

机器人的智能化经过多年的发展,已越来越贴近人类,使其成为具有人类的学习能力、运动能力、执行能力、感知能力、认知能力等的新型智能机器人是人类追求的目标,其中示教学习是研究机器人学习能力的重要分支之一,是智能型仿人机器人发展和应用的关键。因此,对于示教学习的研究一直是学术界研究的热点。
近年来,为达到机器人能准确、快速的完成人类导师对其示教的动作,出现了许多示教方法,如日本Kondo公司生产的KHR系列机器人,采用直接输入机器人各个关节角度的方式进行示教;美国戴沃尔提出利用伺服技术对机器人的关节进行控制,人手对机器人进行动作示教,机器人记录示教过程中的示教数据并进行再现;曹其新等人则提出了利用激光深度传感器在获得人体各关节转角的三维坐标后,将其输入到控制器中进行示教,并采用基于速度的有选择均值滤波法对控制数据进行处理,以上示教方法在人类对机器人进行示教研究的进程中,做出了重要的贡献,起到了很大的推动作用,但机器人完成示教动作的准确性、重现的速度及传感器数据抖动方面扔有待提高。
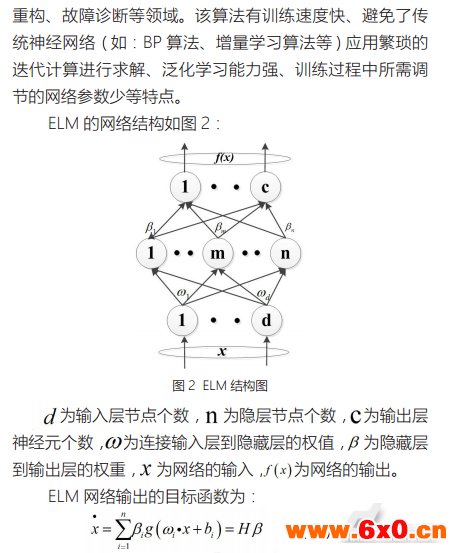
在系统控制策略方面,有许多算法被相继应用于机器人示教领域,如高斯混合模型、强化学习、试错学习等。以上方法在用于系统控制时,虽然表现出了良好的系统稳定性及有效性,但也存在各自的缺点,如训练时间长、生成的轨迹连续性不好等。极限学习机ELM(ExtremeLearningMachine)是针对上述算法的缺陷设计的一种新型算法,其具有泛化学习能力强、训练速度快等方面的优点。
综上所述,为了使机器人示教系统具有很好的自适应性及鲁棒性,即机器人能按照示教动作,在不同起始点上仍按照示教的轨迹回到终点位置,使得机器人具有一定的智能性及自学习能力,并针对上述算法的缺点,本文选用教学研究型机器人NAO为实验平台,采用扳动其手臂关节的方式进行示教,同时构建了以极限学习机为核心算法的机器人示教系统,并通过实验验证了该算法能使系统具有一定的泛化能力。
控制过程概述
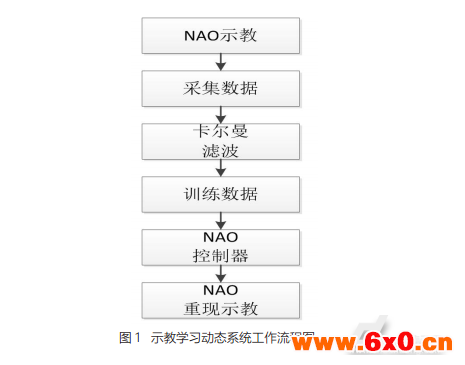
机器人完成点到点的示教动作是研究仿人机器人动作编辑的重要组成部分。故本文将以机器人完成从起始点到目标点的动作为基础动作,以极短的时间间隔作为采样的频率,每次采集时,将NAO右手臂上的四个关节角的值采集到,然后对数据进行预处理,之后进行回归训练,利用训练好的模型对机器人的控制器进行控制,使得机器人重现示教动作更加准确。(如图1)
实验平台简介
法国AldebaranRobotics公司研制的小型仿人机器人NAO,高度为58厘米,全身共有25个自由度,具有动觉、视觉、触觉、感知、认知等能力,其拥有完善的数字处理器及电机制动器、丰富的传感器系统、多种交流设备、特有的操作系统NAOqi、完备的配套编程平台,具备Wi-Fi连接及以太网两种通信方式,因其具备良好的二次开发的优势,被广泛作为教学、科研等方面的研究工具。
示教学习算法
由于传感器测量时存在累积误差、噪声、稳定性等问题,会使测量到的数据不够准确,故使用离散时间的卡尔曼滤波KF(KalmanFilter)来对NAO手臂关节上的传感器输出数据进行融合,使得机器人手臂姿态的准确性最优,有利于提高机器人示教学习的准确性。根据上一时刻关节传感器采集到的测量值对下一时刻的测量值进行估计,然后与下一时刻传感器的测量值进行数据融合,即更正下一时刻的测量值,以便使数据更准确。
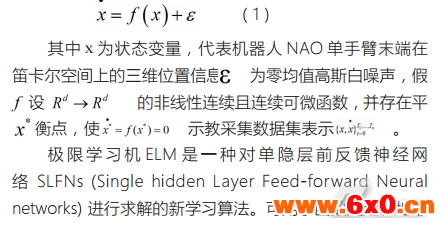
根据机器人实际运动状态,将运动系统定义为一阶常微分方程:

实验
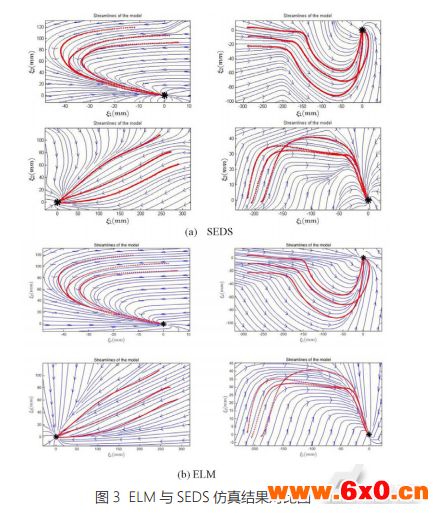
HCS(LearningHumanbyDemonstration)是由Y.OuandY.Xu[12]提出的用于在非线性动态系统中,利用支持向量基为模型学习动态系统的参数,以保证动作能够按照示教动作达到并停止到目标点的一种统计学优化算法。为验证ELM算法具有在上述约束条件下收敛、训练速度快、准确率高等特点,首先将ELM与SEDS在采用相同的样本数据为前提下,将两者的仿真实验结果进行比较。样本数据来源为采集的多种人类实际手写体数据库。以数据库中的Cshape、Spoon、Line、Trapezoid等数据为例,实验对比图如图3所示。
在实验平台上做实际的示教实验,首先由操作者扳动机器人NAO的手臂末端执行器,使其做出要求的避障取物动作,在示教的同时,NAO中的远程控制器,记录下每间隔100ms传感器、关节角等的值,当需要机器人重现示教动作时,动态系统从存储器中取出经ELM算法训练出的控制信息,将指令信号传给驱动机构,使驱动机构准确、快速的完成要求的动作。ELM中,隐藏层节点个数为50,输入层与隐藏层权值均为随机向量,以处理后机器人手臂末端执行器的空间位置数据作为极限学习机的输入,以手臂末端的速度作为其输出。
人类导师示教过程及示教曲线图如图4所示。

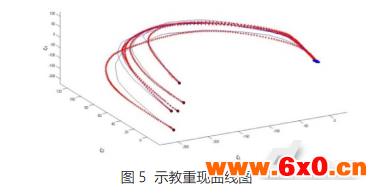
图5为机器人从不同的起始点进行避障示教及重现的轨迹图,黑色点集代表动作起始点,蓝色点集代表动作的终止点,红色曲线为样本数据组成的示教曲线,蓝色曲线为机器人重现示教动作的曲线图。
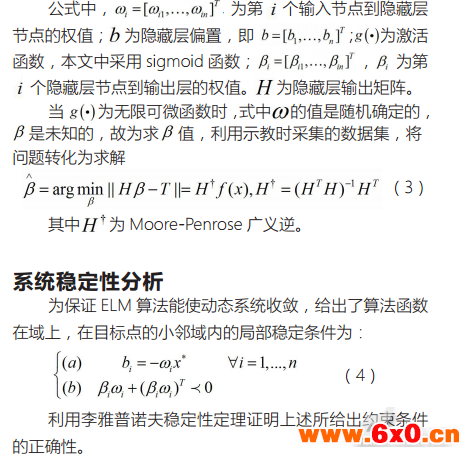
结论
本文结合ELM学习算法的训练速度快、所需调节的参数少等优点,对机器人进行示教学习,弥补了以往仿人机器人示教学习时学习速度慢,重现示教动作精确度不高等方面的不足,实践效果表明,采用该方法有很好的抗干扰能力、很好的泛化能力,同时也避免了维度灾难。采用常微分方程将基于ELM的动态系统描述为非线性动态系统,并给出了该系统在目标点达到局部稳定的约束条件,利用李雅普诺夫稳定性定理对其稳定性给予了理论支撑,为今后仿人机器人学习更多复杂的示教动作奠定基础。
更多资讯请关注传感器频道









 QQ交流群
QQ交流群

