

前言
随车吊可以应用于导弹武器装备运输、导弹半自动填装系统、危险环境救援和果树农产品喷洒农药采摘等。在应用到导弹武器装备中时,导弹武器从生产到作战训练和战场运用都需要运输手段,运输方式包括船舶运输、车辆运输和人员携带等;而装备可靠性与装备运输性能的优劣有着紧密联系,运输环境影响导弹装备性能。在应用到导弹半自动填装系统中时,填装系统的功能是把准备发射的导弹填装到发射架上,填装装置主要是由一台能把导弹装到发射架或从发射架卸下来,为了代替操作手人工把导弹装到发射架上并使导弹自动进入发射架上的准确位置,先把要填装的导弹运送到与发射架相对应的位置上,然后通过一个简单的旋转动作,便可将导弹单个或同时装到相应的发射上。应用在救援机器人方面,面对越来越复杂和危险的救援对策和世界范围内频繁的人为和自然灾难,机器人协助甚至代替人类参与救援工作成为当今救援的重要议题与手段。机器人在农业方面的应用,可以大大降低劳动程度,提高劳动生产率,解决劳动力不足的难题,现代的农业机器人是检测技术、传感技术、人工智能技术、图形识别技术和通讯技术等多种技术集合于一身的机器。
我国在20世纪70、80年代才开始研究随车吊系统,由于起步较晚,国内随车吊机械臂的研究与发达国家还有较大差距。在王天然院士组织领导下七家合作单位经过不懈努力研究出液压驱动救援随车吊机械臂,这七家合作单位分别是浙江大学、北京航空航天大学、大连理工大学、西北工业大学、机械科学研究总院等。液压驱动救援随车吊机械臂具有如下特点:一是油、电“双动力”交替驱动,二是双臂手作业,轮履复合行进,三是双臂末端的机械手可根据作业或救援现场需要而快速更换不同作业功能,这样可使液压驱动救援随车吊机械臂快速地完成装卸、拆解、抢险救援作业,
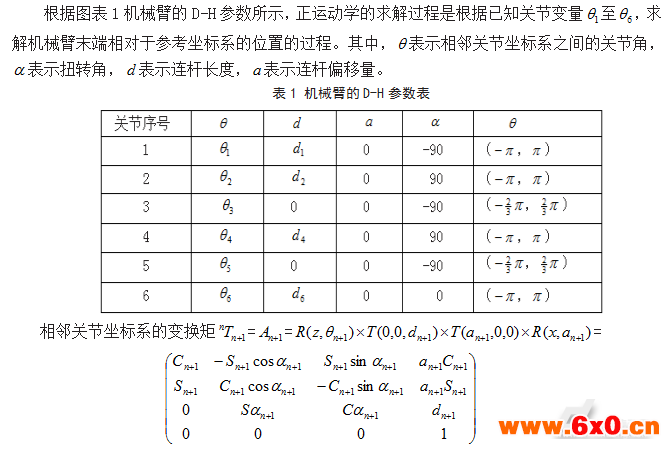
随车吊机械臂的运动学模型是结构分析的基础,它不仅便于分析机构的速度和加速度,也为研究动力学相关问题提供了便利。常见的方法为D-H参数表示法和齐次变换矩阵法。该方法的优点是利用它便于进行雅可比矩阵的计算和力分析等,但它在技术上仍存在着根本问题是:针对仅在x和z轴运动的机械臂,可以进行完整描述,而涉及到关于y轴的运动形式就不再适用。然而,随车吊机械臂自动转载系统的机械机构比较复杂,多存在回转、旋转、拉伸等多个关节,这将给D-H参数法在关节坐标的设定带来很多麻烦,采用齐次变换旋转矩阵法对室外作业的液压随车吊机械臂系统进行运动学建模,其方法简单,且效果直观。
1、数学模型建立
本文首先要建立一个坐标系,而坐标系的建立就应用Denavit-HartenBerg法(D-H法),再根据D-H法所建立的坐标系推导机械臂的运动方程。D-H法是一种建立相对位姿的矩阵方法,在1995年Denavit和HartenBerg提出了这种方法并以他们两人的名字命名为D-H法。D-H法利用齐次变换描述了各个连杆相对于固定参考系的空间几何关系,相邻两连杆的空间关系用一个4*4的齐次变换矩阵来描述的,从而可以推导出末端执行器的坐标系相对于基坐标系的坐标变换矩阵,建立操作臂的运动方程。
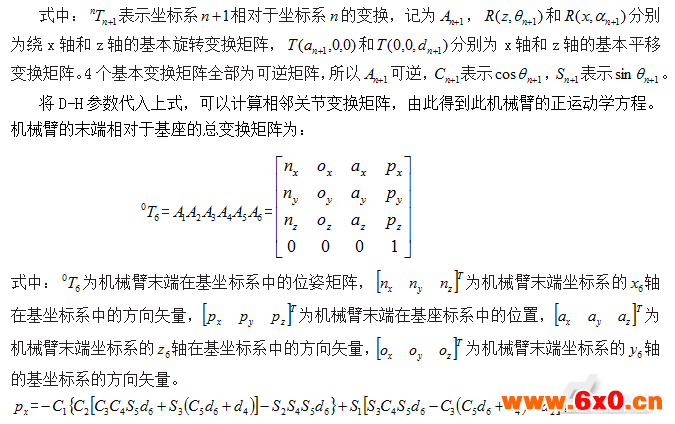
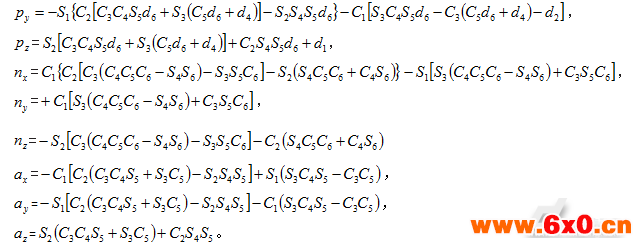
若要求解机械臂正运动学必须要已经知道机械臂各关节角度,再根据机械臂各关节角度求取机械臂末端执行器的期望位姿,机械臂运动学问题研究的标准方法是利用D-H法进行分析建模,其基本思想是:首先要建立参考坐标系,参考坐标系要在机械臂各个关节处建立;其次确定任意2个相邻坐标系之间的转换矩阵,将得到的矩阵依次相乘;最后得出基座至末端执行器的总变换矩阵。

图1六自由度模块化机械臂
可以把机械臂看作是用关节连接起来的连杆构成的,根据此机械臂的结构特点,使用D-H法建立基坐标系和各个关节坐标系,六自由度机械臂是一种空间机构,这种空间机构具有六个关节。只有在每个关节处建立坐标系,才能够描述机械臂末端在空间的姿态和位置。
2、MATLAB简介
MATLAB是一种高级技术计算语言,MATLAB在数据可视化、算法开发、数值计算以及数据分析方面发挥重要作用。MATLAB具有绘制函数和数据图像、运算矩阵、用C语言和C++等编程语言编写程序、创建用户界面等功能。MATLAB最大的得色是在数值计算方面。Matlab的绘制函数、矩阵运算和创建用户界面、连接其他编程语言等功能可以完成图像处理、工程计算、控制设计、信号检测等要求。矩阵是MATLAB的基本数据单位,工程、数学中所用到的形式与其指令表达式很相像,正因为这样,与C和FORTRAN等语言相比用MATLAB来解决问题要简单简捷得多。MATLAB优势特点
1)实现计算编程和结果的可视化,具有完备的图形处理功能;
2)为了方便用户,建立了像通信工具箱、信号处理工具箱等丰富的应用工具箱;
3)符号计算及数值计算功能强大,能够避免繁杂的数学运算分析;
4)数学表达式及用户界面的自然化语言,更方便学习和掌握。
可以说MATLAB是一个集合,这些集合可以让用户所需要的计算功能全部都实现,集合包含超过六百个工程和科研中所要用到的计算算法。在计算要求一样的情形下,用其它方法编程比MATLAB的编程的工作量会增加很多。MATLAB所拥有的这些函数集(例如特征向量、矩阵的复杂函数、傅立叶变换)能够解决工程中很多计算问题(例如工程中的优化问题、微分方程及偏微分方程的组的求解、傅立叶变换和数据的统计分析等)。
在图形处理方面,MATLAB有了很大的进步和发展,MATLAB不但对二维曲线和三维曲面的处理和绘制等一般软件都具有的功能有所补充,而且对于图形的色度处理、四维数据以及光照处理的这些其他软件所没有的功能表现出了出色的处理能力。MATLAB还具有数据可视化功能,这项从开发时就拥有的功能可以方便用户使用,数据可视化功能能够以图形的形式将矩阵和向量表达出来。高层次的作图包括二维和三维的图象处理、可视化、表达式和动画作图可用于工程绘图和科学计算,MATLAB也针对不同层次的用户对类似图形对话等特殊要求设计出来相应的功能函数。
3、运动学仿真
对机械臂进行运动学仿真,为了使机械臂运动的状况能够更立体直观可以用图形的方式把机械臂仿真结果表示出来,即机械臂能否满足空间操作要求,动作是否连贯和有无干涉现象。用数据曲线或数据本身与用图形的方式进行仿真相比,用图形的方式可以分析出大量的重要信息,而用数据曲线或数据本身仿真则无法看出机器人的运动规律。
3.1正运动学的验证
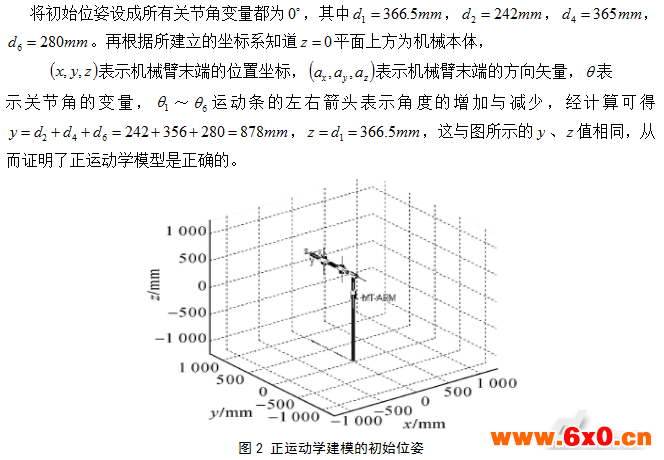
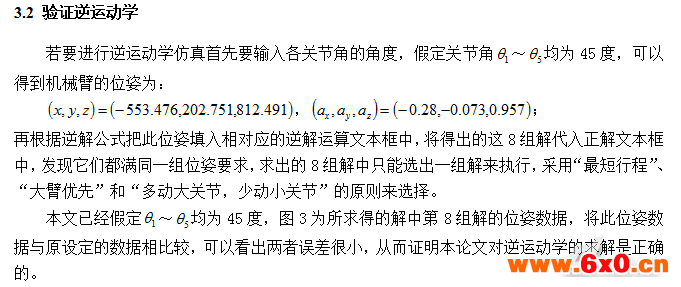
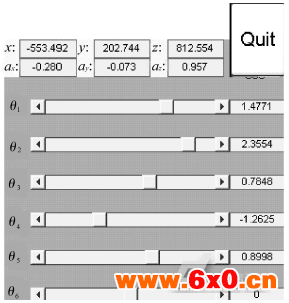
图3第八组机械臂的末端位姿
3.3差值规划结果
以下是用插值法规划的垂直抓取轨迹,本论文对空间曲线轨迹、速度和加速度都做了仿真,如图4、图5、图6
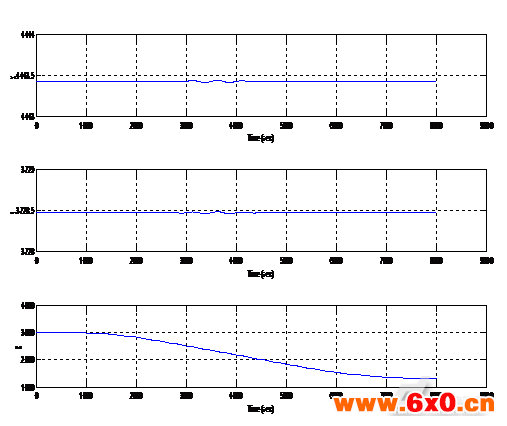
图4各坐标轴曲线
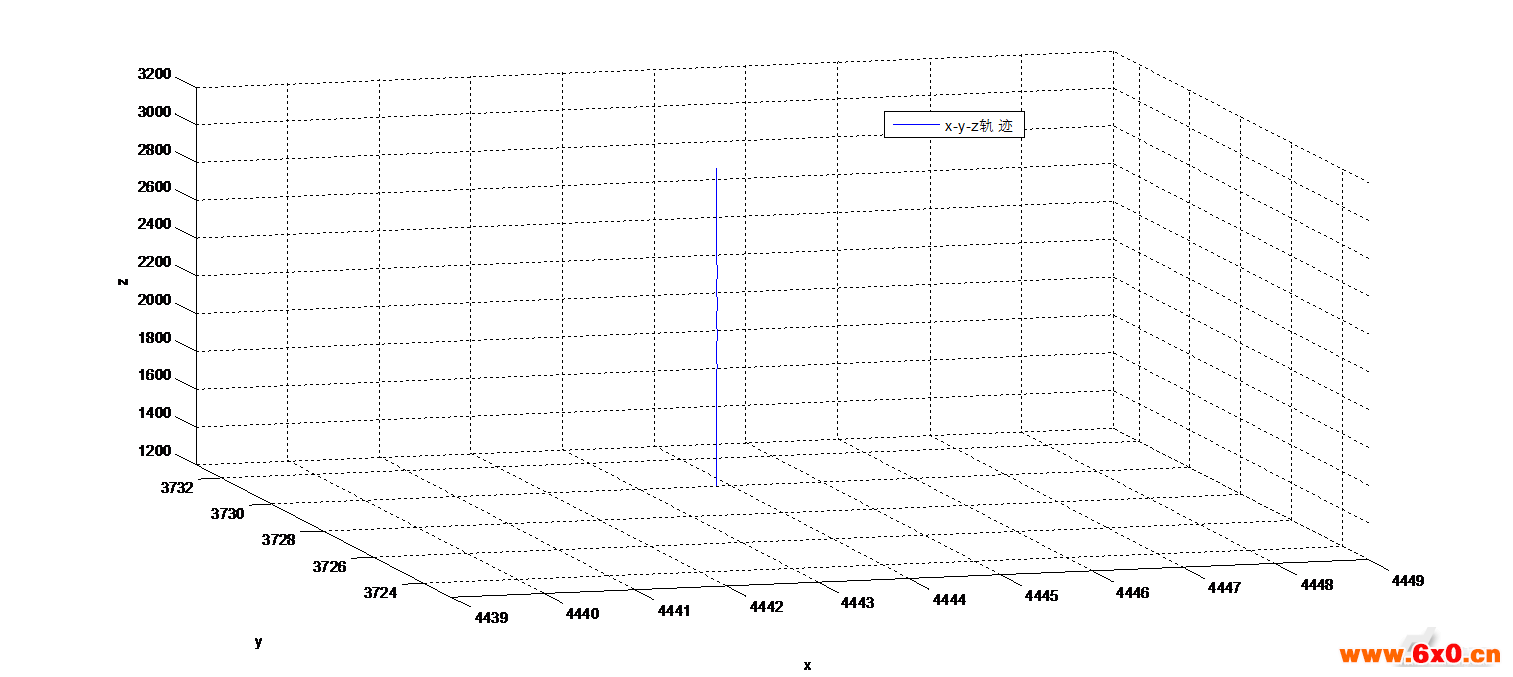
图5空间曲线轨迹
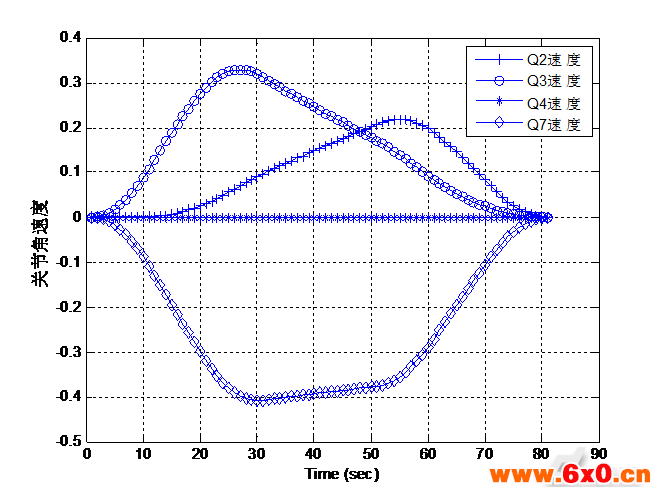
图6关节速度曲线
4、结论
运用D-H法建立坐标系进行随车吊正运动学分析,求解机械臂的D-H参数;根据随车吊机械臂末端的坐标位置和随车吊机械臂的运动学正解可以推得16组运动学逆解;本论文还运用插值法对随车吊机械臂的轨迹进行规划,用笛卡尔空间轨迹规划法把运动学分为七个阶段,对匀速阶段和变加速阶段分别进行求解;本论文最后对正、逆运动学进行仿真,设定杆的长度、假定关节度数从而得出八组解,将这八组解与原定的数据相比较发现两者数组相近,这充分证明了逆运动学的求解是正确的。
更多资讯请关注工业机器人频道








 QQ交流群
QQ交流群

