

柔多关节工业机器人从传动角度可以另述为4到6关节工业手臂。作为人类手臂的延伸,广泛用于搬运,打磨,焊接,冲压等工作。多关机工业机器人可以单独工作,也可以多台协调工作。其可以作为生产机械的主体单独完成任务,也可以配合机床,塑胶机械,自动化生产线等其它机械完成上下料工作。始初我国没有此类设备的制造能力,少量的生产需求全靠欧洲和日本厂商提供或者跟随我国引进生产线配套进入国内。随着中国产业升级对自动化,少人化的不断推进,国内对多关节机械手臂的需求越来越大。我国多关节工业机械手臂的研发及生产企业也如雨后春笋般遍地开花。
作为机械人制造企业而言,要从机械本体,传动机械机构,减速机构,平衡储能机构,伺服电机,伺服驱动器,控制电脑系统等各个方面分别从总体到局部加以研究,方能设计制造出一个合适的产品。作为一个产业,单靠单一企业的能力很难承担机械手臂所需的所有关键零部件,一个专业人员也无法掌握所有关键的技术,因为专业分工已经非常之细了。本人及所在的企业专门从事伺服电机的研究,设计和制造。公司从2009年开始立项,研究机械手臂的运动特性,并特别关注机械手臂所需伺服电机的特点,历时8年,开发出适合此类设备的GK系列伺服电机。在R-GK6,R-GK8基础上新推出的R-GK9系列永磁伺服电机就是专门针对6关节机械手臂应用而开发的。与原有系列产品相比,新一代的产品使用了新的材料及最新的磁场设计技术,使得电机功率密度更高,体积也更为小巧。
下面就仅从伺服电机在6关节机器人上的应用角度谈谈对机器人电机的一点看法及经验分享。由于水平所限,文中难免疏漏错误,望读者见谅,权且视为抛砖引玉,提起大家讨论这个专题的兴致。
机械手臂机构构造
多关节机械手最多有7个自由度。第七轴通常在应用二次开发时接入,机械手本体制造常涉及到4轴或6轴。其结构如下图所示。
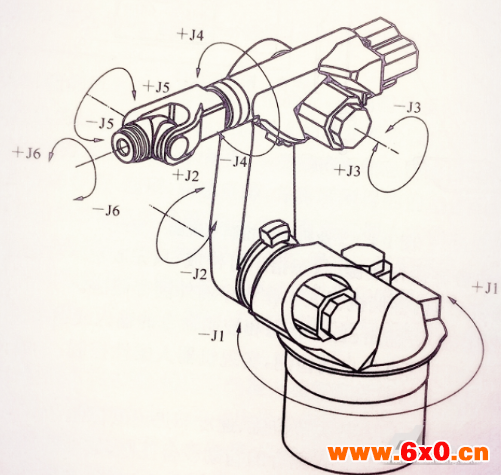
机械手臂电机的惯量特点从图中可以看出,J1,J2轴负担整个机构的重量,在手臂工作过程中,机构会随机打开和收缩。从J1,J2电机的应用角度来看,负载的机械惯量是实时变化的。根据以往经验,负载的惯量变化范围在7倍以内。J3,J4,J5负载的机械惯量也是变化的,只是变化的范围没有J1和J2大。这样从控制的角度的角度来看,对电机的要求是惯量要足够大,系统才容易进入稳定区。所以轴1,轴2要选用大惯量电机,轴3,轴4,轴5选用中惯量电机。轴6的电机一般安装在机械手臂内部,更看重小体积,低发热的功率密度特性。以上就是6关节机械手臂不同轴在电机选型方面对惯量的要求。
关节手臂电机的工作特性及要求
多关节机械手各电机是多轴联动工作的,总体上属于S3间歇工作制,从某一个动作的完成来看,属于恒扭矩高加减速性质。为了减小工作机构的体积,往往通过小体积大速比的RV减速箱链接传动机构。这样对高速响应的机器人而言,必然要求高速,高响应,小体积的电机,为了配合高惯量,轴1到轴3的电机从外形上看必然是比较粗短的。
安全机械抱闸的需求
6关节机械手电机大多需要机械抱闸来保证安全,由于受到重力和运动惯性的影响,抱闸力矩的安全系数要较通用机械的要求为大,按使用环境的不同安全系数要求也从1.5到2.0不等。总之,任何情况下要保证不能够溜车。另外,为了保证机械手臂的总体安全性,抱闸信号从控制系统直接给出,而不是从伺服驱动器给出。具体控制信号的协调和抱闸的保护就不再这里展开了。
伺服电机编码器和可靠重复定位
由于多轴联动的空间运动特点,关节电机选择多圈绝对位置编码器最好。目前流行由齿轮机构保证的多圈位置记忆型编码器和由电池供电通过电路记忆多圈位置型两类。从长期便于维护的角度来看,第一类编码器是比较好的,但从初次投入成本考虑,第二类编码器是比较合适的。
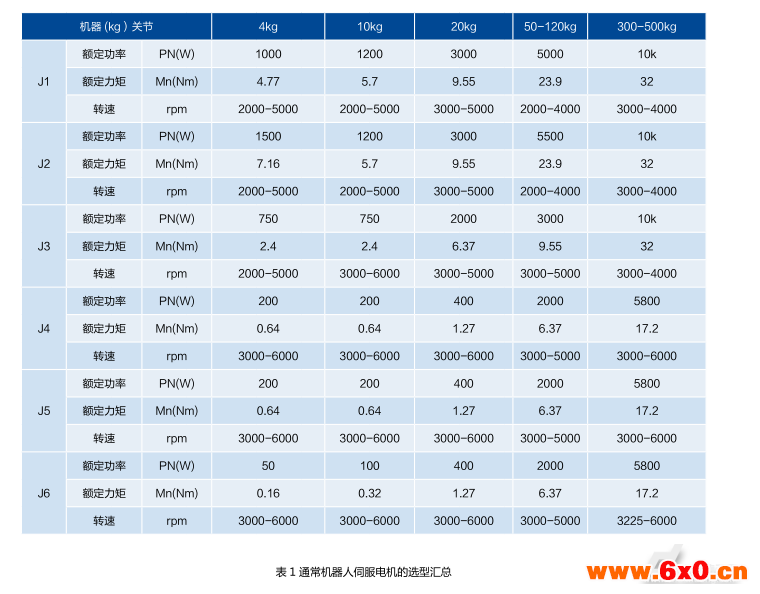
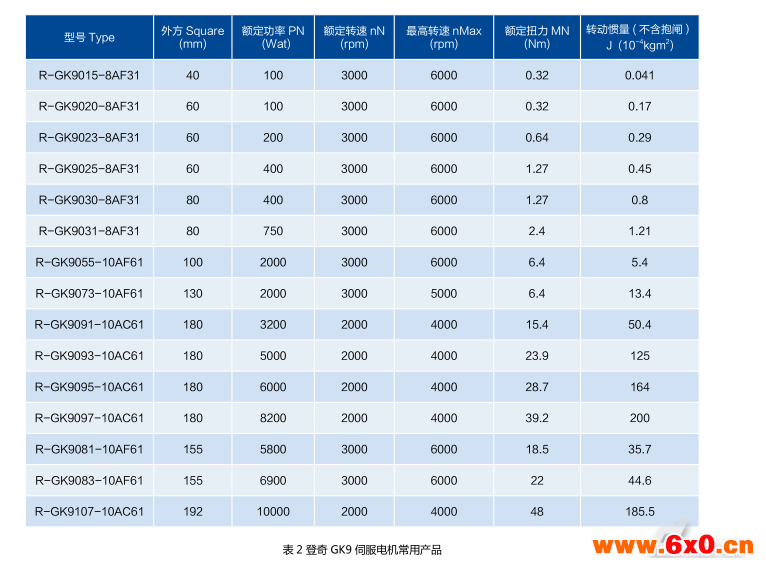
表1和表2分别是通常机器人伺服电机的选型汇总,以及登奇GK9伺服电机常用产品,这些产品广泛使用在国内知名厂商和部分国外机器人制造厂商的机械手臂上。具体的转速和转动惯量基于不同的机械设计做针对性调整。总之,机械手臂是一个高度机电一体化集成的机构,需要机械工程师和伺服电机提供单位紧密沟通,才能开发出最为合理的产品。








 QQ交流群
QQ交流群

