

引言
机械手臂作为自动化设备中的一个重要组成部分,以其操作灵活性,被广泛应用于工业生产、医疗服务、军事科技等各个方面。对于不同的工作工作环境,我们要对机械手臂的各个关节进行具体的轨迹规划,从而得到机械手臂末端的位姿,因此,对机械手臂进行精确快速的轨迹规划就显得尤为重要。机械手臂关节空间的轨迹跟踪就是通过控制各关节的位置、速度、加速度等变量使机械手臂沿期望轨迹运动。
3.实验研究
3.1实验平台及模型建立
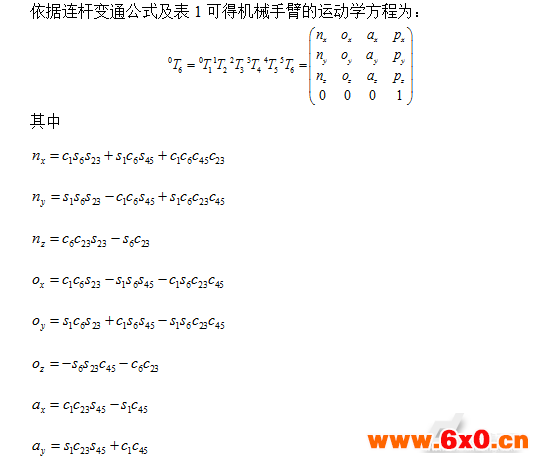
本文的研究对象CytonII型机械手臂是具有六个转动关节的六自由度机械手臂。其三维模型如图1所示。根据D-H法建立的坐标系图如图2所示。

图1 CytonII型机械手臂的三维模型
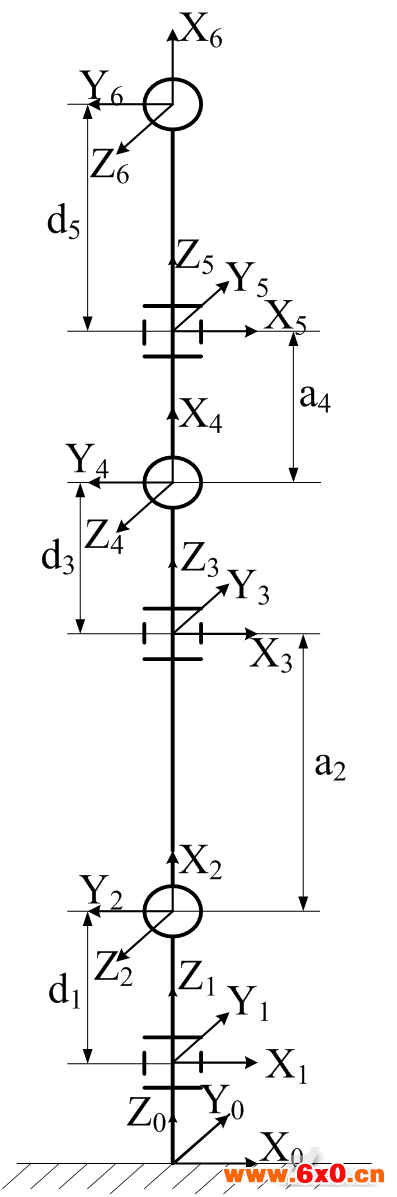
图2 机械手臂坐标系示意图
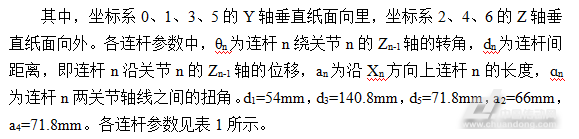
表1机械手臂连杆参数表
| 连杆 | 转角变量θn | 连杆 间距dn | 连杆长度an | 连杆扭角ɑn |
| 连杆1 | θ1 | d1 | 0 | 0° |
| 连杆2 | θ2 | 0 | a2 | 90° |
| 连杆3 | θ3 | d3 | 0 | 0° |
| 连杆4 | θ4 | 0 | a4 | 90° |
| 连杆5 | θ5 | d5 | 0 | 0° |
| 连杆6 | θ6 | 0 | 0 | 90° |
3.2遗传算法应用步骤
(1)输入一组型值点作为初始值,其中包括机械手臂的起始点和终止点,要求经过的路径点的坐标。
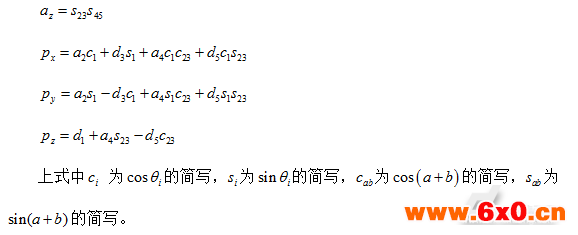
(2)定义适应度函数
本文采用四次Bezier曲线拟合随机产生N个控制点,同时按照给定型值点的数目产生N-2个节点向量,用于分析误差。控制顶点的数量若无指定一般为四个,本文采用最小二乘法计算误差,即逼近曲线的节点和用户指定型值点之间的距离最小。由m个Bezier曲线节点坐标和实际跟踪曲线的积累误差产生的距离为
(3)确定操作策略和种群规模M、交叉概率Pc、变异概率Pm,本文中Pc=0.5,Pm=0.1。
(4)产生初始群体,计算初始种群的个体适应度,并对适应度进行统计,保留最优解。
(5)对适应度高的个体运用交叉、变异等方法进行重组,产生新的种群。
(6)返回步骤(4)对新种群计算个体适应度。
(7)若计算种群适应度函数收敛,则停止遗传,否则继续产生新的种群,预计最大进化代数Tmax=100。
(8)利用Matlab绘制实验结果。
3.3仿真实验
当机械手臂末端在直角坐标空间中从一点运动到另一点时,由已知的起始点,终止点以及轨迹经过的中间点,通过机械手臂运动学逆解可求出各关节的型值点。本文中各型值点的坐标如下表2所示。
表2节点的数值表
| 节点(rad) | 关节1 | 关节2 | 关节3 | 关节4 | 关节5 | 关节6 | |
| 1 | -0.4488 | -0.6283 | 1.0472 | -1.5708 | 0.5236 | 0.7854 | |
| 2 | -0.4360 | -0.6185 | 1.0421 | -1.5540 | 0.5124 | 0.7652 | |
| 3 | -0.3622 | -0.5616 | 1.0125 | -1.4571 | 0.4478 | 0.6489 | |
| 4 | -0.2048 | -0.4405 | 0.9496 | -1.2506 | 0.3101 | 0.4011 | |
| 5 | 0.0261 | -0.2627 | 0.8572 | -0.9475 | 0.1081 | 0.0374 | |
| 6 7 | 0.2992 0.5723 | -0.0524 0.1579 | 0.7480 0.6388 | -0.5890 -0.2306 | -0.1309 -0.3699 | -0.3927 -0.8228 | |
| 8 9 10 11 | 0.8032 0.9605 1.0344 1.0472 | 0.3357 0.4569 0.5137 0.5236 | 0.5464 0.4835 0.4539 0.4488 | 0.0725 0.2790 0.3759 0.3927 | -0.5719 -0.7096 -0.7742 -0.7854 | -1.1865 -1.4343 -1.5506 -1.5708 | |
图3~图8分别是机械手臂六个关节的位移,角速度以及角加速度仿真曲线。从仿真结果可以看出,采用本文提出的方法能够使机械手臂运行稳定,轨迹路径平滑连续。
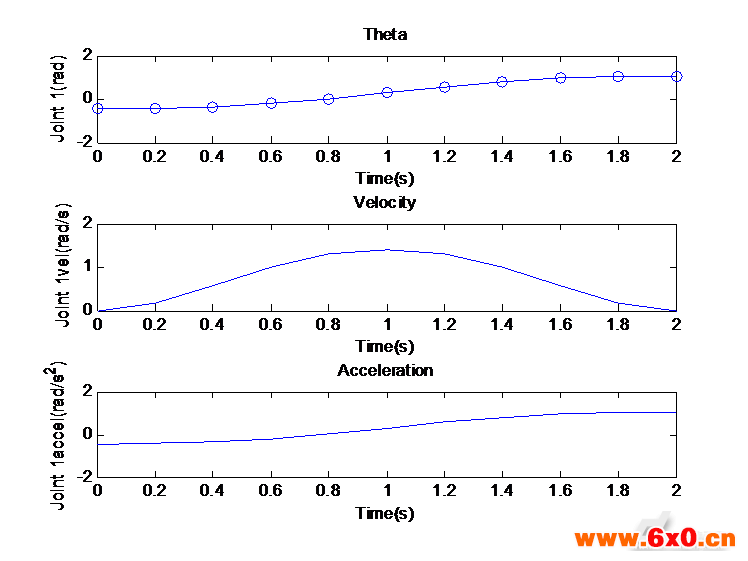
图3关节1的角位移,角速度,角加速度曲线
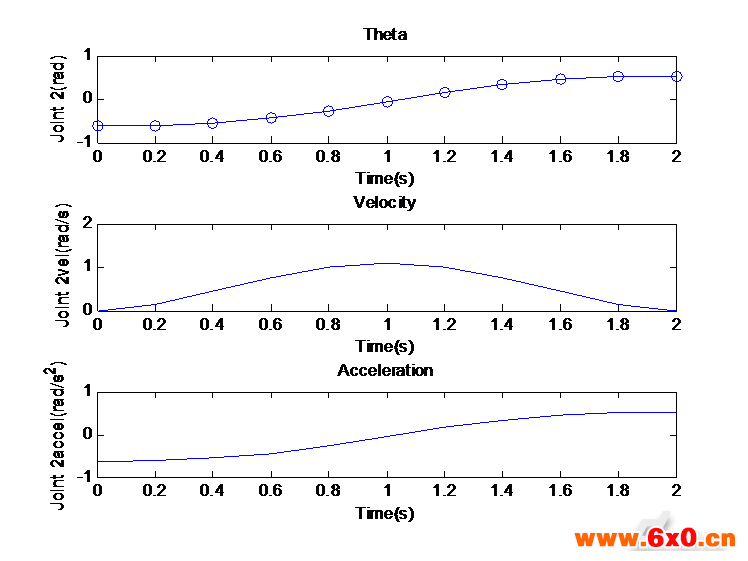
图4关节2的角位移,角速度,角加速度曲线
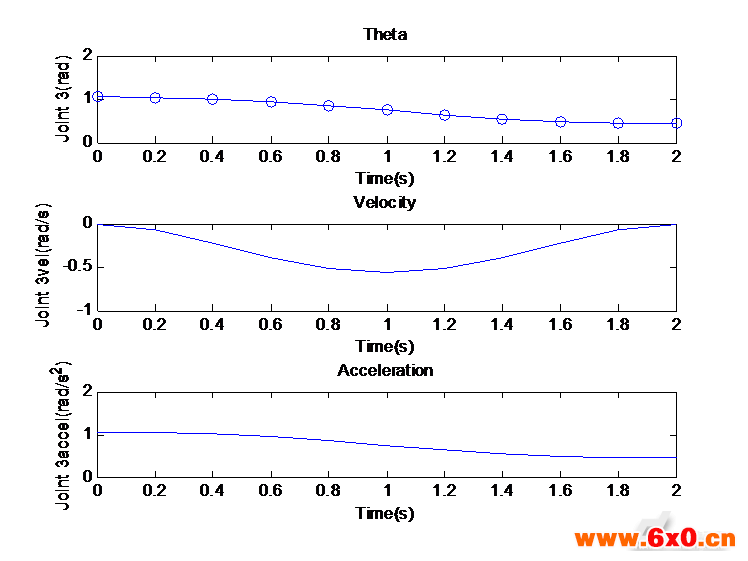
图5关节3的角位移,角速度,角加速度曲线
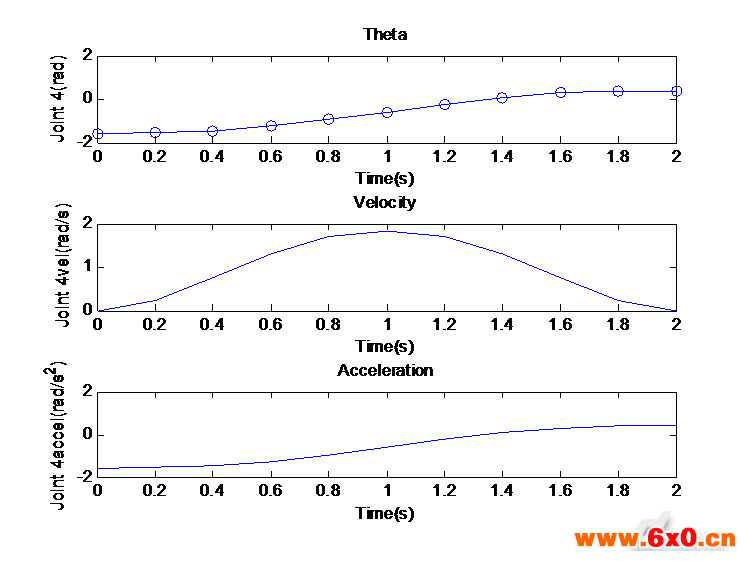
图6关节4的角位移,角速度,角加速度曲线
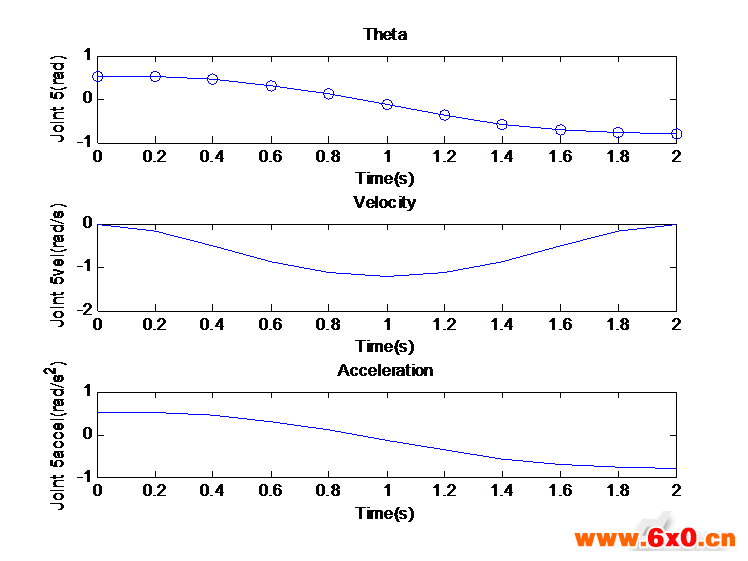
图7关节5的角位移,角速度,角加速度曲线
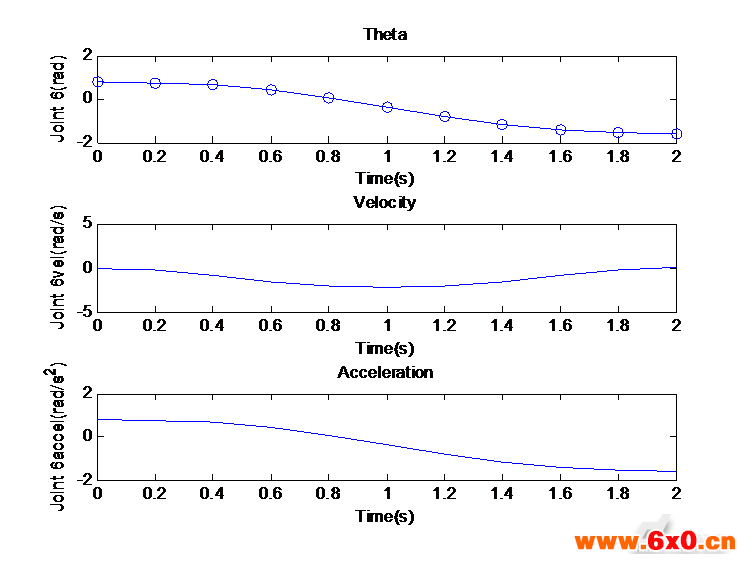
图8关节6的角位移,角速度,角加速度曲线
4.结语
本文研究的轨迹规划方法主要是利用Bezier曲线对基于关节空间的机械手臂运动轨迹进行逼近,同时利用遗传算法具有全局性,并行性等特点针对机械手臂要求运行平稳,反应及时等特点对轨迹规划进行了优化,通过实验测试表明,经过遗传算法优化对关节空间的轨迹规划,不仅使轨迹平滑连续,而且提高了机械手臂运行的稳定性。
更多资讯请关注工业机器人频道








 QQ交流群
QQ交流群

