

两轮移动机器人是一个强耦合、欠驱动、复杂的非线性系统,其原理类似于行走的倒立摆系统,这种系统在控制理论和实际工程中极为典型,具有很高的学术研究价值。本文针对基于陀螺效应的双飞轮移动机器人的单输入四阶非线性动力学系统的控制器进行研究。首先对双飞轮移动机器人的自平衡原理进行力学分析,将四阶非线性系统的状态变量嵌入在一个滑模面上,采用李雅普诺夫第二法确定滑模控制律,用一个控制量实现四个状态变量的控制。再用Matlab/Simulink搭建控制仿真平台对移动机器人的动力学模型进行仿真,仿真结果表明该滑模控制律能实现一个控制量对四个状态变量的控制,且使双飞轮移动机器人模型在初始倾斜角度为30度的情况下,仍能稳定到平衡状态;此控制器还实现了对飞轮偏转角与偏转角速度的控制。
双飞轮移动机器人的工作原理
飞轮的陀螺效应如图1所示,转动惯量为的飞轮,以角速度绕轴旋转。令飞轮以偏转的角速度绕轴发生偏转,则飞轮因陀螺效应将产生一个沿轴正方向的陀螺力矩M。M=Jωω0双飞轮移动机器人的机械模型如图2所示。旋转电机带动飞轮以角速度ω绕Z轴旋转,当机器人的右侧受到撞击力时,控制系统令偏转电机带动飞轮以角速度ω绕Y轴偏转,飞轮即可产生抵消撞击力的陀螺力矩,保持机器人的侧向平衡。本设计采用了双陀螺联动结构设计,具体结构如图3所示,采用齿轮传动机构控制两个偏转轴同步偏转且方向相反。对图3中前、后飞轮产生的陀螺力矩进行正交分解可得:
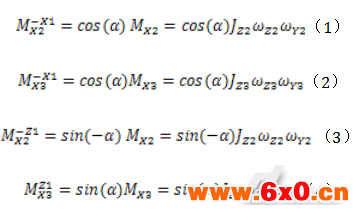
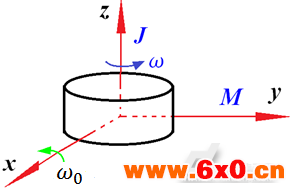
图1
式(1)~(4)中α为飞轮的偏转角,JZ2、JZ3分别为前、后飞轮的转动惯量,ωZ2、ωZ3分别为前、后飞轮的自转角速度,ωY2、ωY3分别为前、后飞轮的偏转角速度。MX2、MX3分别是前、后飞轮产生的陀螺力矩, 表示前飞轮产生的陀螺力矩;在机器人平面坐标轴X1负方向的分力矩,
表示前飞轮产生的陀螺力矩;在机器人平面坐标轴X1负方向的分力矩, 表示前飞轮产生的陀螺力矩在机器人平面坐标轴Z1负方向的分力矩,
表示前飞轮产生的陀螺力矩在机器人平面坐标轴Z1负方向的分力矩, 表示后飞轮产生的陀螺力矩在机器人平面坐标轴X1负方向的分力矩,
表示后飞轮产生的陀螺力矩在机器人平面坐标轴X1负方向的分力矩, 表示后飞轮产生的陀螺力矩在机器人平面坐标轴Z1正方向的分力矩,由ωZ2和ωZ3大小相等、方向相反,ωY2和ωY3大小相等、方向相反,JZ2、LZ3大小相等可得维持移动机器人平衡时的修正力矩和竖直方向上的分力矩为M2:
表示后飞轮产生的陀螺力矩在机器人平面坐标轴Z1正方向的分力矩,由ωZ2和ωZ3大小相等、方向相反,ωY2和ωY3大小相等、方向相反,JZ2、LZ3大小相等可得维持移动机器人平衡时的修正力矩和竖直方向上的分力矩为M2:
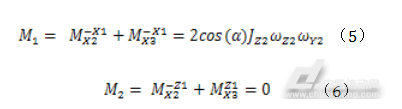
由(1)-(6)式可得到双飞轮产生的陀螺力矩只对机器人倾斜作用有影响。
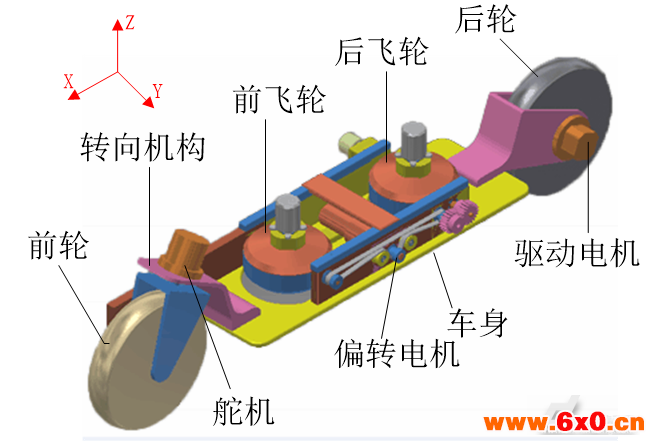
图2
滑模控制器的设计
在此基础上可得双飞轮移动机器人的动力学方程为:

式(7)中U为偏转电机两端的电压,κ1与偏转电机有关的常数,τ为控制的占空比即系统的控制输入,κ2与飞轮偏转有关的常数,J3为飞轮绕偏转轴的转动惯量,ω为飞轮的自转角速度,J2为飞轮自转转动惯量,G为机器人的重力,h为机器人重心离地面的高度,J1为机器人绕倾斜转轴的转动惯量。
设双飞轮移动机器人以恒定速度做直线运动,倾斜角为X1,倾斜角速度为X2,飞轮偏转角为X3,偏转角速度为X4,则式(7)可改写为: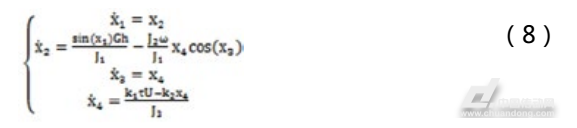
考虑到最后的偏转角趋近于0,则偏转角与偏转角速度变量应嵌入在滑模面上,因此选取切换函数为:

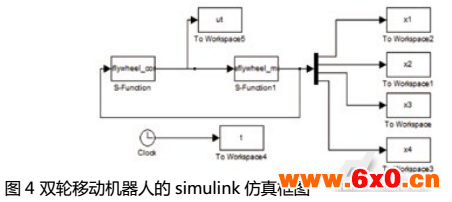
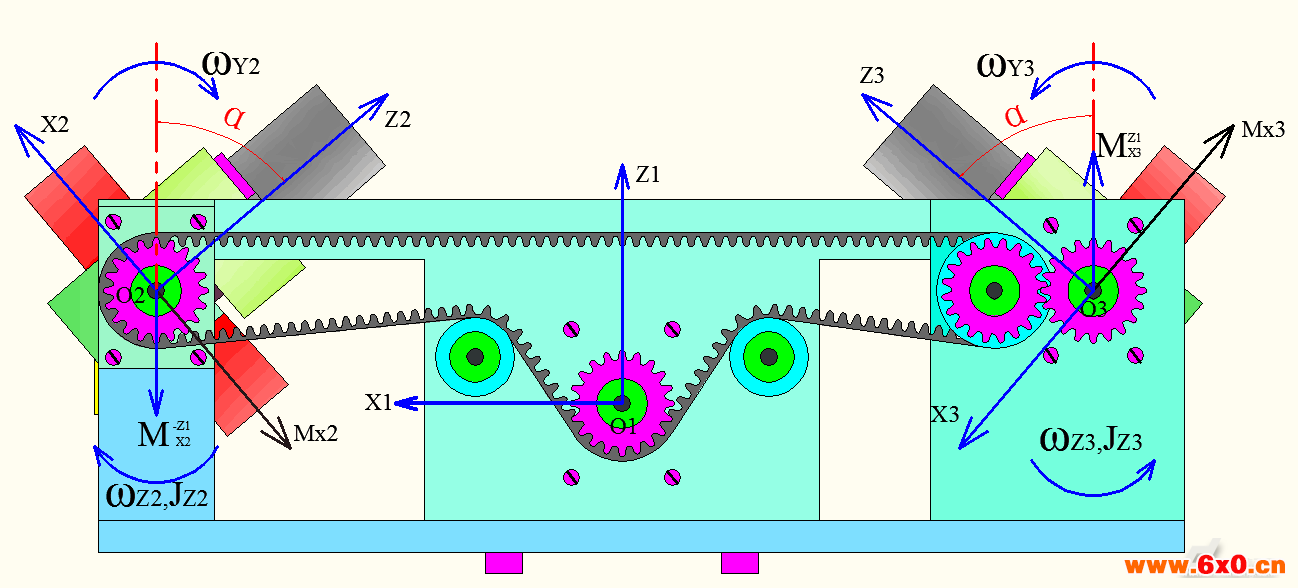
图3双陀螺驱动模块
式(11)中k>0,ε>0。将式(11)代入到式(10)中可得:

由式(12)可得所设计的滑模控制系统是大范围渐进稳定的。
计算机仿真
双飞轮移动机器人的结构参数和相关系数如表1所示。

取初始条件为x=(pi/6,0,0,0),x1d,c1=5,c2=0.005,c3=1,k=2,ε=0.1,k1=0.43,U=12,k2=1,用s-function函数编写控制算法和动力学模型,并在s-function中用饱和函数代替了切换函数,参数取0.1。用Matlab/Simulink搭建的仿真框图如图4所示。
通过Simulink仿真得到双飞轮移动机器人的倾斜角、倾斜角速度、飞轮偏转角及偏转角速度的时域响应图如图5所示。
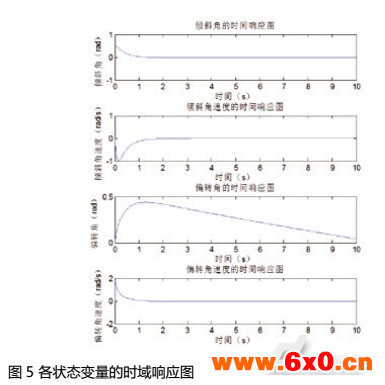
从图5可知设计的滑模控制律能实现机器人的倾斜角、倾斜角速度、飞轮偏转角及偏转角速度的同时控制,且使机器人在初始倾斜角度为30度的情况下仍能稳定到平衡状态。
结论
本文针对双飞轮移动机器人的单输入四阶非线性动力学系统设计了滑模控制率,实现了一个控制输入对机器人的倾斜角、倾斜角速度、飞轮偏转角及偏转角速度的同时控制,且动态响应良好。用MATLAB/SIMUlink搭建滑模控制的仿真平台对模型进行仿真,仿真结果表明。此控制器能使机器人在初始倾斜角为30度时能快速恢复到平衡状态。








 QQ交流群
QQ交流群

