

摘要:无人艇航向在航行的过程中易收到风浪流等外界干扰,针对干扰频繁打舵修正航向,不仅会加速舵机的磨损,还会增加船舶的功耗。针对这一问题,提出来一种采用模型预测的区间控制算法。该方法将航向参考轨迹和方向舵增量作为在在线优化求解的变量,参考轨迹自动跟踪航向,从而实现降低打舵次数和打舵幅度,进而降低船舶功耗。最后以某船的航向区间控制问题为例进行仿真,验证了算法的有效性。
关键词:低功耗;航向区间控制;预测控制
中图分类号:TP27文献标识码:A
1引言
无人艇在海洋中航行时易受到风浪流等海洋环境的干扰,如果依靠频繁地打舵抵抗风浪流干扰来保持航向,不仅会加速舵机的磨损还会大幅增加船舶的功耗,如何降低无人艇的功耗是一个值得研究的问题。在船舶运动控制方面,JawharGhommam等人将系统变换为一个纯粹的串行结构,再利用一个非连续反步控制器使整个系统达到全局渐近稳定,利用仿真验证了算法的有效性[1]。K.D.Do通过结合李雅普诺夫直接法,反步发和参数估计设计控制器,可以使得水下航行器的路径跟踪误差达到任意小[2]。ThorI.Fossen提出了一种积分自适应LOS导航算法,将漂角作为一个固定参数通过自适应算法辨识出来,并通过仿真验证了算法的可行性[3]。MortezaMoradi等人船舶横摇运动过程中存在状态测量不精确,外界干扰,模型参数不确定等问题设计了一个基于干扰上界已知的滑模控制器,并采用一个二阶自适应滑模面来减少输出抖振现象,利用仿真验证了算法的有效性[4]。WeiMeng等人提出了基于两个滑模面的控制器用于船舶轨迹跟踪,其中一个一阶滑模面用于跟踪纵向误差,另外一个二阶滑模面用于跟踪横向误差,并通过仿真验证了算法的有效性[5]。在降低船舶能耗方面,刘勇等人提出了一种S/KS混合灵敏度H∞鲁棒控制算法。达到在保持航向的同时,减小打舵次数的目的,通过仿真验证了算法的有效性[6]。陈欣提出了通过优化全程各航段船舶的前进速度,使船舶在每一航段的油耗量最小来实现整个航程总体油耗量最小的办法[7]。任洪莹建立了船、机、桨、翼的数学模型,提出了改善船舶主推进系统性能的相关措施和风翼-柴油机混合动力船舶的新型调速控制策略[8]。李胜观察主机的相关参数随着转速变化的规律。并给出了实施船舶降速航行时应采取的具体措施[9]。
本文从无人艇航行的实际需求出发,结合舵角、舵速的约束设计控制器在无人艇巡航的过程中降低打舵幅度和打舵次数实现航向区间控制,并运用matlab中的simulink搭建实验平台,通过仿真验证方法的有效性。
2无人艇水平面运动数学模型
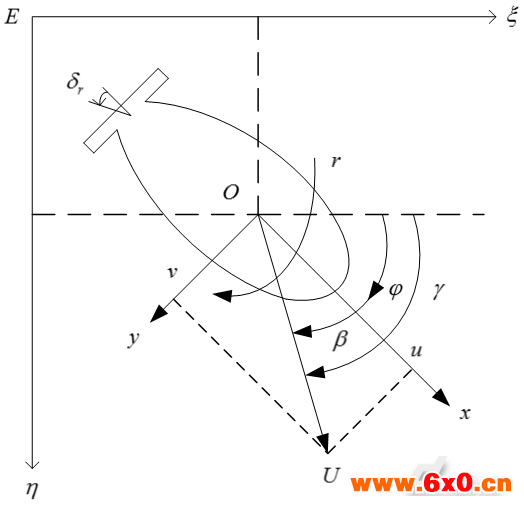
图1无人艇运动水平面坐标系
Fig.1Thecoordinateframeofshiphorizontalmovement
如图1所示,无人艇在水平面运动分为大地坐标系和运动坐标系,坐标系中各参数意义如下所示:
Eξη 、Oxy分别代表大地坐标系和运动坐标系;u、v、U分别代表无人艇纵向速度、横向速度以及合速度;
β、φ 、γ分别代表无人艇漂角、艏向角以及无人艇速度与大地坐标系横轴的夹角;
r代表无人艇艏向角速度;
δ r代表无人艇方向舵的舵角;
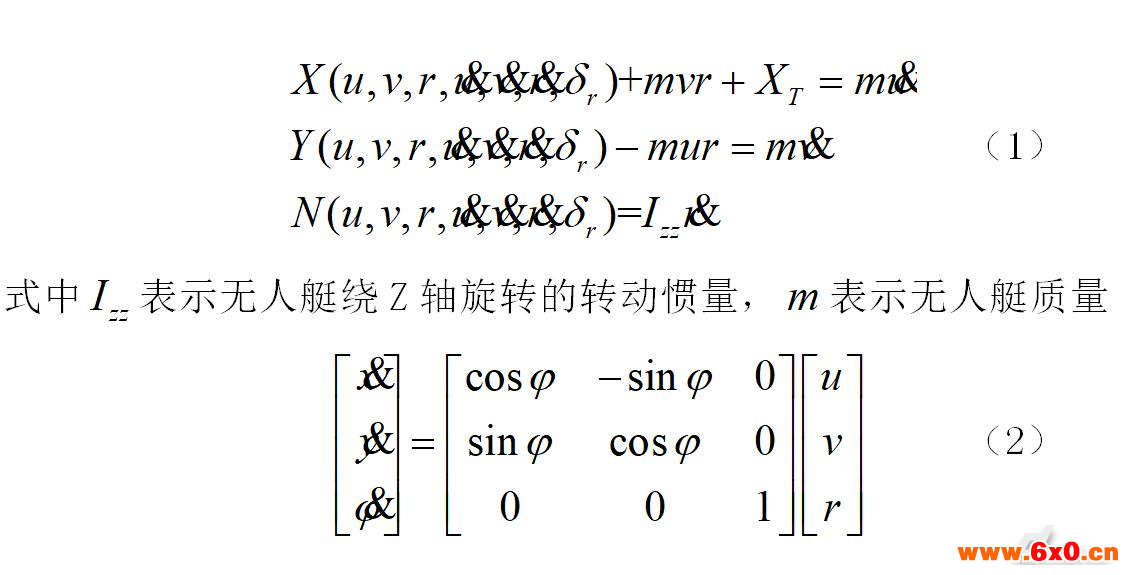
无人艇水平面运动模型一般方程如下所示:
为了方便进行控制器的设计,需要对如上所示的无人艇非线性运动方程进行简化。首先考虑下面两个水动力函数的线性化问题
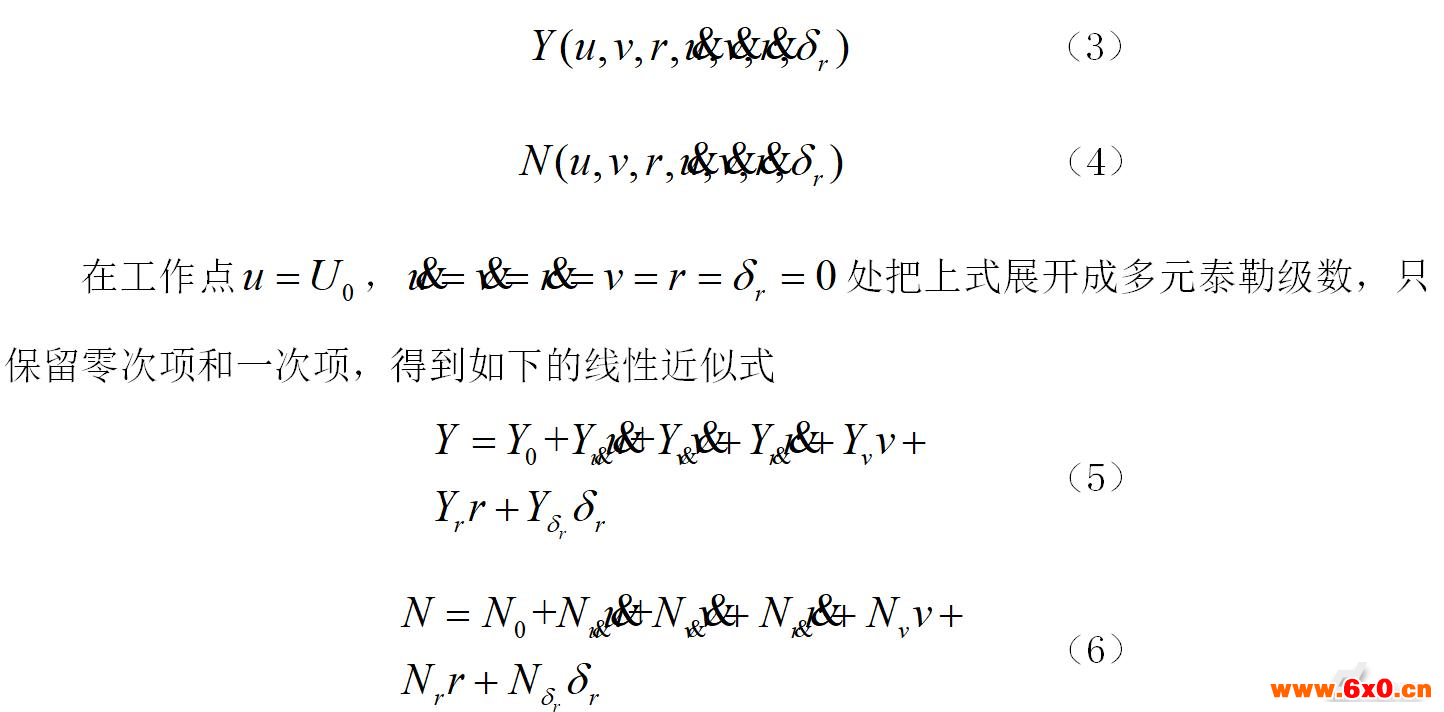
假设船外形中面保持对称,前后近似对称,
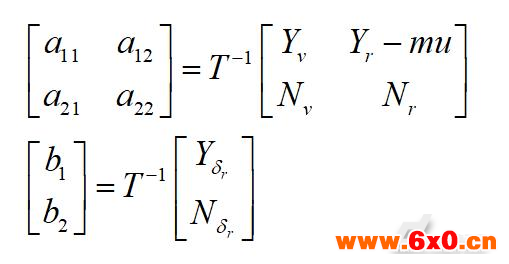
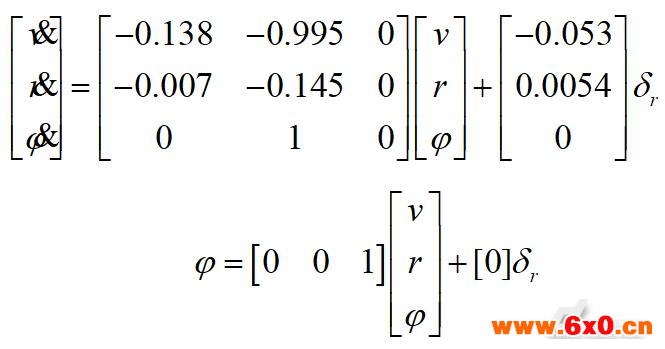
纵向速度在微幅机动中近似保持线性不变,其增量可以忽略。由此可得Y0=NO=0,u.=0。将式(5)、(6)带入式(1)中,可以得到无人艇水平面操纵的线性方程,将其写成矩阵形式得到
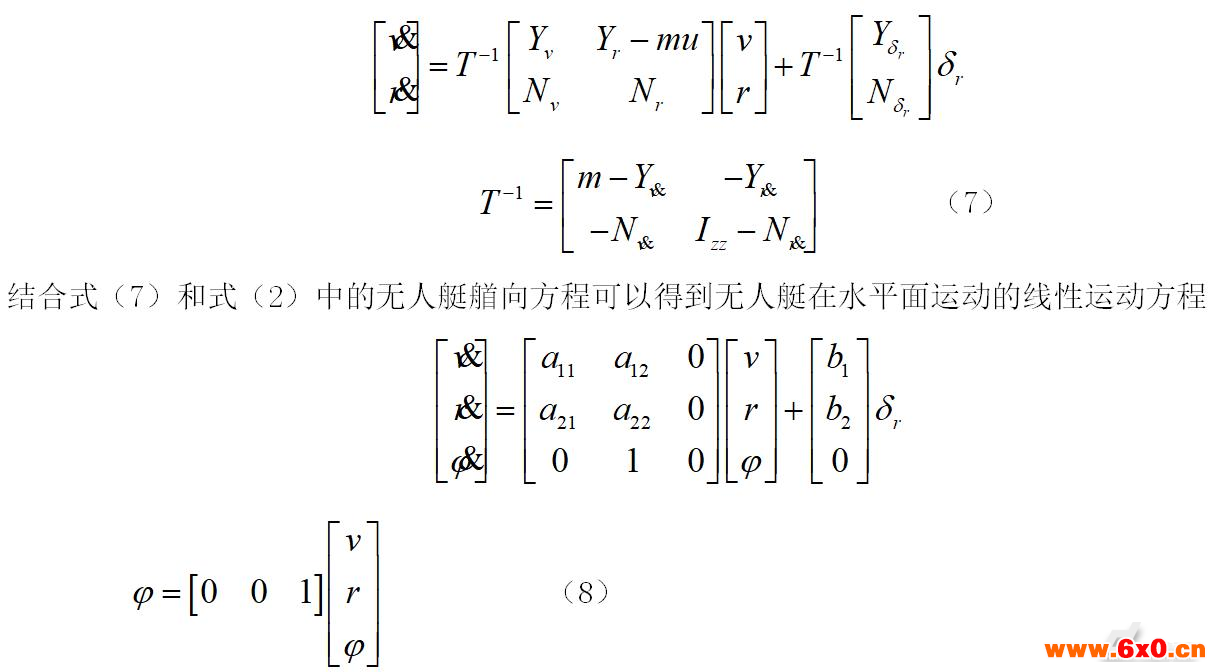
其中
3航向控制器设计
预测控制是一种从工业应用中发展起来的优化控制算法,预测控制算法的原理可以总结为下:在某一采样时刻利用对象模型在一定的控制量作用下进行未来时刻对象状态的预测,在此基础上根据给定的约束条件进行控制器求解,在此采样时刻通过检测系统的实时状态来修正对系统未来时刻的预测,总结起来就是预测模型、滚动优化和反馈校正三个步骤,由于预测控制器能够很好的处理带约束问题的求解,因此本文将基于预测控制设计控制器来处理舵角舵速约束下无人艇航向区间控制问题。
3.1模型预测
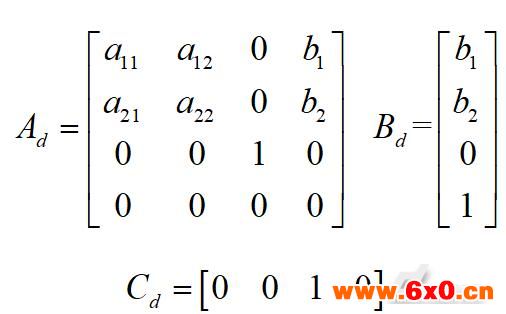
根据第二章中的无人艇水平面运动线性方程(7)进行多步预测。考虑到实际建模误差和控制过程中存在的噪声,采用基于增广状态的状态空间方程进行预测,如下所示
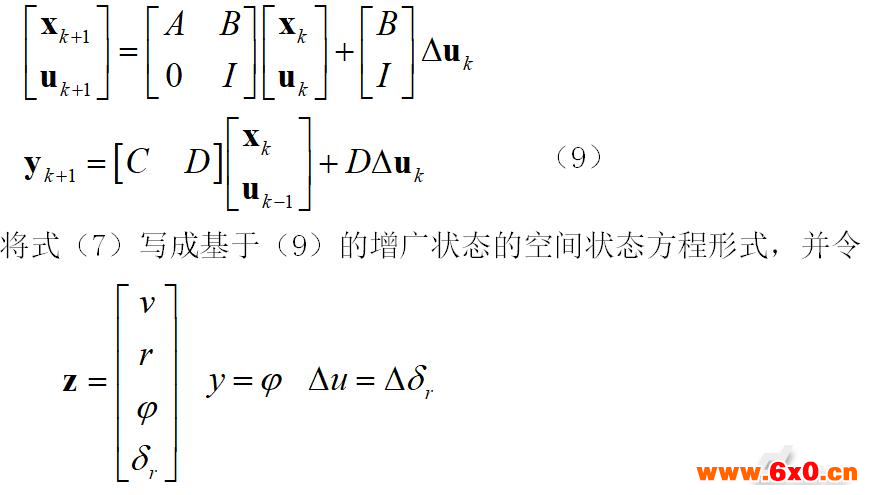
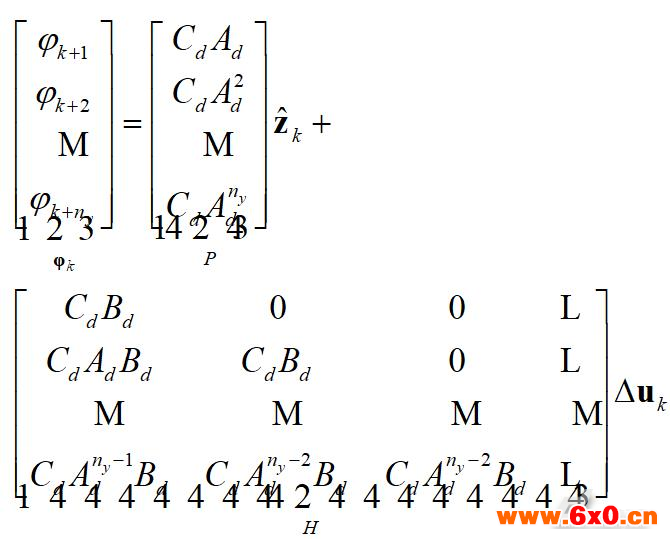
以预测步长ny,控制步长nu对无人艇水平航向进行输出预测,预测方程如下所示:
其中
即得到如下所示的预测方程式

3.2约束处理
由于物理条件的限制,无人艇方向舵存在着舵角舵速的物理约束,同时为了降低无人艇在干扰中的打舵幅度和打舵次数,将对航向控制设定控制区间。
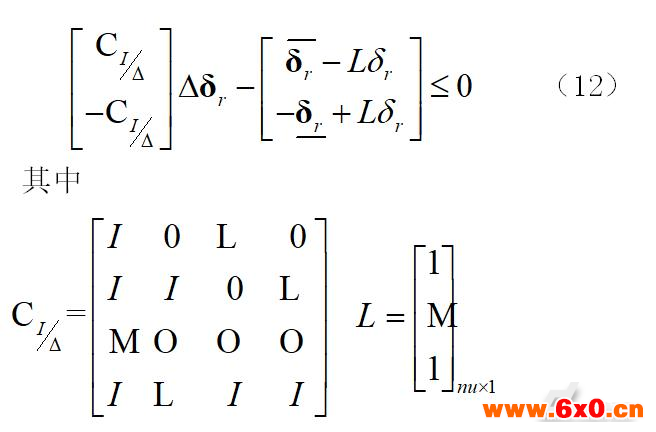
舵速的约束也就是控制量的增量约束,将控制量增量的上下限分别 、
、 ,写成矩阵不等式的形式即
,写成矩阵不等式的形式即
舵角的上下限分别记为 、
、 ,将舵角约束写成矩阵不等式的形式即
,将舵角约束写成矩阵不等式的形式即
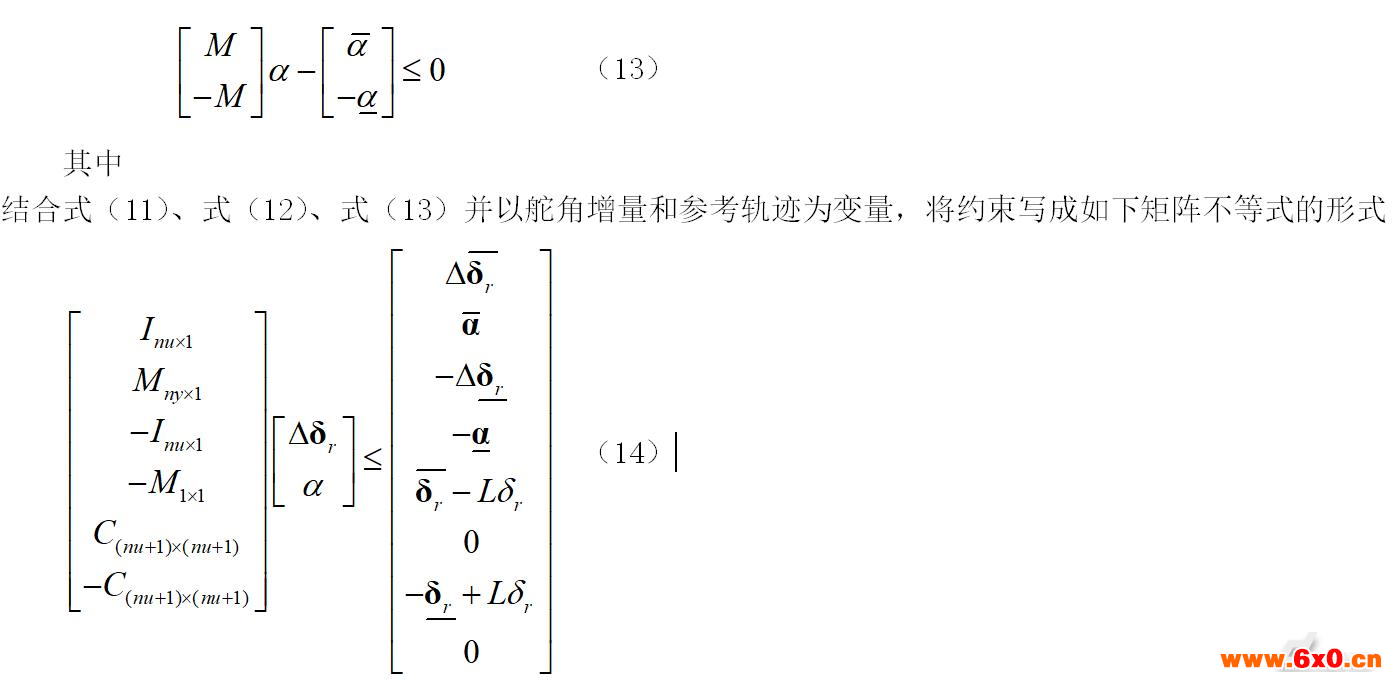
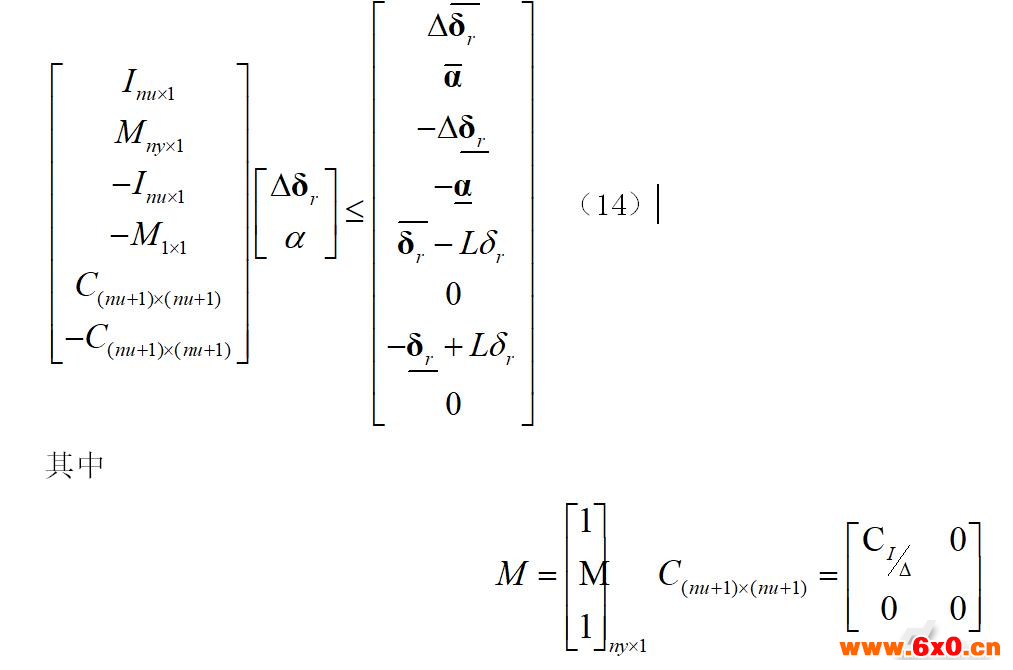
为了实现航向区间控制,引入优化参考轨迹,其中参考轨迹α,将α也作为一个输出量进行求解和约束,其约束区间即为航向控制区间,将参考轨迹的约束写成矩阵不等式的形式为
3.3控制律求解
在舵角舵速以及航向区间的约束下,采用如下代价函数进行控制律求解

将式(10)带入代价函数进行求解
代价函数中的常数项对控制律求解没有影响,将代价函数中的常数项去掉以后将结果写为如下形式
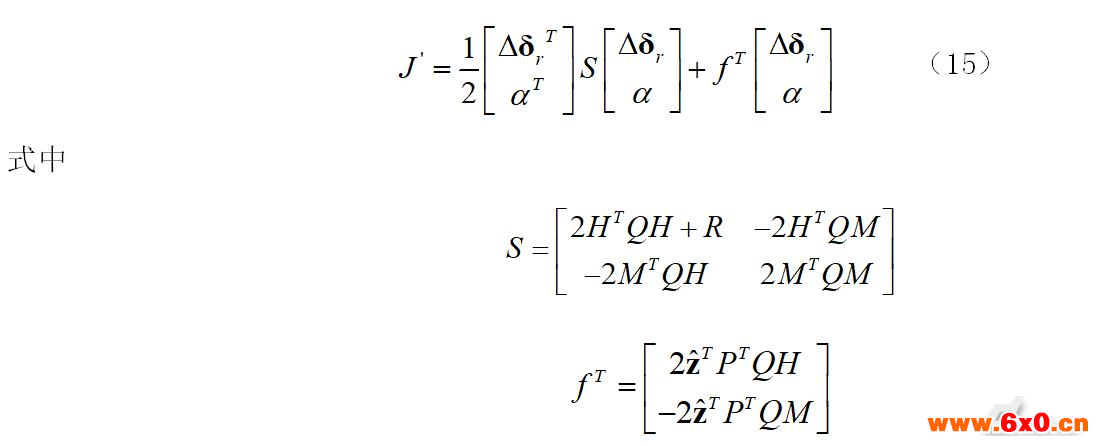
由式(14)与(15)可知,控制律的求解是一个标准二次规划(QP)问题的求解,采用二次规划解法可以求得约束下的最优解O*,则可得当前时刻输出和当前时刻最优参考轨迹
4仿真分析
为验证上文所提出的区间控制算法的有效性,以某无人艇的航向控制问题为例进行仿真。
无人艇水动力系数如下表所示
表1无人艇水动力系数
Tab.1tableofunmannedsurfacevesselhydrodynamiccoefficients

在9节航速下得到无人艇在水平面运动的线性运动方程为
假设系统初始状态为零,初始输入和输出为零,设置仿真参数如下表所示
表2仿真参数
Tab.2simulationparameter

按照上表所示参数,以0.2s为一个控制周期在matlab上进行区间预测控制仿真,仿真曲线如下图所示
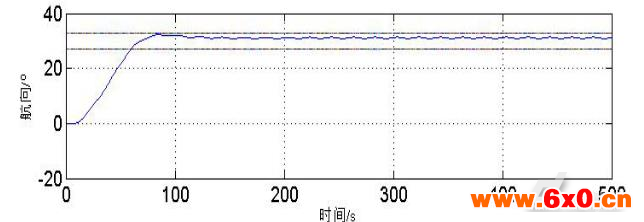
图2航向曲线
Fig.2simulationresultsofheading
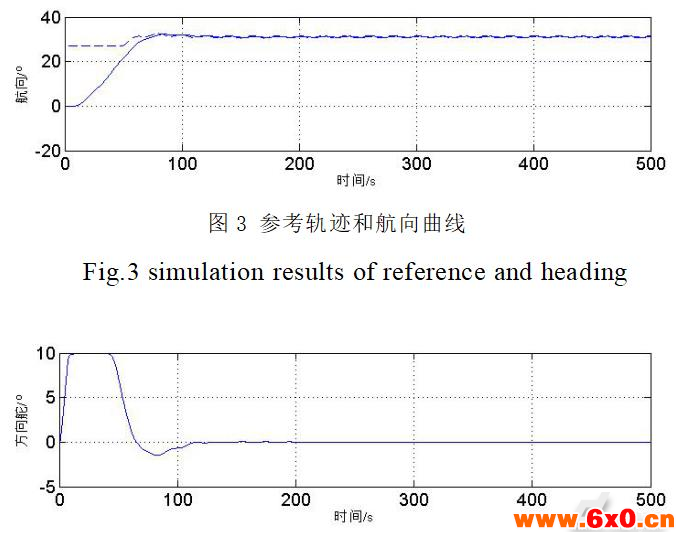
图2中实线为航向曲线,虚线部分为设定的区间上下界,从图2中可以在有艏向加速度干扰的情况下,航向被很好的控制在了给定的区间范围内。图3为参考轨迹和航向的曲线,图中虚线为参考轨迹,实线为实际航向,从图中可以看出,在起始阶段,航向处于约束区间之外,此时参考轨迹为航向约束区间的最小值(27°),当航向进入约束区间以后,通过将参考轨迹当作约束变量进行在线优化求解,可以使得参考轨迹自动跟随航向。图4为实际的舵角曲线,从图中可以看出舵角和舵速都被控制在了给定的区间内,当航向在给定的区间内变化时,方向舵几乎不动舵,大幅度减少了打舵次数和打舵幅度。该仿真验证了本文提出的航向区间预测控制算法的有效性。
5结论
本文首先分析了无人艇航向在风浪流等干扰下的运动特点,提出了通过航向区间控制来大幅度减少打舵次数和打舵幅度的控制方法。该方法将航向参考轨迹以及方向舵增量输出作为在线优化求解的约束变量,当航向在约束区间外时,参考轨迹为约束区间的边界值,控制器控制无人艇航向向参考区间靠拢,当航向在控制区间内时,经过在线优化求解的参考轨迹自动跟踪航向,使得代价函数的值最小,从而可以降低打舵次数和幅度进而降低无人艇整体功耗。最后应用该方法在某无人艇航向区间控制问题上进行仿真,取得了良好的控制效果。
参考文献
[1]J.Ghommam,F.Mnif,A.Benali,N.Derbel,“AsymptoticBacksteppingStabilizationofan
UnderactuatedSurfaceVessel,”IEEETrans.ControlSyst.Technol.,vol.14,no.6,pp.1150–1157,Nov.2006.
[2]H.Wang,D.Wang,Z.Peng,L.Yan,L.Diao,“Robustadaptivedynamicsurfacecontrol
forsynchronizedpathfollowingofmultipleunderactuatedautonomousunderwatervehicles,
”2014,pp.1949–1954.
[3]T.I.Fossen,K.Y.Pettersen,R.Galeazzi,“Line-of-SightPathFollowingforDubinsPathsWithAdaptiveSideslipCompensationofDriftForces,
”IEEETrans.ControlSyst.Technol.,vol.23,no.2,pp.820–827,Mar.2015.
[4]M.Moradi,H.Malekizade,“Robustadaptivefirst–second-orderslidingmodecontroltostabilizetheuncertainfin-rolldynamic,”OceanEng.,vol.69,pp.18–23,Sep.2013.
[5]GuoChen,ShenZhipeng,MengWei,LiuYang,“Slidingmodetrajectorytracking
controlofunderactuatedsurfacevessels,”2012,pp.1866–1870.
[6]刘勇,李文魁,陈永冰,“低能耗无人艇航向保持混合灵敏度H∞控制算法,”武汉理工大学学报,no.6,pp.95–97,2010.
[7]陈欣,“无人艇节能航速智能化系统研究与设计,”博士,武汉理工大学,2013.
[8]任洪莹,“风翼助航无人艇主动力装置特性研究,”博士,大连海事大学,2012.
[9]李胜,“无人艇主机降速节能研究,”博士,大连海事大学,2011.








 QQ交流群
QQ交流群

