

电-机械转换器是电液比例控制元件的关键驱动元件,它可将外界输入的电压信号连续成比例地转换成往复直线位移,可以产生同尺寸结构2.5倍的电磁力,并因其高线性和小滞环特性而受到广泛关注。
传统结构的线圈组件在运动过程中,磁性材料内部易产生涡流,使线圈产生的电磁力减小。同时由于线圈组件固有特性的限制,导致其无论是在响应时间还是在响应速度上都不是很快。开发高响应和大推力的电-机械转换器,是电液比例控制技术的发展趋势。国内外很多学者和研究机构都对此进行了研究。本文针对载流线圈,采用新型线圈分割并以串并联组合方式进行对比分析,通过改变电阻及时间常数以减少线圈两端的加载响应时间,可以大大提升动圈式电-机械转换器响应特性和输出电磁力。
结构与原理
拟研究的动圈式电-机械转换器主要由永磁铁、载流线圈、推力线圈骨架、衔铁、壳体、导向销、保护盖和输出轴等组成,具体见图1。壳体内壁圆周上固连有若干片环形分布的瓦型永磁体,衔铁位于环形分布的永磁体内,且与壳体的一端用螺钉固连。载流线圈缠绕在推力线圈骨架上,并与输出轴相连,通过一导向销,浮动于永磁体与衔铁之间的气隙内,并通过密封碗与外界隔开。
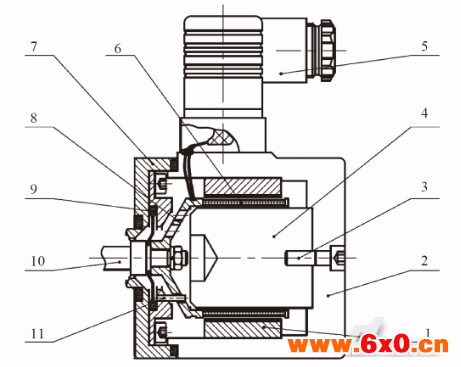
1-永磁体;2-壳体;3-螺钉;4-衔铁;5-接线端;6-线圈;
7-保护盖;8-线圈骨架;9-密封碗;10-输出轴;11-导向销
图1动圈式直线电机结构图
控制原理如图2所示,输入信号电压ui经放大器处理后,加载到控制线圈,连同推力线圈骨架在永磁体提供的恒定磁场中,受电磁力Fcd作用而产生位移xc,从而带动输出轴一起运动。动圈组件由位移传感器检测位置误差,然后转换成信号电压,补偿到输入信号ui,作为纠偏电压ue,以保证动圈组件保持在所需要的正确位置。电磁力的大小和方向,取决于线圈中控制电流i的大小和方向。
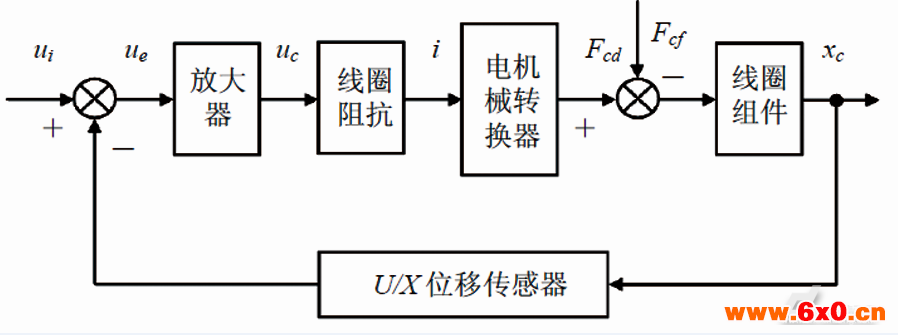
图2电-机械转换器控制原理
线圈组设计
目前常用的线圈绕线方式为单线圈式,响应速度及电磁推力提升有限,难以满足现节能环保和高效快速的要求。文中将原线圈平均分为多段,构成并联线圈组件,可大大减少线圈能耗,而且能满足大输出力和高频响应性的要求。
在单线圈输入电流I不变的情况下,电磁铁的响应时间t:
t=-T1n(1-RI/U) (1)
其中,I为电流(A);U为电压(V);R为线圈电阻(Ω);L为线圈电感(H);T=L/R为时间常数(s)。
由于输入电压一定时,线圈的电阻、电感影响整个电路的时间常数和电流大小,因此只要改变电阻和电感大小就可以实现电-机械转换器的输出力及响应时间。
通过分析线圈尺寸和线圈阻抗之间的关系,可知线圈电感与电机线圈(绕线部分)长度、直径及线圈匝数的平方成正比。为了达到高响应,在设计时必须降低线圈电感。
电感量Li表示线圈本身固有特性,与电流大小无关,其表达式如下:
Li=CiN2Dix10-3 (2)
其中,Ci为系数,与线圈(绕线部分)长度li及直径Di有关;Nc为线圈匝数;Di为线圈直径,单位:m。
通过分割长线圈改变为短线圈组,保持电机尺寸参数一定,改变线圈的匝数调整线圈电阻值和电气时间常数。
通过输入控制信号操作电机控制电路板驱动电路分别控制串、并联电路电子开关S1、S2、S3、S4的连通和断开,实现组合线圈的串联、并联动作。对该电-机械转换器装置切换后整个电路中线圈的电感L和电阻R的进行分析,如图3所示。
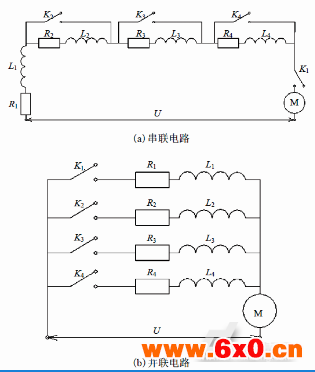
图3线圈电路示意图
串联电路中,如图3(a)串联环境下,假设:
①S1电路:开关K1、K2、K3、K4闭合,电感LS1,电阻RS1;
②S2电路:开关K1、K3、K4闭合,K2断开,电感LS2,电阻RS2;
③S3电路:开关K1、K4闭合,K2、K3断开,电感LS3,电阻RS3;
④S4电路:开关K1闭合,K2、K3、K4断开,电感LS4,电阻RS4;
采用并列式绕线方式的串联环境下,两线圈组耦合系数为1,串联线圈组的电感L、电阻R分别为:
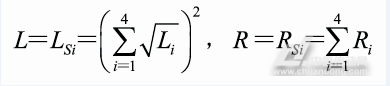 (3)
(3)
并联电路中,如图3(b)并联环境下,假设:
①P1电路:开关K1闭合,开关K2、K3、K4断开,电感LP1,电阻RP1;
②P2电路:开关K1、K2闭合,开关K3、K4断开,电感LP2,电阻RP2;
③P3电路:开关K1、K2、K3闭合,开关K4断开,电感LP3,电阻RP3;
④P4电路:开关K1、K2、K3、K4闭合,电感LP4,电阻RP4;
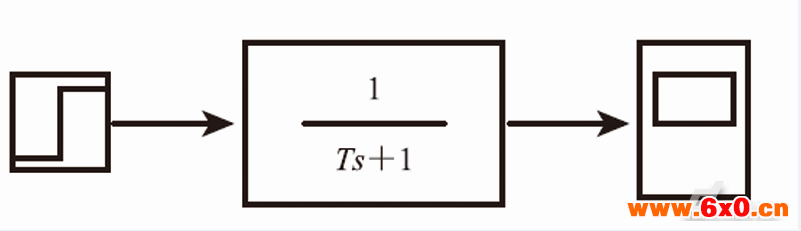
图4传递函数框图
采用并列式绕线方式的并联环境下,不考虑互感,则线圈组的电感L、电阻R分别为:
 (4)
(4)
平均分割后的线圈组件串联线圈组阻抗增加,线圈组件并联线圈组阻抗减少。
建模与仿真阶跃响应分析
在工作气隙内,根据载流控制线圈在均匀磁场中的受力,可得动圈组件空载力特性,如下:
 (7)
(7)
其中,Ki为电流力增益系数(N/A);i为线圈电流(A);Bg为气隙磁感应强度(T);Dc为线圈平均直径(m);Nc为线圈绕线匝数。
已知,联合公式(5)可得:
 (8)
(8)
其中,串联状态:
 (9)
(9)
并联状态:
 (10)
(10)
其中,Di为第i组线圈组件的直径;ρ为线圈组件的电阻率;A为线圈组件的导线截面积。结合上式可建立图4所示的传递函数框图。对四种串联结构的线圈组的两端,分别加载电压U=1V,通过MATLAB仿真,分别得到各自线圈组特性曲线。图5为四种串联结构的串联线圈组两端电压随时间变化曲线,设tr为响应达到最值时刻的时间:tr1=1.02ms,tr2=2.03ms,tr3=3.06ms,tr4=4.21ms。其中,S1的响应速度最快,S4的响应速度最慢,但最后都到达同一稳定状态并保持不变。
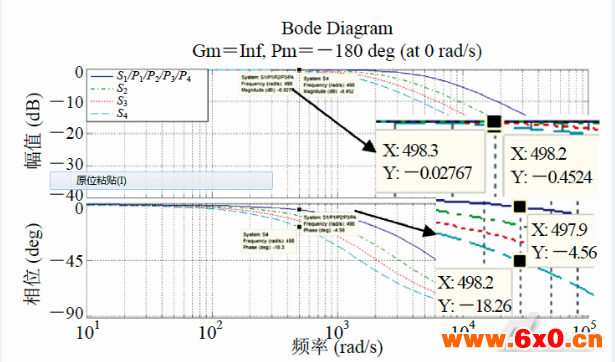
图5串联线圈组两端电压变化曲线
图6为四种串联结构的串联线圈组安培力随时间变化曲线。由图可知,四种串联结构的串联线圈组安培力F(t)响应具有不同的速度变化。其中,在tr1=1.02ms时,F1=17.2N、F2=16.6N、F3=15.2N、F4=13.6N。可见,S1的响应速度最快,而S4的响应速度最慢,但最终四种串联结构都基本达到17.3N的最值。
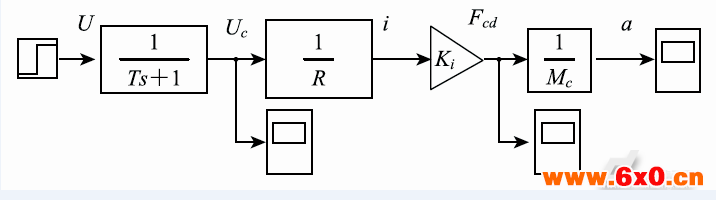
图6串联线圈组电磁力变化曲线
图7为四种结构的串联线圈组加速度a(t)响应随时间变化曲线。由图可知,S1的响应速度最快,其加速度值能达到1.72g(1.02ms);S4的响应速度最慢,其最后到达稳定状态并保持在1.73g左右(3.06ms)。其中,当tr1=1.02ms时,a1=1.72g、a2=1.66g、a3=1.52g、a4=1.36g,与图6的分析结果吻合。

图7 串联线圈组加速度变化曲线
同理,分别得到各自并联线圈组的特性曲线。四种结构的并联线圈组两端电压U(t)随时间变化,在允许的误差范围内(小于0.2×10-3s),四种不同并联结构的并联线圈组两端电压随响应时间变化曲线拟合,其上升时间tr与单组线圈响应时间曲线基本一致。
结论
在响应时间不变的情况下,串联环境下均匀分割的线圈组件由串联1组到4组串联,其载流响应时间增大到了约3倍;并联环境下,线圈组件线圈组并联组件数增到4组,总电阻减少,电阻线圈长度增加,电流增大,在其线圈加载响应速度与单圈线圈组件加载响应速度基本一致的情况下,理论上其电磁力增大到原来的16倍,加速度达到27.64g,能够实现高响应特性和大推力控制效果。








 QQ交流群
QQ交流群

