

1、引言
在过去的半个世纪里,人们生产设计了大量的机器人[1]。机器人控制理论的发展有着巨大的进步,如PID控制、滑模控制、自适应控制、模糊控制、神经网络控制等[2-6]。工业机器人的动力学模型具有非线性和各种不确定性,如摩擦、外部扰动和负载变化等,当控制系统的物理模型不确定时,我们很难得到一个良好的性能。因此,如何设计一个机器人控制器是一个严峻的挑战。
在过去的几十年中,滑模控制策略备受关注,因为这种方法通过设计一个适当的状态空间曲面,该表面称作滑动曲面,在此基础上,使用高速的开关控制率,使非线性系统的状态空间轨迹渐近地到达滑动曲面,并且在此后的时间里保持在滑动表面上。滑模控制是一种在控制系统模型不确定条件下控制非线性系统的鲁棒控制方法。是以,它对于系统模型的不确定性和外部扰动具备良好的鲁棒性[7-9]。滑模控制的主要特点如下:(1)快速响应和良好的瞬态性能;(2)对大部分扰动或模型不确定性具有鲁棒性;(3)为一些很难用连续状态反馈法稳定的复杂的非线性系统提供了可能性。但是,因为滑模控制的控制律的不连续性,会引起系统出现不可避免的“抖振”现象,这会对系统造成不良影响。使用边界层的方法,可以消除或减缓抖动现象,但需要权衡系统性能和抖动之间的关系。
本文提出了设计一种自适应控制器的方法来解决抖振问题。关于系统的不确定性,该控制器选用滑模变结构和自适应控制相结合的策略,在滑模控制的基础上,加入自适应算法,通过及时的辨识、学习和调整控制规律,来不断改善系统抖动现象,此方法将被证明跟踪误差可以收敛到零。仿真结果将验证所提出的控制策略是否可以有效的高性能的进行轨迹跟踪控制。
2、问题的描述
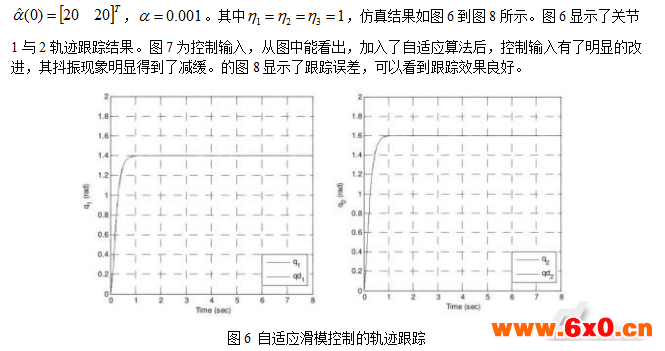
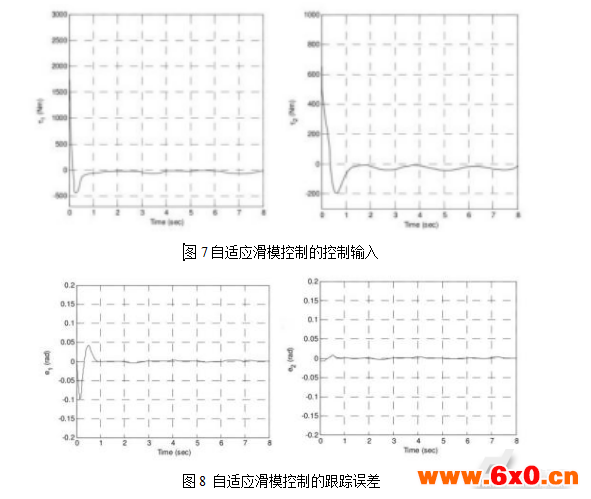
6、结论
本文提出了一个简单且有效的自适应滑模复合控制的策略,使用李雅普诺夫定理验证了其稳定性,保证了鲁棒性和跟踪性能。设计的自适应律可以及时的在线辨识系统参数,有效减缓了控制输入的抖动。经过理论分析与系统仿真证明了此控制策略能够保证全局稳定性,实现良好的跟踪效果。
更多资讯请关注工业机器人频道








 QQ交流群
QQ交流群

