

修改位置信息条件如下:
已选定需修改的程序
示教盒处于“ON”状态
修改位置信息有以下两种方法:
1.示教修改法
2.直接输入法
方法一:示教修改法
1)移动光标到需修正位置的动作指令的行号处;
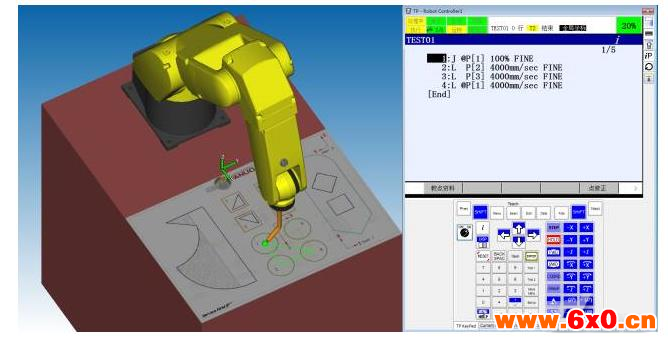
2)示教机器人到新位置;
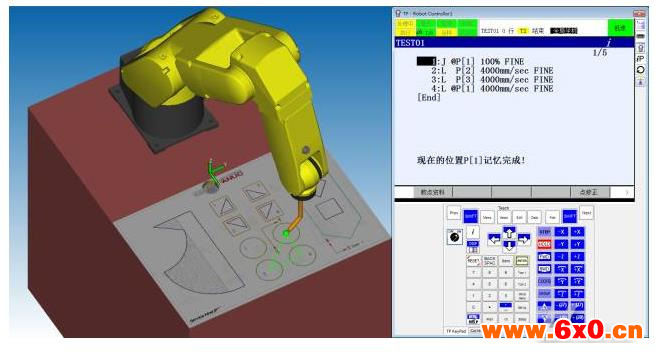
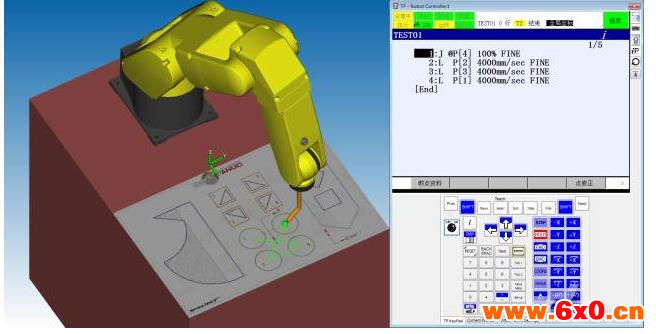
3)按【SHIFT】+F5【点修正】即可记录新位置,当该行出现@符号时,表示位置信息已更新。
若所修改的位置号在程序中多次出现,则在更新数据时有以下提示:
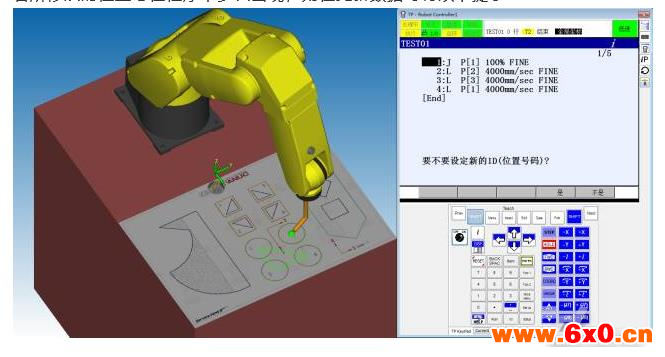
选择【不是】代表更改程序中所有该位置号对应的位置信息
选择【是】代表只更改本行的位置信息
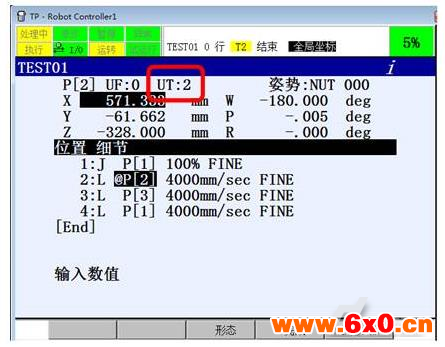
若当前激活的工具及用户坐标系号和程序中记录的不一致,则在更新数据时有以下提示:

输入1时,P[2]位置如下图所示

输入2时,P[2]位置如下图所示
若该指令行有OFFSET等偏移动作附加语句存在,则在更新数据时有以下提示:
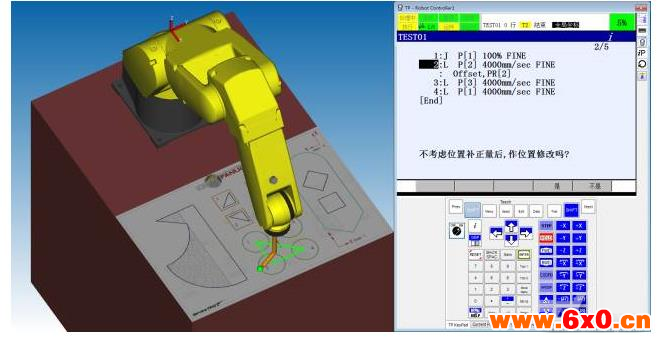
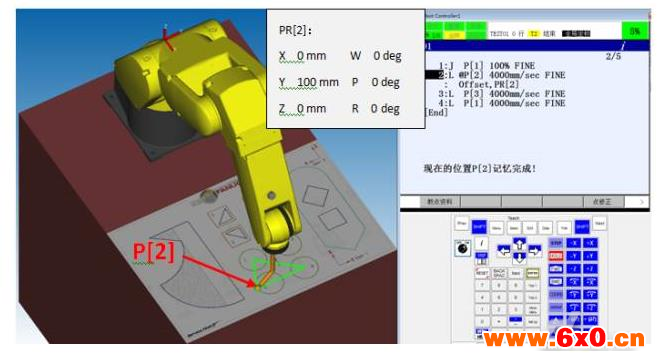
选择【是】代表当前机器人位置记录至P[2]
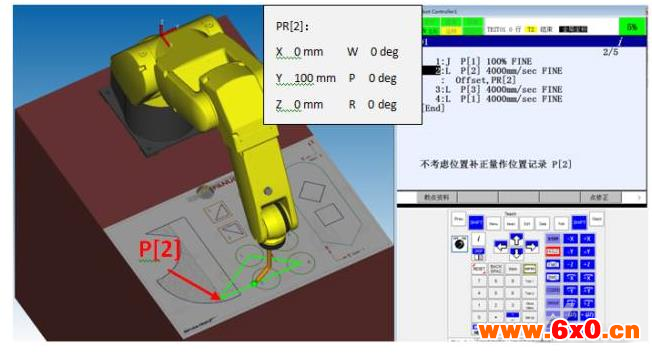
选择【不是】代表当前位置减去偏移量PR[2]后为P[2]位置
方法二:直接输入法
1)移动光标到需修正位置的编号处;
2)按F5【POSITION】(位置)显示位置信息;
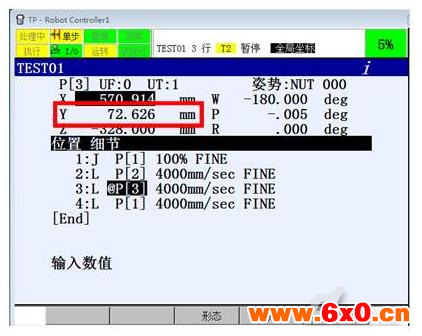
3)输入新的位置数据;
(Y的数值由72.626改为172.626)
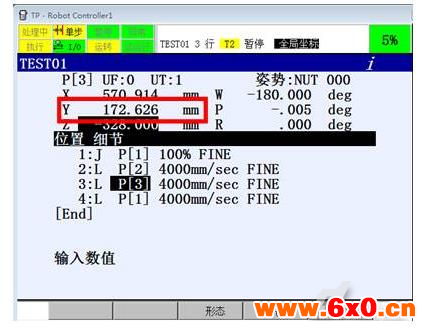
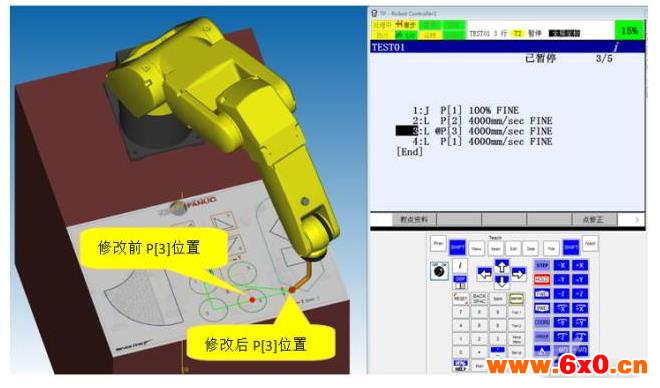
4)按F4【DONE】(完成)退出,该点位置如下图变化:








 QQ交流群
QQ交流群

