

引言
机器人足球的最初想法由UniversityofBritishColumbia,Canada的AlanMackworth教授于1992年正式提出。他在OnSeeingRobots一文中以机器人足球为例,指出传统的机器人研究中存在的不足:DefiniteKnowledge,CompleteKnowledge,StaticEnvironment,DeterministicWorld,DiscreteSequentialActions...。随后,众多学者和科技人员对机器人足球的可行性及技术问题进行了研究。在一些实验室或研究所之间也相继开展了小型的比赛。
机器人足球是一个综合性的项目,它涉及众多的传统理论和前沿技术。机器人制造本身就集合了结构工程、电子电路、精密机械、仿生材料等多种技术,而计算机、自动控制、传感、无线通讯等技术则是机器人能够运动和踢球所不可缺少的,多个机器人之间的配合更是涉及比较复杂的关于多主体的协调、合作与策略等问题。在第15届国际人工智能联合大会上,由Kitano,Veloso和Tambe等来自美、日、瑞典的9位国际著名或知名学者联合发表重要论文"TheRoboCupsyntheticagentchallenge97",系统阐述了机器人足球的研究意义、目标、阶段设想、近期主要内容和评价原则。概括的说,过去50年中人工智能研究的主要问题是“单主体静态可预测环境中的问题求解”,其标准问题是国际象棋人-机对抗赛;未来50年中,人工智能的主要问题是“多主体动态不可预测环境中的问题求解”,其标准问题是足球的机-机对抗赛和人-机对抗赛。由此可见机器人足球具有重要的意义。
运动控制器是移动机器人的执行机构,对机器人的平稳运行起着重要作用。随着新的智能控制算法的不断涌现,移动机器人正向着智能化方向发展,这就对运动控制系统性能提出了更高的要求。设计实现智能移动机器人的控制系统,能够熟悉移动机器人硬件和软件的开发,掌握移动机器人的运动控制特性,为后续的移动机器人的功能扩展搭建一个可行、稳定的平台,而这个平台则可以作为多种机器人开发的公共基础平台。实现智能移动机器人控制系统的开发具有一定的现实意义,将为以后的移动机器人开发奠定坚实的基础。
1、足球机器人的系统原理组成
RoboCup中型组比赛是由两支各有多个自主式足球机器人的球队在标准场地进行的比赛,自主式足球机器人系统如图1所示,场上的每个机器人都具有完全的自主能力,自身具有独立的传感器系统、决策系统以及执行机构,机器人将各自搜集到的信息同本队的其它自主机器人沟通,通过机器人本体或场外监控站上数据融合得到所需的信息,然后根据这些信息进行决策,并执行相应的动作。
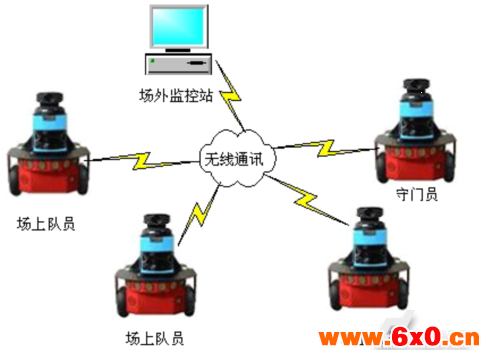
图1自主式足球机器人系统
足球机器人系统分为下面几个部分:
1)机器人小车子系统
2)视觉子系统
3)无线通讯子系统
4)机器人控制子系统
5)决策子系统
上述五个子系统构成了大的闭环系统,如图2所示。决策系统的指令通过无线通讯系统发送给机器人小车系统,控制子系统根据指令控制机器人相应的运动,再由视觉子系统采集场地信息,反馈给决策系统,完成闭环控制。
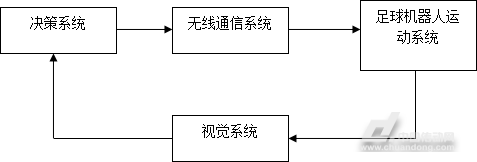
图2足球机器人系统组成原理图
机器人小车子系统是比赛的本体部分,其性能的好坏直接关系到比赛的结果。它设计的关键在于机器人的软硬件设计。
视觉子系统是整个比赛的最终检测反馈机构,它扮演机器人的“眼睛”。它的主要任务是利用摄像头实时采集比赛场地上的图像信息,通过图像卡处理并且辨别这些图像,得到场地上运动物体(包括双方8个机器人和球)的相关数据,主要是每个机器人的横坐标X、纵坐标Y和其方向角度,并且将这些数据传给主机,以供主机上的决策系统进行分析决策使用。
无线通讯子系统的作用主要是完成决策指令的传输,将决策系统的结果发送给各个机器人,使其执行相关的动作。
决策系统上接视觉子系统,下连通讯子系统,是整个智能系统的中心枢纽,是系统的“大脑”,它主要功能是根据图像系统提供的一系列的场景信息与及各种传感器信息,对本方机器人的运动做出最佳的决策,同时将机器人的运动指令通过无线通讯系统传给机器人。它的优劣关系到机器人的智能化水平以及比赛的成败。
控制系统是决策系统和机器人本体之间的联接部分,它是机器人运动的核心处理部分,如果决策系统是教练,那控制系统就是队员的本领,它的好坏关系到机器人体现决策系统指令的好坏。它的作用就是根据一定的算法来解析决策系统的指令将它转化为具体的机器人的运动指令,并且控制机器人实现相应运动。
2、足球机器人控制电路系统结构
RoboCup小型组足球机器人在场上是实时、高速、高对抗的.为了满足比赛要求,足球机器人控制电路系统必须具备以下功能:
(1)MCU运算速度高,能够执行运算量大的控制算法,方便扩展各种接口电路;
(2)能配合无线通讯模块实现波特率115200bps的无线信号接收;
(3)能够以脉宽调制的方式驱动四路驱动轮电机;
(4)可以处理四路以上的正交码盘信号、检测各驱动电机电枢电流信号盘来实时地对四组驱动轮进行精确的闭环速度控制;
(5)对机器人供电电池组进行DC-DC升压变换至200v,用以驱动“踢球”电磁铁高速击出“球”;
(6)使用多路红外传感器和加速度计来感知机器人状态。
通过对足球电路系统功能和性能特点的分析,综合足球机器人体积和电源等方面的要求,我们将电路系统各种功能大胆融合、进行优化,提出本文所述的设计方案。
电路系统是作为整体进行设计和优化的,可划分为以下几个功能模块:
①MCU模块。该模块的核心为采用主从工作模式的双DSP。MCU模块可配合无线通讯模块接收上位机(PC)发送的无线通讯信号,根据接收到的指令和自身传感器信息完成对机器人的实时控制。
②驱动电路模块。该模块在MCU模块的控制下,以脉宽调制的方式对机器人驱动电机进行实时调速控制。
③DC-DC升压电路模块。足球机器人使用可充电镍氢电池组供电,电源变换模块将电压升高到DC200v,储存到大容量的电容中,作为击球电磁铁的电源。
④传感器电路模块。该模块使用红外发光管和红外接收管来探测机器人是否带到球以及周围障碍物与机器人的距离。
足球机器人电路系统构成框图如图3所示:

图3足球机器人电路系统框图
3、MCU模块设计
机器人控制MCU需要完成机器人速度轨迹跟随控制算法,还需要接收指令、处理多路传感器信号等。由于这些处理所需要的运算量相对比较庞大,而且需要使用大量的控制接口,所以一些传统的简单运算芯片(如8051等)和单片机无法满足我们的需求,我们采用运算能力相对强大的DSP芯片。
系统采用TI的DSP芯片TMS320LF2407A,它属于TI工公司DSP中专门用于电机控制的TMS320LF240X系列中的一种。它是TI在以TMS320C2xLP系列为内部运算核心的基础上,整和了丰富的外围控制电路和接口而形成的一类面向电机控制特殊片种。它具有以下一些优点:运算速度快、运算精度高;体积小、功耗低;指令系统功能强大、高效;存储空间大、扩展简便;片内“外设”丰富、接口简单;带有多个事件管理器方便对电机进行控制。TMS320LF2407A的具体参数为:最高内部频率为40MHz,时钟周期为25ns,具有40MIPS的处理能力;
32K内部FLASH为,可加密;两个事件管理器(EventManagers),每个EM包括:两个16位时钟;8个通道的脉宽调制(PWM)单元;三个事件捕获单元(Cap);
10位A/D转换器,16通道,375-500ns的转换时间;CAN2.0、异步串行口(SCI)、同步串行口(SPI);40个管脚可用作通用10。
4、DC-DC升压电路模块设计
机器人在比赛中需要“踢球”,也就是将一个重量为46克的高尔夫球击出,所以需要设计一个击球系统,并要求将球击出的初速度最高达到5m/s并能够控制。经过分析和实验,使用200v以上的直流电压来驱动电磁铁可以使得机器人“踢球”的最大速度达到5m/s。这就需要设计DC-DC升压电路将10v的机器人电池电压变换成200v以上。
利用开关电源的原理,设计升压电路如图4所示:
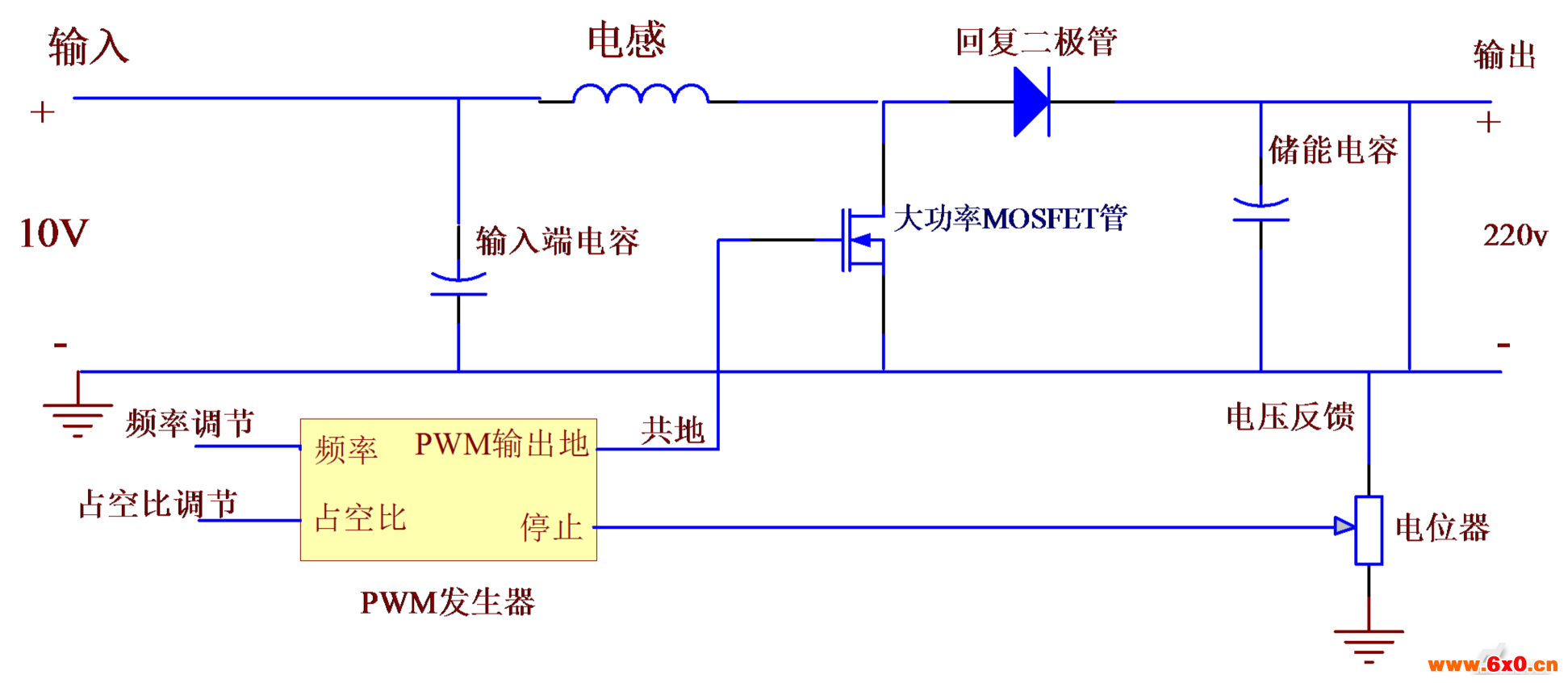
图4DC-DC升压电路模块原理图
大功率MOS管是一个电子开关,PWM发电器发出的PWM波控制它的导通和关断。
当MOS管导通时,电源与电感组成一个回路。此过程中,回路电流线性上升,电源将能量储存到电感线圈中。当MOS管关断时,电源电感与储能电容组成回路。此过程中,电感会因为电流下降而产生感应电压,该电压与电源电压叠加给储能电容冲电。这样储能电容两端就可以得到远高于电源电压的电压。
PWM发生器发出的PWM波控制MOS管以3.6KHz高速地导通和关断,该升压电路就能不断的给储能电容充电。当储能电容中的电压达到我们预先设定的电压时,PWM发生器停止工作,充电电路停止给储能电容充电。如果储能电容因为驱动电磁铁等原因造成电压下降,就会触发PWM发生器。PWM发生器将重新开始工作,给储能电容充电。通过这样的过程,就可以把储能电容中的电压维持在设定的电压上。
5、软件设计
机器人的控制系统采用双DSP的形式,降低了硬件系统的复杂度。但是,同时主、从DSP之间的耦合度较高,主、从DSP之间需要进行大量的数据交换、管理、及握手信号。这样就给DSP内的软件提出了要求。下面来介绍在主、从DSP的软件设计,说明是如何实现各种功能的。
足球机器人的速度轨迹控制是一个重要的研究对象,因此需要执行速度轨迹控制算法的DSP中的程序能够很方便的改变。主DSP对从DSP进行管理,上位机可以通过发送控制指令给主DSP,由主DSP来管理从DSP的控制算法程序。这样从DSP上的控制程序的执行就有了更大的灵活性。
无线模块接收的指令经过主DSP的接收和校验后,通过SCI发送从DSP。从DSP需要主DSP读取两组正交码盘信号的时候,主DSP也是通过SCI发送给从DSP的。也就是说经过校验的指令和码盘信号都是通过同一个通道传送的。因而需要采用一定的机制来解决。实际设计中,使用了两个I/O作为握手信号,主DSP根据握手信号发送不同的数据。两组数据都是通过封装好的“帧”的形式发送的,它们具有不同的数据头,从DSP通过数据头来判断接收的是指令还是码盘信号,从而将接受到的数据存储到不同的寄存器中。两个I/O可以表示四组状态,握手信号状态表如表1所示:
表1SCI传输握手信号状态表
| I/0 1 | I/0 2 | 状态 |
| 1 | 1 | 无效 |
| 1 | 0 | 发送码盘信号 |
| 0 | 1 | 发送指令信号 |
| 0 | 0 | 无效 |
SCI接口波特率为115200bps;数据格式为:1bit起始位,8bit数据位,1bit停止位,无奇偶校验。
下图为系统的主、从MCU的软件流程图。
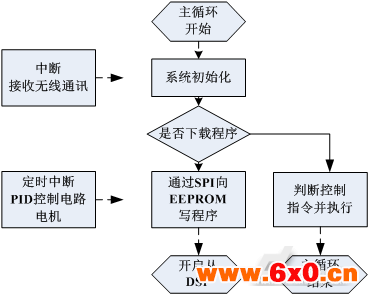
图5主、从MCU软件流程图
6、结论
本文将研究工作集中在了机器人的运动控制算法和控制电路系统设计方面。在运动控制研究方面。针对四轮全向足球机器人组成的球队,本文提出了适用的运动控制模式和运动控制算法。该模式将运动控制分为两个主要环节:速度轨迹生成和速度轨迹跟随。针对机器人控制算法要求,作者设计了以主一从式双DSP为核心的控制电路设计方案。改方案能有效的简化电路设计,增加可靠性,降低成本。
更多资讯请关注运动控制频道








 QQ交流群
QQ交流群

