、医学、航天和人类生活的各个方面显示了越来越广泛的应用前景,使得它成为了国际机器人学的研究热点。20世纪90年代以来,以研制高水平的环境信息传感器和信息处理技术,高适应性的移动机器人控制技术,真实环境下的规划技术为标志,开展了移动机器人更高层次的研究。目前,移动机器人特别是自主机器人已成为机器人技术中一个于分活跃的研究领域。
轮式移动机构具有运动速度快、能量利用率高、结构简单、控制方便和能借鉴至今已很成熟的汽车技术等优点,只是越野性能不太强。但随着各种各样的车轮底盘的出现,如日本NASDA的六轮柔性底盘月球漫游车LRTV,俄罗斯TRANSMASH的六轮三体柔性框架移动机器人Marsokohod,美国CMU的六轮三体柔性机器人Robby系列以及美国JPL的六轮摇臂悬吊式行星漫游车Rocky系列,已使轮式机器人越野能力大大增加,可以和腿式机器人相媲美。于是人们对机器人机构研究的重心也随之转移到轮式机构上来,特别是最近日本开发出一种结构独特的五点支撑悬吊结构Micros,其卓越的越野能力较腿式机器人有过之而不及[6-8]。
轮式结构按轮的数量分可分为二轮机构、三轮机构、四轮机构、六轮以及多轮机构。二轮移动机构的结构非常简单,但是在静止和低速时非常不稳定。三轮机构的特点是机构组成容易,旋转中心是在连接两驱动轮的直线上,可以实现零回转半径。四轮机构的运动特性基本上与三轮机构相同,由于增加了一个支撑轮,运动更加平稳。以上几种轮式移动机构的共同特点是它们所有的轮子在行驶过程中,只能固定在一个平面上,不能作上下调整,因此,地面适用能力差。一般的六轮机构主要就是为了提高移动机器人的地面适应能力而在其结构上作了改进,增加了摇臂结构,使得机器人在行驶过程中,其轮子可以根据地形高低作上下调整,从而提高了移动机器人的越野能力。
2机器人主体结构设计
主体结构为机器人的主要结构,里面包括了控制系统,四个驱动电机以及一些传感器,传感器包括有红外传感器,压敏传感器,声音传感器等用来充当机器人的眼睛、触觉和听觉功能。结构主要为一箱体结构,里面按需要放置电机及系统硬件。主体结构如图1所示。
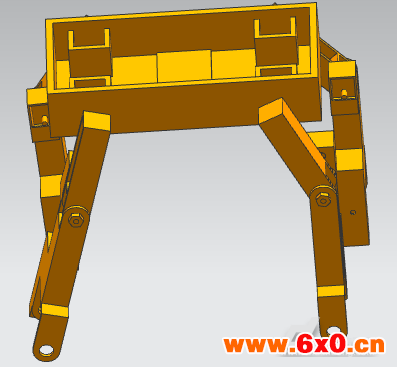
图1机器人主体机构图
图1中整个主体是没有加上任何传感器和装置的外壳,四个小箱体是安放控制上肢的电机,旁边的孔是用来通过电线的,大箱体中间是安放控制系统的电板。在整个零配件都安放好以后可在上方添加一块板用来保护内部元件。按照我的设想,在这个机器人的基础上可以在主体上方添加其他功能。主体长1.5米宽0.5米高0.3米。
对于下肢部分,由于麦克纳姆轮可以进行全方位的移动,故不需要加入关节,但需要加入刹车系统,以保证及时停车和在使用腿部功能时不发生滚动,同时在下肢与轮胎连接处设计平台安放电机,使其驱动轮胎转动。一个轮胎对应一个电机,这样才能通过改变每个轮胎的转速来控制方向等复杂的移动。
下肢除了像上肢一样的结构外,多加了两个在旁边的箱体结构,并且下部分较宽大是用来与轮胎相连。上面的箱体是用于装一个小型电机,通过下肢上端两个同轴的孔与一根轴相连,来控制下肢绕上肢的转动,而箱体的旁边上端的孔是用来通过电线。下面的箱体是存放控制轮胎的电机,右边有用来安放齿轮的空间和通孔来固定齿轮。下肢两个竖直的同轴孔也是用来通过电线的。下肢总长约1米,下肢主体宽度约20厘米。
3轮式移动原理
轮式移动原理主要的为麦克纳姆轮的移动原理。
麦克纳姆轮是瑞典麦克纳姆公司的专利。这种全方位移动方式是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法相力上面。依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量从而保证了这个平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。在它的轮缘上斜向分布着许多小棍子,故轮子可以横向滑移。小滚子的母线很特殊,当轮子绕着固定的轮心轴转动时,各个小滚子的包络线为圆柱面,所以该轮能够连续地向前滚动。麦克纳姆轮结构紧凑,运动灵活,是很成功的一种全方位轮。有4个这种新型轮子进行组合,可以更灵活方便的实现全方位移动功能。
麦克纳姆外形像一个斜齿轮,轮齿是能够转动的鼓形辊子,辊子的轴线与轮的轴线成α角度。这样的特殊结构使得轮体具备了三个自由度:绕轮轴的转动和沿辊子轴线垂线方向的平动和绕辊子与地面接触点的转动。这样,驱动轮在一个方向上具有主动驱动能力的同时,另外一个方向也具有自由移动(被动移动)的运动特性。轮子的圆周不是由普通的轮胎组成,而是分布了许多小滚筒,这些滚筒的轴线与轮子的圆周相切,并且滚筒能自由旋转。当电机驱动车轮旋转时,车轮以普通方式沿着垂直于驱动轴的方向前进,同时车轮周边的辊子沿着其各自的轴线自由旋转。图2为麦克纳姆轮的各结构和运动参量。
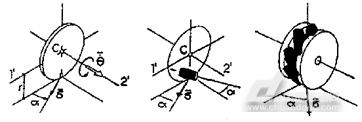
图2麦克纳姆轮运动参量的定义
4伺服控制系统设计
移动机器人的运动控制系统是机器人系统的执行机构,对系统精确地完成各项任务起着重要作用,有时也可作为一个简单的控制器。构成机器人运动控制系统的要素有:计算机硬件系统及控制软件、输入/输出设备、驱动器、传感器系统,它们之间的关系如图3所示。
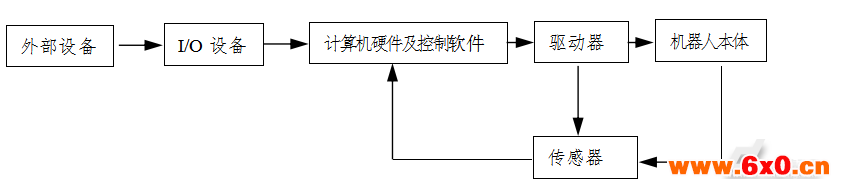
图3机器人控制系统构成要素
4.1移动机器人控制系统的研究
(1}移动机器人体系结构。利用分布式智能结构可以提高移动机器人的实时性和鲁棒性,并减小移动机器人的体积和自重,使机器人更加轻便、灵活。
(2)控制系统中的传感器技术。移动机器人传感器技术主要是对机器人自身内部的位置和方向信息以及外部环境信息的检测和处理。获取真实有效的环境信息,是控制系统进行决策的保证。通常采用的传感器分为内部传感器和外部传感器。内部传感器主要包括:编码器、线加速度计、陀螺仪、磁罗招等。外部传感器主要包括:视觉传感器、超声波传感器、红外传感器、接触和接近传感器等。
(3)控制系统的多传感器信息融合技术。多传感器信息融合是把分布在不同位置的传感器所提供的局部环境的不完整信息加以综合,消除多传感器之间可能存在的冗余和矛盾,以降低其不确定性,形成对系统环境的相对完整一致的感知描述,从而提高智能系统决策、规划的快速性和正确性,同时降低决策风险。
(4)控制系统的开发技术。重点研究开放式、模块化控制系统。移动机器人控制器结构的标准化,以及网络式控制器成为研究热点。编程技术进一步提高在线编程的可操作性,离线编程的人机界面更加友好、自然语言化编程和图形化编程的进一步推广也是今后研究的重点。
(5)运动控制技术。机器人运动必须足够快,受控并安全,避开静态和动态的障碍。轨迹跟踪、路径跟踪、点镇定是移动机器人运动控制的三个基本问题;
(6)控制系统的智能化技术。控制系统的智能特征包括知识理解、归纳、推断、反应和问题求解等内容。涉及领域包括图像理解、语音和文字符号的处理与理解、知识的表达和获取等方面。智能控制方法常使用神经网络和模糊控制方法,但前者往往伴随着对存储容量、运算速度的较高要求,这与移动机器人高速高精度运动控制的要求存在一定差距,故模糊控制方法在机器人控制方面有着较大的优势。
根据移动机器人控制系统的设计要求,结合本机器人的系统功能和特点,按照模块化的设计思想,提出了机器人控制系统总体设计方案。如下图所示:
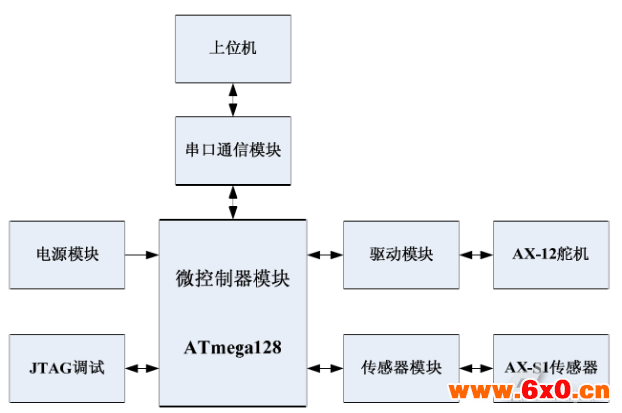
图4控制系统总体方案
控制系统总体设计方案
该方案是以ATmega128芯片为核心,分模块化设计,各子模块功能为:
(1)微处理器模块:是控制系统的核心,包括微控制器及其相关外围电路主要进行各种信息、数据的处理,协调系统中各功能模块完成预定的任务;
(2)驱动模块:控制机器人系统中的舵机和传感器模块预定的任务;实现舵机速度和位置的控制,完成前进、后退、直行、转弯、避障、抓取等动作;
(3)传感器模块:有速度、位置、距离、声音等传感器,主要负责移动机器人移动过程中的障碍物、声音等检测;
(4)电源模块:负责整个移动机器人的电源供给,使系统能离线运动,主要由12V蓄电池及相关调压稳压电路组成;
(5)串口通信模块:根据RS232通信标准与上位机进行串口通信;
(6)JTAG调试:可以实现在线编程、调试仿真。
3.2机器人的驱动系统
目前,爱机器人的运动控制中较为常见的有直流电机、步进电机和舵机。对于我的课题来说,一个能控制速度的电机作为麦克纳姆轮使用,也需要一个能精确可控制角度且可以保持的电机作为腿部关节使用。经过我初步估计电机转速不是很大,如果使用直流电机,由于转速和力矩的影响,需配置减速器,且不能控制角度。而如果使用步进电机,需配置驱动器。为满足系统的控制要求,考虑到经济性等,我准备采用Dynamixel系列AX-12舵机它是机器人专用的伺服电机。它不但能精确控制角度,作为关节角度控制;也可以通过软件设置为无限旋转模式,作为车轮使用。
3.3AX-12数字舵机概述及特性
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20mS,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。AX-12舵机是一款智能化、模块化的动力装置,主要由一个微处理器、一个精确的直流电机、齿轮减速器、位置传感器、温度传感器以及具备通讯功能的控制芯片等组成,其内部机械结构和电路控制如图4所示:

图4.1舵机内部结构和控制图
AX-12数字舵机作为舵机用时,最大转角为300度,作为电机用时可以自由旋转,应用范围广;采用数字信号控制,控制起来更方便;每个舵机都拥有唯一的ID号,采用网络驱动模式、Daisy总线连接方式,可以多个网状串连控制,连接方便。它的具体参数如表1.1所示。
表1.1舵机具体参数
项目参数项目参数
重量55g位移角度0-300°无限旋转
减速比1/254最小角度0.35°
工作电压7VDC-12VDC通讯半双工异步串行通信
工作温度-5-85摄氏度波特率7343bps-1Mbps
最大电流900mA指令包数字信号
输入电压7V10V物理连接TTL多通道(daisy总线)
最大扭矩12(Kgf?cm)16.5(Kgf?cm)材料工程塑料
转速0.269(秒/60°)0.196(秒/60°)反馈位置、温度、负载、电压等
由于AX-12内部配有一个ATmega8微处理器,用来接收控制器发送的数据包,通过相应的处理后给伺服电机发送PWM信号来控制电机的起停。因此,控制舵机实际上是去控制ATmega8舵机的状态和参数都存储在ATmega8的RAM和EEPROM相应的地址里,对舵机进行控制也就是对舵机的相应地址读和写数据的过程。
5AX-12舵机通信协议
AX-12数字舵机不像一般的R/C伺服电机(舵机)使用PWM控制,它的控制信号为数字信号,主控制器和舵机采用TTL-Daisy总线的连接方式、半双工异步串行通讯协议((8位数据位、1位终止位,无奇偶校验位)。主控制器通过发送和接受数据包的形式来控制舵机,有两种数据包:一个是指令包,这是从主控制器发给舵机的指令;另一个是状态包,这是舵机返回给主控器的。如果主控器向ID为N的舵机发送指令包,则只有该ID的舵机会反馈相应的状态并且执行需要的动作。控制原理图如图5所示:
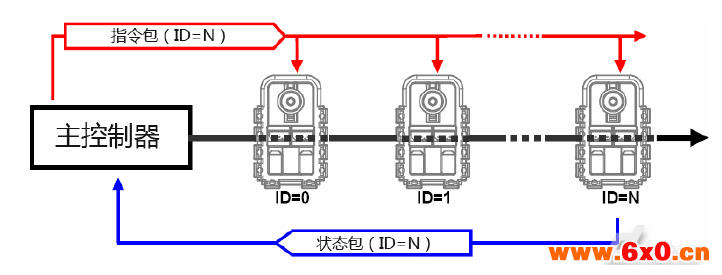
图5舵机控制原理图
6结束语
本文设计了一种轮式移动机器人运动控制系统:即基于伺服控制的移动机器人运动控制系统。本系统采用数控插补技术来跟踪轨迹,具有跟踪精度高等特点。选择了专门用于电机控制的DSP芯片,简化了设计,提高了模块的可靠性,并为今后控制算法的升级留有足够的空间。本文采用的移动机器人规划路径的航迹推算数学模型,它不同于传统的只对直线和圆弧离散,而对一次、二次曲线跟踪路径都可以作离散化处理。运动控制系统采用主从式控制结构,即由主机完成复杂计算,将处理后的数据传递给从机,由从机完成对小车本体的控制,方便地实现了步进电机控制。由从机执行的运动控制器,成本低,功能强,使用方便,而具有十分广阔的应用前景。









 QQ交流群
QQ交流群

