

摘要按照ISO8373的定义,工业机器人是指位置可以固定或移动,能够实现自动控制、可重复编程、多功能用途、末端操作器的位置要在3个或3个以上自由度内,可编程的工业自动化设备。
按照ISO8373的定义,工业机器人是指位置可以固定或移动,能够实现自动控制、可重复编程、多功能用途、末端操作器的位置要在3个或3个以上自由度内,可编程的工业自动化设备。
机器人大讲堂等联合发布的《中国机器人产业发展研究》显示,截至去年底,国内机器人相关企业已达6500余家,目前国内机器人产业园共有60余个。
在众多国内工业机器人厂家中,各家工业机器人的性能如何?针对工业机器人,我国最新的工业机器人性能检测标准是《GB-T12642-2013工业机器人-性能规范及其试验方法》(等效于《ISO92831998》,下面简称国标),里面列出了位姿准确度和位姿重复性、多方向位姿准确度变动、距离准确度和距离重复性、位置稳定时间、位置超调量、轨迹准确度和轨迹重复性、重复定向轨迹准确度、拐角偏差、轨迹速度特性、最小定位时间和摆动偏差等14项性能指标。
需要注意的是,为了对比不同机器人的性能指标,按照上述标准的规定,下列参数必须相同:试验立方体的尺寸、试验负载、试验速度、试验轨迹、试验循环和环境条件。
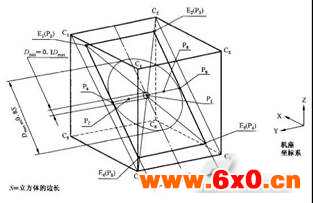
▲国标中试验轨迹实例
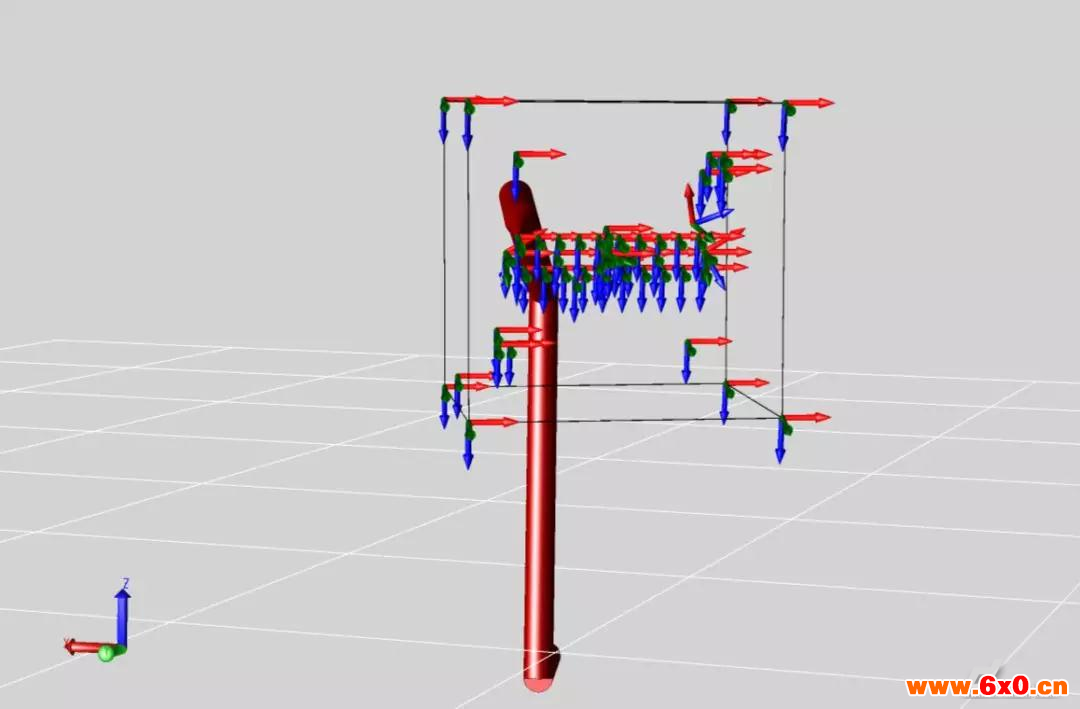
▲Robodyn中生成轨迹实例
徕卡激光跟踪仪AT960是全新一代的便携式三坐标测量系统,可提供6自由度(6DoF)的静态和动态自动跟踪测量,配合Robodyn软件,可实现对工业机器人DH参数的标定,和国标中的性能检测。AT960内置绝对干涉仪,可是实现激光头到辅助测量装置(如反射球、T-mac、T-probe)的绝对距离测量,加上内置高精度编码器对天顶角和方位角的测量,形成一个球坐标测量系统,并自动转化为空间直角坐标系,可测得辅助测量装置在三维空间中的位置。
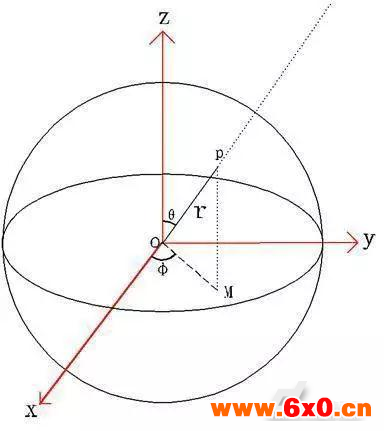
▲球坐标系
若辅助测量装置为Tmac,因Tmac上有规则地嵌有10个红外LED,配合AT960内置的高速相机,可实现对辅助测量装置姿态的测量。通过把辅助测量装置Tmac固定在机器人末端,AT960可实时高速测量出机器人的位置和姿态,从而可实现对国标中位姿重复性、距离准确度和距离重复性、位置稳定时间、轨迹重复性,最小定位时间和轨迹速度特性等的测量。
若在性能测试之前,对机器人DH参数进行标定,则AT960可得到机器人基坐标系相对AT960测量坐标系和工具坐标系相对机器人末端坐标系的关系,从而可实现对国标中有关准确度的测量。

▲测试现场实例
沃德检测是首家民营机器人检测认证机构,集检测、检验、认证、验货、技术培训、实验室建设和资质申请为一体的综合性第三方公共服务平台。

沃德检测拥有专业的技术团队,主要认证项目有:机器人CR,中国CCC、SRRC、欧盟CE、ROHS、REACH、美国UL、ETL、韩国KC、体系ISO9001、ISO14001以及机器人性能测试(GB12642&ISO9283)等等,欢迎来电咨询。








 QQ交流群
QQ交流群

